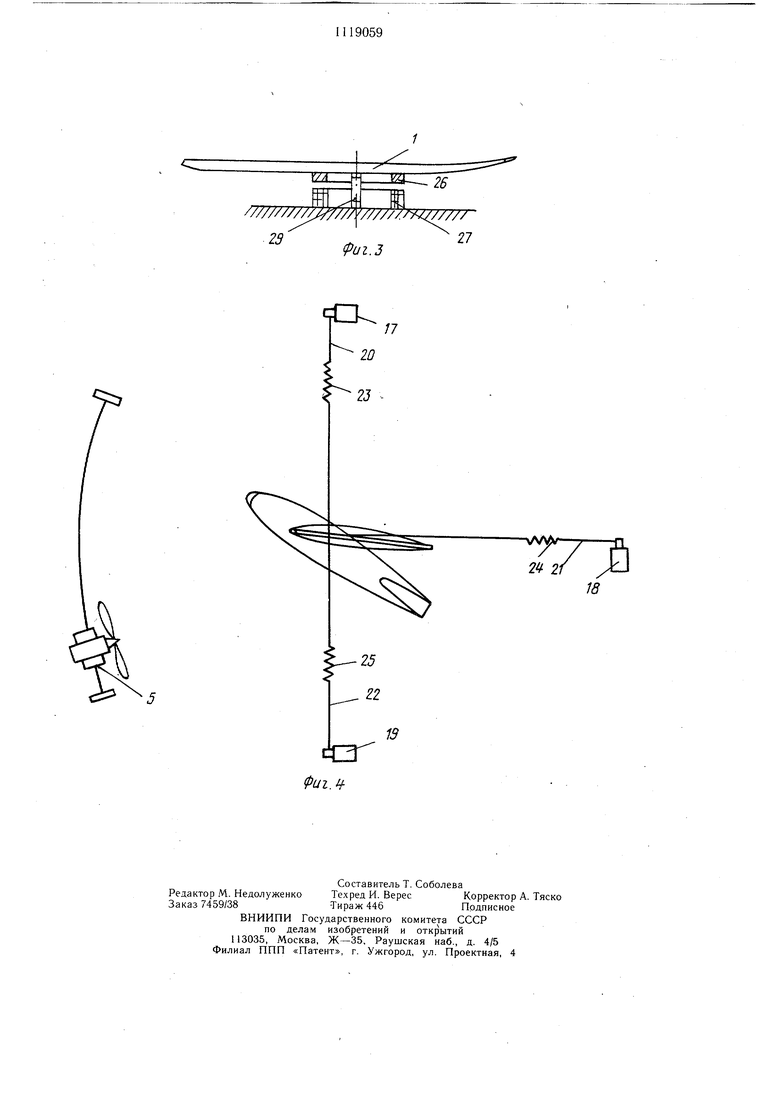
Изобретение относится к тренажерам для обучения и тренировки яхтсменов управлению парусной доской (боардсейлингом). Наиболее близким к изобретению является тренажер по технике управления парусной доской, содержащий корпус доски, имитатор парусного вооружения, включающий мачту с уишбоном, датчик угла поворота мачты, датчик угла и скорости ветра, вентилятор с механизмом его перемещения по направляющей, датчик крена и дифферента доски и электронный блок управления, состоящий из блока оценки тягового усилия грота, блока определения кренящего момента, блока определения приводящего момента, блока определения циркуляции, блока определения остойчивости доски, первый вход которого связан с датчиком крена и дифферента доски, первый и второй входы блока оценки тягового усилия грота соответственно связаны с датчиком угла поворота мачты и датчиком угла и скорости ветра, а выход блока оценки тягового усилия грота подключен к первому входу блока определения кренящего момента, первому входу блока определения приводящего момента и первому входу блока определения циркуляции, второй вход которого соединен с датчиком угла и скорости ветра, который также подключен к второму входу блока определения кренящего момента, третий и четвертый входы которого соответственно подсоединены к выходу блока определения приводящего момента и к выходу блока определения циркуляции 1. Однако подвеска корпуса известного тренажера не позволяет спортсмену балансировать в условиях, аналогичных реальным, а силовые приводы на парусное вооружение не позволяют воспроизводить истинные нагрузки, возникающие при движении парусной доски. Цель изобретения - повышение эффективности тренировки и обучения яхтсменов в условиях, когда нет возможности выйти на воду (поздняя осень, зима, ранняя весна), и повышение качества тренерского контроля за техникой управления парусной доской. Поставленная цель достигается тем, что в тренажер яхтсмена по управлению парусной доской (боардсейлингом), содержащий корпус доски, имитатор парусного вооружения, включающий мачту с уищбоном, датчик угла поворота мачты, датчик угла и скорости ветра, вентилятор с механизмом его перемещения по направляющей, датчик крена и дифферента доски и электронный блок управления, состоящий из блока оценки тягового усилия грота, блока определения кренящего момента, блока определения приводящего момента, блока определения циркуляции, блока определения остойчивости доски, причем первый вход которого связан с датчиком крена и дифферента доски, первый и второй входы блока оценки тягового усилия грота соответственно связаны с датчиком угла поворота мачты и датчиком угла и скорости ветра, а выход