тор синхроимпульсов, выход которого соединен с соответствующими входами четвертого, пятого, второго и третьего блоков логики, первого компаратора, первого и второго блоков вычисления косинусов, первого и второго блоков определения угла курса, блока сравнения и блока уточнения галса, при этом выход первого регистра связан с соответствующим входом первого блока логики, выход блока определения координат судна соединен с соответствующими входами сумматора, блока вычисления арктангенса и первого блока логики, выход которого связан с задатчиком курса, связанного своим выходом с блоком сравнения, выход третьего блока логики соединен с соответствующими входами первого и второго блоков определения угла курса.
выход датчика положения руля связан с соответствующими входами четвертого блока логики, блока сравнения и аналогоцифрового преобразователя, выход датчика направления и скорости ветра соединен с соответствующими входами блока уточнения галса, четвертого блока логики, одиннадцатого компаратора и блока дискретизации значений входного сигнала, выход первого компаратора соединен с соответствующим входом блока уточнения галса, входы блока выработки сигнала точного подруливания связаны соответственно с выходами девятого и десятого компараторов, последний из которых соединен с блоком сигнализации, а один из входов аналого-цифрового преобразователя подключен к датчику крена.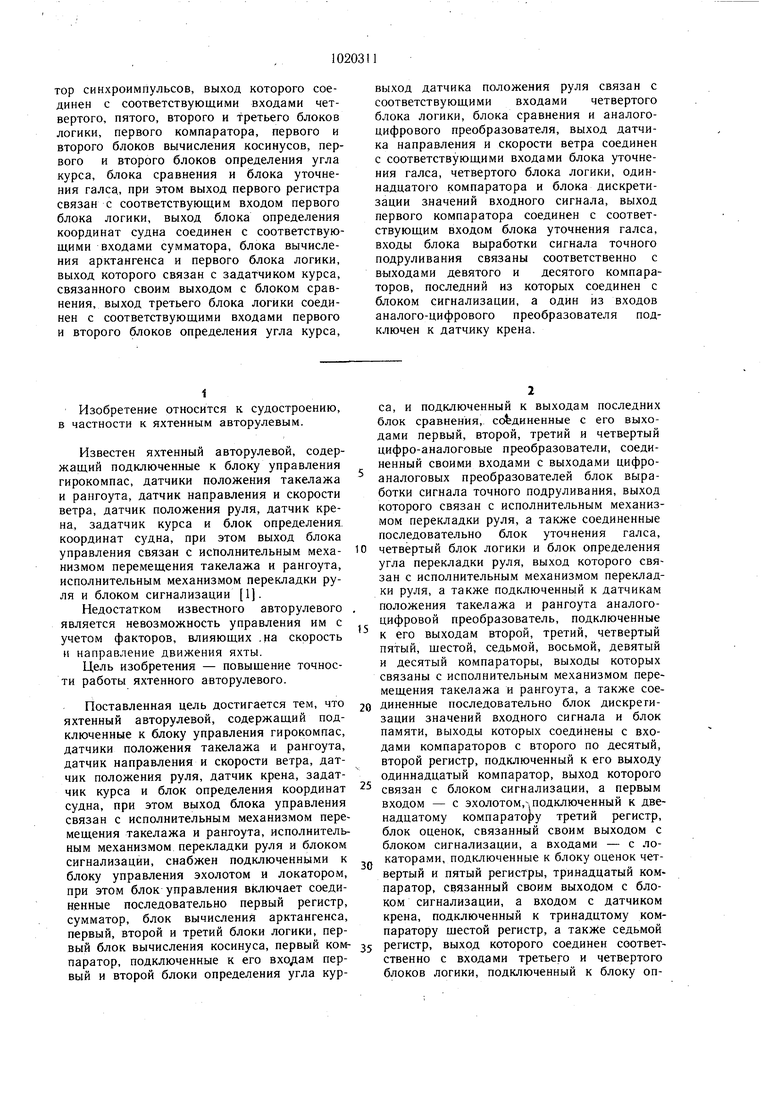
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер экипажа швертбота типа "Шлюп | 1980 |
|
SU995110A1 |
| Стенд для испытания движителей | 1980 |
|
SU953476A1 |
| ЯХТА | 2010 |
|
RU2426670C1 |
| Устройство для имитации приводящего момента швертбота | 1980 |
|
SU883951A1 |
| Тренажер рулевого швертбота типа КЭТ | 1979 |
|
SU947902A1 |
| Устройство для тренировки яхтсменов | 1980 |
|
SU960906A1 |
| Авторулевой | 1983 |
|
SU1093622A2 |
| Система управления ветроходом | 1983 |
|
SU1201802A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
ЯХТЕННЫЙ АВТОРУЛЕВОЙ, содержащий подключенные к блоку управления гирокомпас, датчики положения такелажа и рангоута, датчик направления и скорости ветра, датчик положения руля, датчик крена, задатчик курса и блок определения координат судна, при этом выход блока управления связан с исполнительным механизмом перемещения такелажа и рангоута, исполнительным механизмом перекладки руля и блоком сигнализации, отличающийся тем, что, с целью повышения точности его работы, он снабжен подключенными к блоку управления эхолотом и локатором, при этом блок управлеиия включает соединенные последовательно первый регистр, сумматор, блок вь1числения арктангенса, первый, второй и третий блоки логики, первый блок вычисления косинуса, первый компаратор, подключенные к его выходам первый и второй блоки определения угла курса, подключенный