блока оценки тягового усилия грота подключен к первому входу блока определения кренящего момента, первому входу блока определения приводящего момента, и первому входу блока определения циркуляции, второй вход которого соединен с датчиком угла и скорости ветра, который также подключен к второму входу блока определения кренящего момента, третий и четвертый входы которого соответственно присоединены к выходу блока определения приводящего момента и к выходу блока определения циркуляции, дополнительно введены датчик угла наклона мачты, датчик угла поворота корпуса доски, блок определения натяжения гибких тяг, коммутатор, серводвигатели, гибкие тяги, эластичные элементы, постоянный кольцевой магнит, закрепленный на днище корпуска доски, секционный кольцевой электромагнит, и блок управления сервод1аигателями, первый вход которого подключен к выходу блока определения кренящего момента, второй вход блока управления серводвигателями подсоединен к блоку определения натяжения гибких тяг, механически связанному с гибкими тягами, соединяющими через эластичные элементы серводвигатели и имитатор парусного вооружения, выход блока управления серводвигателями через первый вход коммутатора подключен к серводвигателям, второй, третий и четвертый входы коммутатора соответственно подсоединены, к датчику угла поворота мачты, датчику угла и скорости ветра и датчику угла поворота корпуса доски, который также подключен соответственно к второму входу блока определения приводящего момента, третьему входу блока определения циркуляции и второму входу блока имитации остойчивости, выход которого соединен с обмотками секционного кольцевого электромагнита, установленного жестко в горизонтальной плоскости под постоянным кольцевым магнитом, датчик угла наклона мачты подключен к третьему входу блока оценки тягового усилия грота, к третьему входу блока определения приводящего момента и четвертому входу блока определения циркуляции, при этом корпус доски установлен щарнирно на вертикальном валу, проходящем через центр секционного кольцевого электромагнита. На фиг. 1 показана функциональная схема тренажера; на фиг. 2 - эскиз тренажера, общий вид; на фиг. 3 - конструкция электромагнитной подвески; на фиг. 4 - то же, вид сверху.
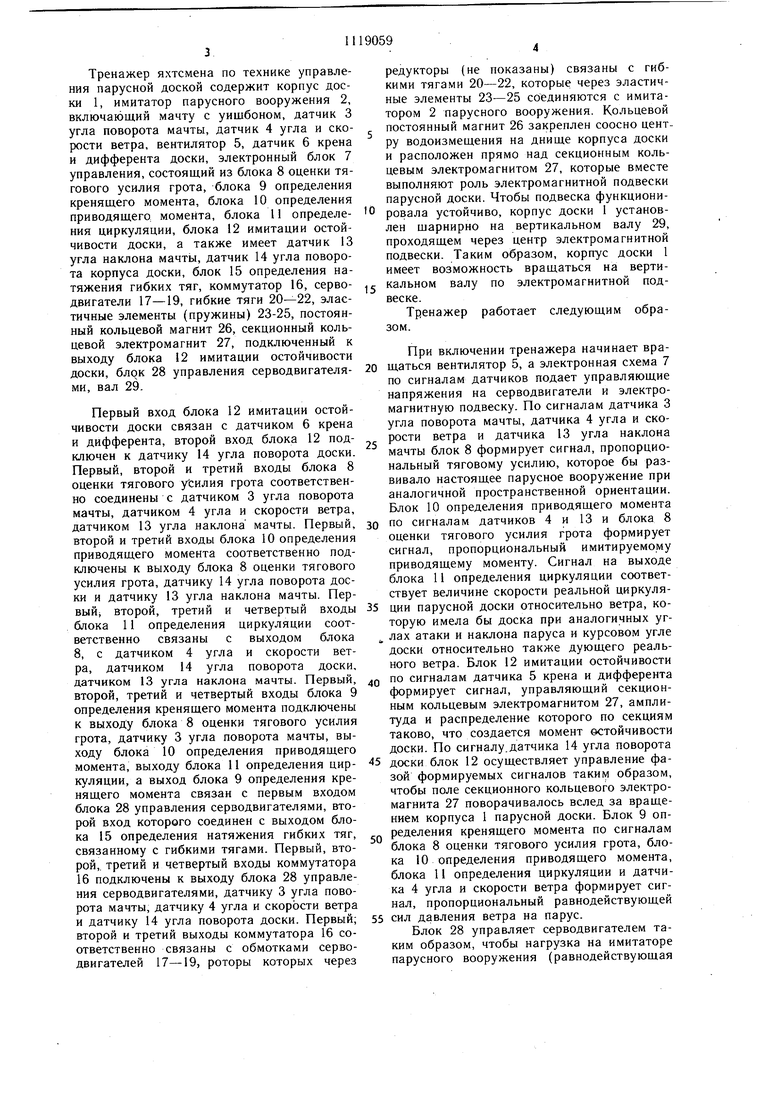
Тренажер яхтсмена по технике управления парусной доской содержит корпус доски 1, имитатор парусного вооружения 2, включающий мачту с уишбоном, датчик 3 угла поворота мачты, датчик 4 угла и скорости ветра, вентилятор 5, датчик 6 крена и дифферента доски, электронный блок 7 управления, состоящий из блока 8 оценки тягового усилия грота, блока 9 определения кренящего момента, блока 10 определения приводящего, момента, блока 