к выходам последних блок сравнения, соединенные с его выходами первь1Й, второй, третий и четвертый цифро-аналоговые преобразователи, соединенный своими входами с выходами цифро-аналоговых преобразователей блок выработки сигнала точного подруливания, выход которого связан с исполнительным механизмом перекладки руля, а также соединенные последовательно блок уточнения галса, четвертый блок логики и блок определения угла перекладки руля, выход которого связан с исполнительным механизмом перекладки руля, а также подключенный к датчикам положения такелажа и рангоута аналого-цифровой преобразователь, подключенные к его выходам второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый компараторы, выходы которых связаны с исполнительным механизмом перемещения такелажа и рангоута, а также соединенные последовательно блок дискретизации значений входного сигнала и блок памяти, выходы которых соединены с входами компараторов с второго по десятый, второй регистр, подключенный к его выходу одинi надцатый компаратор, выход которого связан с блоком сигнализации, двенадцатый (Л компаратор, связанный своим выходом с блоком сигнализации, а первым входом - с эхолотом, подключенный к двенадцатому компаратору третий регистр, блок оценок, связанный своим выходом с блоком сигнализации, а входами - с локаторами, подключенные к блоку оценок четвертый и пятый регистры, тринадцатый компаратор, связанный своим выходом с блоком сигнаto лизации, а входом с датчиком крена, подо оо ключенный к тринадцатому, компаратору шестой регистр, а также седьмой регистр, выход которого соединен соответственно с входами третьего и четвертого блоков логики, подключенный к блоку определения координат судна восьмой регистр, выход которого соединен соответственно с сумматором и первым блоком логики, подключенный своими входами соответственно к гирокомпасу и датчику направления и скорости ветра, пятый блок логики, выход которого соединен с входом второго блока логики, второй блок вычисления косинуса, вход которого связан с выходом третьего блока логики, а выход - с входом первого компаратора, и генера
i
Изобретение относится к судостроению, в частности к яхтенным авторулевым.
Известен яхтенный авторулевой, содержащий подключенные к блоку управления гирокомпас, датчики положения такелажа и рангоута, датчик направления и скорости ветра, датчик положения руля, датчик крена, задатчик курса и блок определения, координат судна, при этом выход блока управления связан с исполнительным механизмом перемещения такелажа и рангоута, исполнительным механизмом перекладки руля и блоком сигнализации 1.
Недостатком известного авторулевого является невозможность управления им с учетом факторов, влияющих .на скорость и направление движения яхты.
Цель изобретения - повыщение точности работы яхтенного авторулевого.
Поставленная цель достигается тем, что яхтенный авторулевой, содержащий подключенные к блоку управления гирокомпас, датчики положения такелажа и рангоута, датчик направления и скорости ветра, датчик положения руля, датчик крена, задатчик курса и блок определения координат судна, при этом выход блока управления связан с исполнительным механизмом перемещения такелажа и рангоута, исполнительным механизмом перекладки руля и блоком сигнализации, снабжен подключенными к блоку управления эхолотом и локатором, при этом блок управления включает соединенные последовательно первый регистр, сумматор, блок вычисления арктангенса, первый, второй и третий блоки логики, первый блок вычисления косинуса, первый компаратор, подключенные к его входам первый и второй блоки определения угла курса, и подключенный к выходам последних блок сравнения, соединенные с его выходами первый, второй, третий и четвертый цифро-аналоговые преобразователи, соединенный своими входами с выходами цифроаналоговых преобразователей блок выработки сигнала точного подруливания, выход которого связан с исполнительным механизмом перекладки руля, а также соединенные последовательно блок уточнения галса,
четвертый блок логики и блок определения угла перекладки руля, выход которого связан с исполнительным механизмом перекладки руля, а также подключенный к датчикам положения такелажа и рангоута аналогоцифровой преобразователь, подключенные к его выходам второй, третий, четвертый пятый, шестой, седьмой, восьмой, девятый и десятый компараторы, выходы которых связаны с исполнительным механизмом перемещения такелажа и рангоута, а также соединенные последовательно блок дискретизации значений входного сигнала и блок памяти, выходы которых соединены с входами компараторов с второго по десятый, второй регистр, подключенный к его выходу одиннадцатый компаратор, выход которого
связан с блоком сигнализации, а первым входом - с эхолотом,лподключенный к двенадцатому компаратору третий регистр, блок оценок, связанный своим выходом с блоком сигнализации, а входами - с локаторами, подключенные к блоку оценок четвертый и пятый регистры, тринадцатый компаратор, связанный своим выходом с блоком сигнализации, а входом с датчиком крена, подключенный к тринадцтому компаратору шестой регистр, а также седьмой