11 определения циркуляции, блока 12 имитации остойчивости доски, а также имеет датчик 13 угла наклона мачты, датчик 14 угла поворота корпуса доски, блок 15 определения натяжения гибких тяг, коммутатор 16, серводвигатели 17-19, гибкие тяги 20-22, эластичные элементы (пружины) 23-25, постоянный кольцевой магнит 26, секционный кольцевой электромагнит 27, подключенный к выходу блока 12 имитации остойчивости доски, блок 28 управления серводвигателями, вал 29.
Первый вход блока 12 имитации остойчивости доски связан с датчиком 6 крена и дифферента, второй вход блока 12 подключен к датчику 14 угла поворота доски. Первый, второй и третий входы блока 8 оценки тягового усилия грота соответственно соединены с датчиком 3 угла поворота мачты, датчиком 4 угла и скорости ветра, датчиком 13 угла наклона мачты. Первый, второй и третий входы блока 10 определения приводящего момента соответственно подключены к выходу блока 8 оценки тягового усилия грота, датчику 14 угла поворота доски и датчику 13 угла наклона мачты. Первый; второй, третий и четвертый входы блока 11 определения циркуляции соответственно связаны с выходом блока 8, с датчиком 4 угла и скорости ветра, датчиком 14 угла поворота доски, датчиком 13 угла наклона мачты. Первый, второй, третий и четвертый входы блока 9 определения кренящего момента подключены к выходу блока 8 оценки тягового усилия грота, датчику 3 угла поворота мачты, выходу блока 10 определения приводящего момента, выходу блока 11 определения циркуляции, а выход блока 9 определения кренящего момента связан с первым входом блока 28 управления серводвигателями, второй вход которого соединен с выходом блока 15 определения натяжения гибких тяг, связанному с гибкими тягами. Первый, второй,, третий и четвертый входы коммутатора 16 подключены к выходу блока 28 управления серводвигателями, датчику 3 угла поворота мачты, датчику 4 угла и скорости ветра и датчику 14 угла поворота доски. Первый; второй и третий выходы коммутатора 16 соответственно связаны с обмотками серводвигателей 17-19, роторы которых через
редукторы (не показаны) связаны с гибкими тягами 20-22, которые через эластичные элементы 23-25 соединяются с имитатором 2 парусного вооружения. Кольцевой постоянный магнит 26 закреплен соосно центру водоизмещения на днище корпуса доски и расположен прямо над секционным кольцевым электромагнитом 27, которые вместе выполняют роль электромагнитной подвески парусной доски. Чтобы подвеска функциони0 ровала устойчиво, корпус доски 1 установлен щарнирно на вертикальном валу 29, проходящем через центр электромагнитной подвески. Таким образом, корпус доски 1 имеет возможность вращаться на верти5 кальном валу по электромагнитной подвеске.