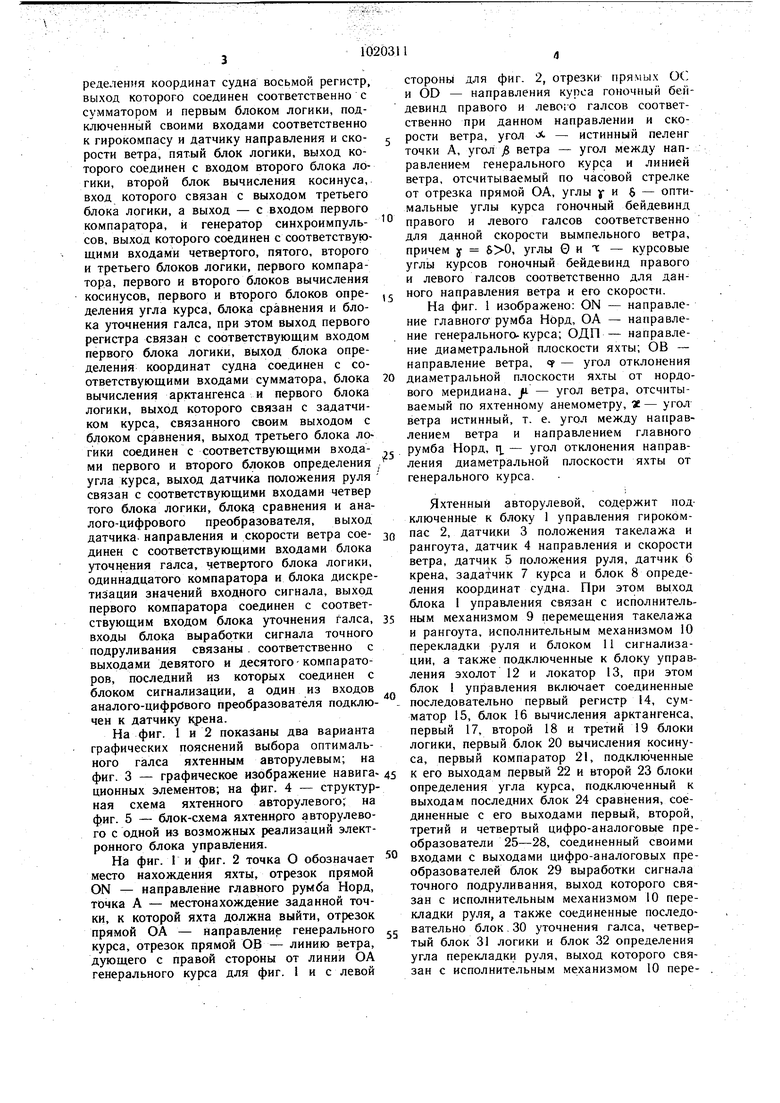
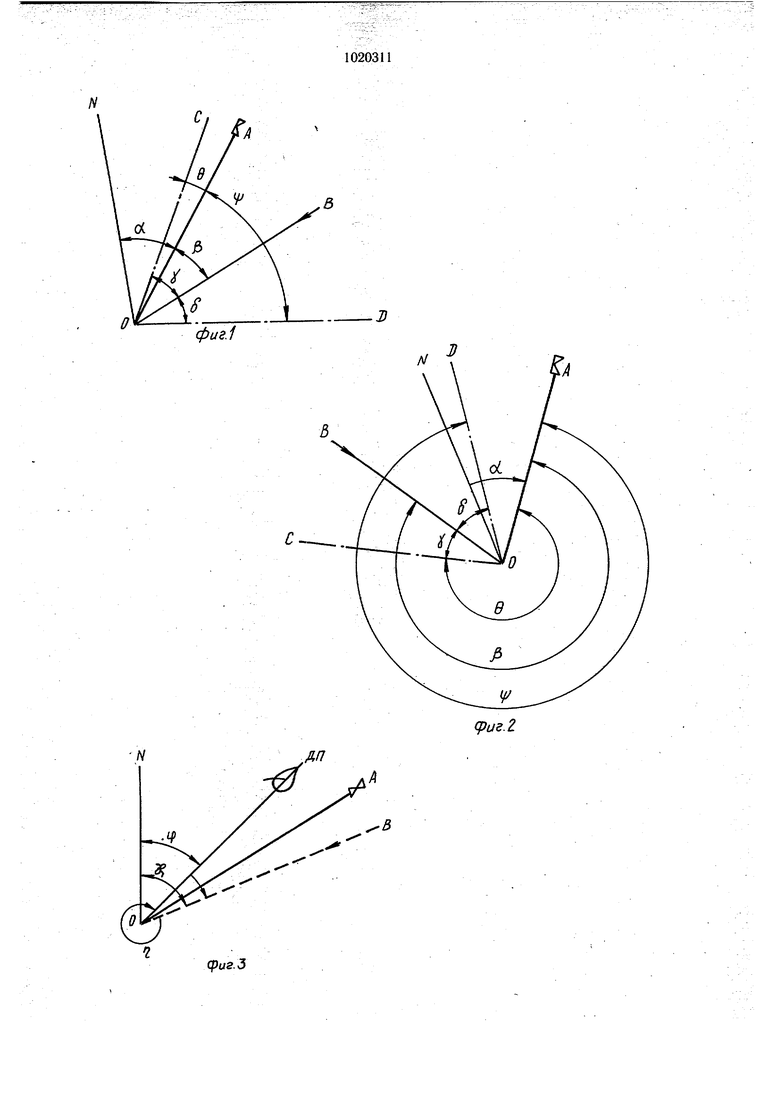
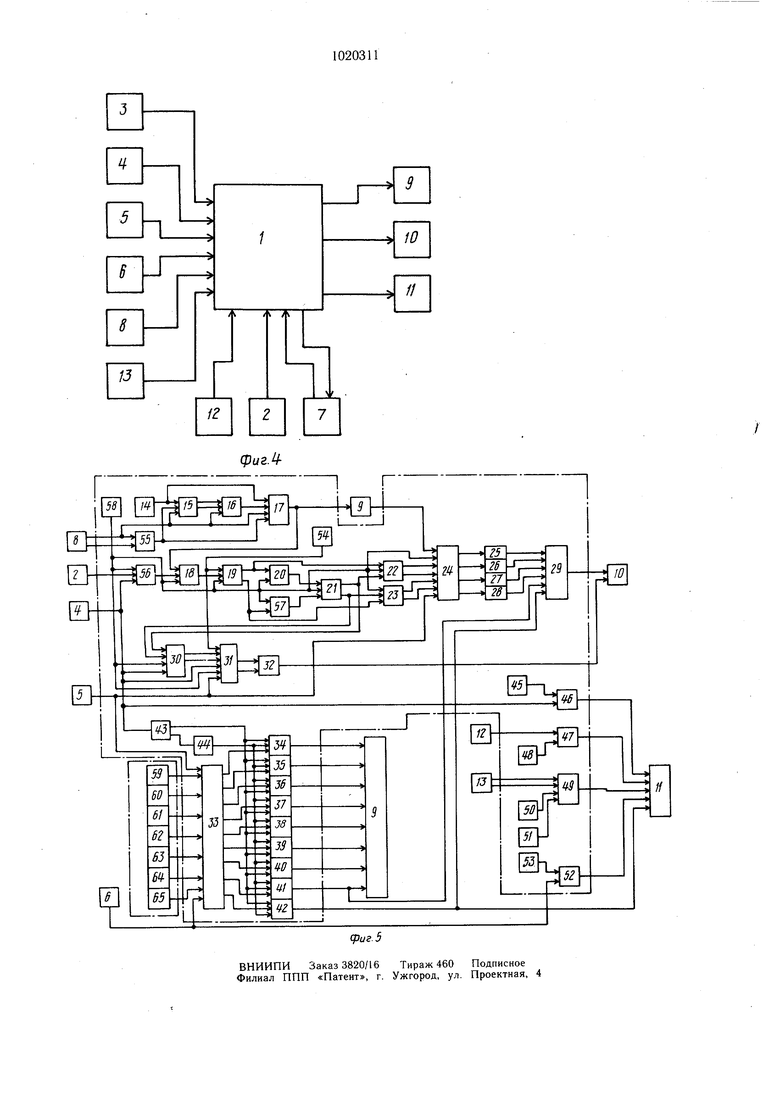
5 регистр, выход которого соединен соответственно с входами третьего и четвертого блоков логики, подключенный к блоку определення координат судна восьмой регистр, выход которого соединен соответственно с сумматором и первым блоком логики, подключенный своими входами соответственно к гирокомпасу и датчику направления и скорости ветра, пятый блок логики, выход которого соединен с входом второго блока логики, второй блок вычисления косинуса, вход которого связан с выходом третьего блока логики, а выход - с входом первого компаратора, и генератор синхроимпульсов, выход которого соединен с соответствук)щими входами четвертого, пятого, второго и третьего блоков логики, первого компаратора, первого и второго блоков вычисления косинусов, первого и второго блоков определения угла курса, блока сравнения и блока уточнения галса, при этом выход первого регистра связан с соответствующим входом первого блока логики, выход блока определения координат судна соединен с соответствующими входами сумматора, блока вычисления арктангенса и первого блока логики, выход которого связан с задатчиком курса, связанного своим выходом с блоком сравнения, выход третьего блока логики соединен с соответствующими входами первого и второго блоков определения угла курса, выход датчика положения руля связан с соответствующими входами четвер того блока логики, блока сравнения и аналого-цифрового преобразователя, выход датчика направления и скорости ветра соединен с соответствующими входами блока уточнения галса, четвертого блока логики, одиннадцатого компаратора и блока дискретизации значений входного сигнала, выход первого компаратора соединен с соответствующим входом блока уточнения галса, входы блока выработки сигнала точного подруливания