Тренажер работает следующим образом.
При включении тренажера начинает вра0 щаться вентилятор 5, а электронная схема 7 по сигналам датчиков подает управляющие напряжения на серводвигатели и электромагнитную подвеску. По сигналам датчика 3 угла поворота мачты, датчика 4 угла и скорости ветра и датчика 13 угла наклона мачты блок 8 формирует сигнал, пропорциональный тяговому усилию, которое бы развивало настоящее парусное вооружение при аналогичной пространственной ориентации. Блок 10 определения приводящего момента
0 по сигналам датчиков 4 и 13 и блока 8 оценки тягового усилия грота формирует сигнал, пропорциональный имитируемому приводящему моменту. Сигнал на выходе блока 11 определения циркуляции соответствует величине скорости реальной циркуля5 ции парусной доски относительно ветра, которую имела бы доска при аналогичных уг... лах атаки и наклона паруса и курсовом угле доски относительно также дующего реального ветра. Блок 12 имитации остойчивости
по сигналам датчика 5 крена и дифферента формирует сигнал, управляющий секционным кольцевым электромагнитом 27, амплитуда и распределение которого по секциям таково, что создается момент остойчивости доски. По сигналу.датчика 14 угла поворота
5 доски блок 12 осуществляет управление фазой формируемых сигналов таким образом, чтобы поле секционного кольцевого электромагнита 27 поворачивалось вслед за вращением корпуса 1 парусной доски. Блок 9 определения кренящего момента по сигналам блока 8 оценки тягового усилия грота, блока 10 определения приводящего момента, блока 11 определения циркуляции и датчика 4 угла и скорости ветра формирует сигнал, пропорциональный равнодействующей
5 сил давления ветра на парус.
Блок 28 управляет серводвигателем таким образом, чтобы нагрузка на имитаторе парусного вооружения (равнодействующая
имитируемых сил давления ветра на парус), создаваемая гибкой тягой и эластичным элементом, соответствовала бы истинной, испытываемых в реальных условиях при аналогичном пространственном расположении парусной доски и ветра. Через блок 15 определения натяжения гибких тяг осуществляется контроль за величиной натяжения работающей в данный момент гибкой тяги, чтобы поддерживалось натяжение, определяемое сигналом блока 9. При наличии отклонения, сигнала блока 15 от величины, заданной блоком 9, блок 28 управления серводвигателями вырабатывает сигнал, устраняющий это рассогласование. Это связано с тем фактором, что парусное вооружение при управлении парусной доской описывает различные траектории внутри конуса, верщиной которого является щпор мачты (шарнир в месте крепления мачты, к/корпусу доски), и на разных курсах относительно ветра, когда угол атаки и пространственная ориента.ция парусного вооружения меняются, сила натяжения гибкой тяги может быть одинаковой. При этом серводвигатель либо стравит гибкую тягу, либо подберет. Ком.мутатор 16, сопоставляя соотношение сигналов датчика 14 угла поворота доски, датчика 4 угла и скорости ветра и датчика 3 угла поворота мачты, подключает к блоку 28 соответствующий серводвигатель 17, 18 или 19. Вентилятор 5 имеет возможность перемещаться в пределах небольщого сектора по направляющей.
Спортсмен дренируется на тренажере следующим образом.
Встав на корпус 1 доски, он балансирует, ощущая остойчивость корпуса, близкую к реальной. Подняв мачту имитатора 2 парусного вооружения и закручивая ее на ветер, спортсмен будет испытыва.ь нагрузки, схожие нагрузкам на галсе. При усилении ветра, отходах и заходах электронный блок 7 управления будет отрабатывать изменение нагрузок на имитаторе 2 парусного вооружения, -на которые яхтсмен должен активно реагировать, чтобы не упасть с корпуса доски. Для поворота оверщтаг яхтсмен приводит парусную доску к ветру, натяжение гибких тяг ослабевает, в соответствии с сигналом электронного блока 7 управления происходит переключение серводвигателей (17 на 18 или, наоборот, 19 на 17) и яхтсмен ставит парусную доску на новый галс. Для тренировки поворота фордевинд, например с левого галса курса бейдевинд, когда работа ет серводвигатель 17, спортсмен уваливает, коммутатор 16 подключает к блоку 28 серводвигатель 18. Увалив до курса фордевинд, яхтсмен вращает мачту против часовой стрелки (соверщает поворот относительно ветра).
0 При этом натяжение гибкой тяги 21, регулируемое электронным блоком 7 управления через электродвигатель, 18, ослабевает, а при «подборе паруса на ветер на новом галсе натяжение гибкой тяги 2 будет увеличиваться.
Таким образом, в тренажере по технике управления парусной доской корпус доски имеет возможность вращаться в горизонтальной плоскости с одновременной имитацией остойчивости, а силовые приводы с по0 мощью электроники позволяют создавать динамику реальных нагрузок на парусном вооружении.
По сравнению с базовым объектом-дощечкой, установленной в двух местах щарнирно на роликах, которую применяют для отработки балансировки и координации движений при помощи ног и корпуса спортсмена при подготовке яхтсмеров-досочников, предлагаемый тренажер обладает следующими преимуществами.
0 Корпус доски имеет остойчивость, близкую к реальной. Наличие имитатора парусного вооружения, позволяющего посредством силовых приводов и электроники воспроизводить в динамике нагрузки, близкие к реальным, дает возможность обучать навы5 кам управления, тренировать и отрабатывать реальные движения и нагружать необходимые группы мыщц. Позволяет тренировать повороты относительно ветра; оверщтаг и фордевинд, так как имитирует разворот
парусной доски, который осуществляется по траектории с центром в центре бокового сопротивления. Весь тренажер, в совокупности, позволяет воспроизводить условия тренировки, близкие к тренировке на воде, тем самым увеличивается качество подготовки
5 яхтсмена-досочника в осенне-зимний период, когда в силу климатических условий нельзя проводить тренировки на воде.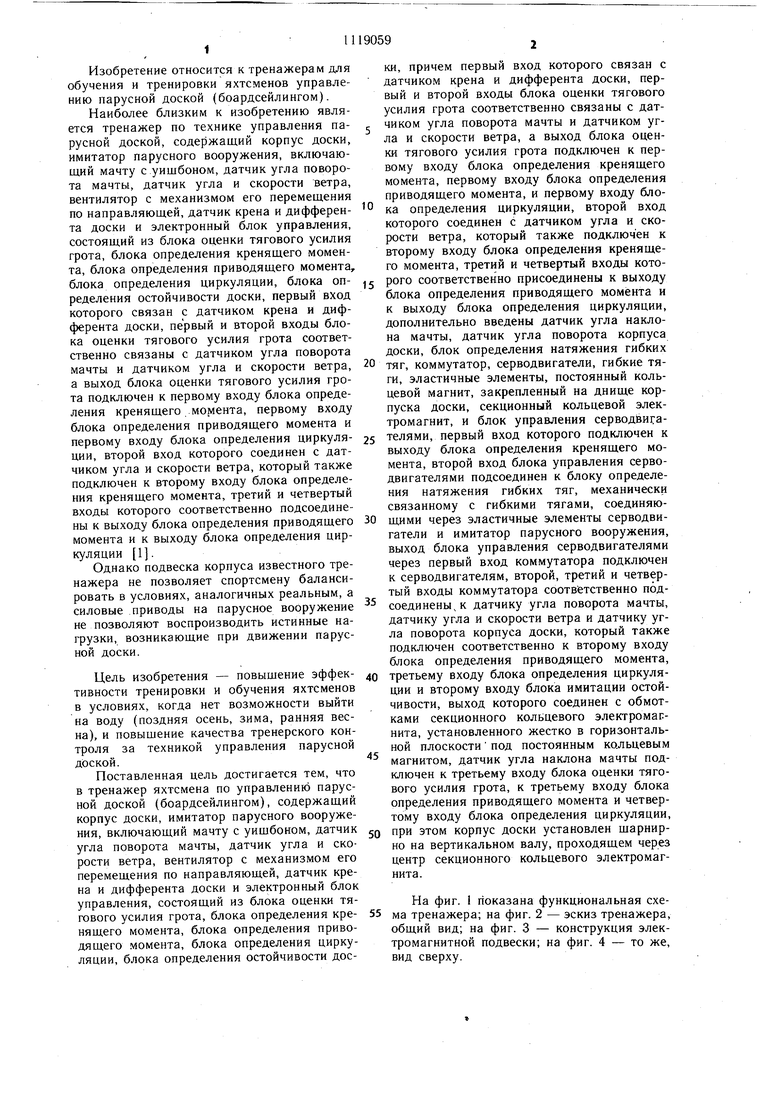
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер экипажа швертбота типа "Шлюп | 1980 |
|
SU995110A1 |
| Устройство для имитации приводящего момента швертбота | 1980 |
|
SU883951A1 |
| Тренажер рулевого швертбота типа КЭТ | 1979 |
|
SU947902A1 |
| ПАРУСНОЕ СУДНО | 2002 |
|
RU2265546C2 |
| Парусная доска | 1991 |
|
SU1794800A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОСТИ МАЧТЫ ПАРУСНОГО СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2145291C1 |
| Тренажер рулевого швербота | 1979 |
|
SU1029216A2 |
| Парусное вооружение | 1973 |
|
SU485034A1 |
| Парусное вооружение судна | 1979 |
|
SU906790A1 |
| Шпринтовое парусное вооружение | 1985 |
|
SU1318486A1 |
ТРЕНАЖЕР ЯХТСМЕНА ПО УПРАВЛЕНИЮ ПАРУСНОЙ ДОСКОЙ, содержащий корпус доски, имитатор парусного вооружения, включающий мачту с уищбоном, датчик угла поворота мачты, датчик угла и скорости ветра, вентилятор с механизмом его перемещения по направляю-, щей, датчик крена и дифферента доски и электронный блок управления, состоящий из блока оценки тягового усилия грота, блока определения кренящего момента, блока определения приводящего момента, блока определения циркуляции, блока определения остойчивости доски, первый вход которого связан с датчиком крена и дифферента доски, первый и второй входы блока оценки тягового усилия грота соответственно связаны с датчиком угла поворота мачты и датчиком угла и скорости ветра, а выход блока оценки тягового усилия грота подключен к первому входу блока определения кренящего мо.мента, первому входу, блока, определения приводящего момента и первому входу блока определения циркуляции, второй вход которого соединен с датчиком угла и скорости ветра, который также подключен к второму входу блока определения кренящего момента, третий и четвертый входы которого соответственно подсоединены к выходу блока определения приводящего момента и к выходу блока определения циркуляции, отличающийся тем, что, с целью повышения эффективности тренировки и обучения, в него дополнительно введены датчик угла наклона мачты, датчик угла поворота корпуса доски, блок определения натяжения гибких тяг, коммутатор, серводвигатели, гибкие тяги, эластичные элементы, постоянный кольцевой магнит, закрепленный на днище корпуса доски, секционный кольцевой электромагнит, блок управления серводвигателями, первый вход которого подключен к выходу блока определения кренящего момента, вто-, рой вход блока управления серводвигателями подсоединен к блоку определения натяжения гибких тяг, механически связанному с гибкими тягами, соединяющими через эласi тичные элементы серводвигатели и имитатор парусного вооружения, выход блока управСЛ ления серводвигателями через первый вход коммутатора подключен к серводвигателям, второй, третий и четвертый входы коммутатора, соответственно подсоединены к датчику угла поворота мачты, датчику угла и скорости ветра и датчику угла поворота корпуса доски, который также подключен соответственно к второму входу блока определения приводящего момента, третьему входу блока со определения циркуляции и второму входу блока имитации остойчивости, выход котоо рого соединен с обмотками секционного коль01 цевого электромагнита, установленного жест ко в горизонтальной плоскости под постоянным кольцевым магнитом, датчик угла наклона мачты подключен к третьему входу блока оценки тягового усилия грота,, к третьему входу блока определения приводящего момента и четвертому входу блока определения циркуляции, при этом корпус доски установлен шарнирно на вертикальном валу, проходящем через центр секционного кольцевого электромагнита. .
1в
Фиг. 2
/////////// ////V//////.
7777727
ЛЛМ/
7T&
24
18
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тренажер рулевого швертбота типа КЭТ | 1979 |
|
SU947902A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