связаны . соответственно с выходами девятого и десятого-компараторов, последний из которых соединен с блоком сигнализации, а один из входов аналого-цифрового преобразователя подключен к датчику крена. На фиг. 1 и 2 показаны два варианта графических пояснений выбора оптимального галса яхтенным авторулевым; на фиг. 3 - графическое изображение навигационных элементов; на фиг. 4 - структурная схема яхтенного авторулевого; на фиг. 5 - блок-схема яхтенирго авторулевого с одной из возможных реализаций электронного блока управления. На фиг. Г и фиг. 2 точка О обозначает место нахождения яхты, отрезок прямой ON - направление главного румба Норд, точка А - местонахождение заданной точки, к которой яхта должна выйти, отрезок прямой ОА - направление генерального курса, отрезок прямой ОВ - линию ветра, дующего с правой стороны от линии ОА генерального курса для фиг. 1 и с левой стороны для фиг. 2, отрезки прямых О( и OD - направления курса гоночный бейдевинд правого и левого галсов соответственно при данном направлении и скорости ветра, угол Jt - истинный пеленг точки А, угол j8 ветра - угол между направление-м генерального курса и линией ветра, отсчитываемый по часовой стрелке от отрезка прямой ОА, углы у и S оптимальные углы курса гоночный бейдевинд правого и левого галсов соответственно для данной скорости вымпельного ветра, причем у , углы 0 и t - курсовые углы курсов гоночный бейдевинд правого и левого галсов соответственно для данного направления ветра и его скорости. На фиг. 1 изображено: ON - направление главного румба Норд, ОА - направление генерального курса; ОДП- направление диаметральной плоскости яхты; ОВ - направление ветра, - угол отклонения диаметральной плоскости ях,ты от нордового меридиана, f - угол ветра, отсчитываемый по яхтенному анемометру, Ж - угол ветра истинный, т. е. угол между направлением ветра и направлением главного румба Норд, q - угол отклонения направления диаметральной плоскости яхты от генерального курса. Яхтенный авторулевой, содержит подключенные к блоку 1 управления гирокомпас 2, датчики 3 положения такелажа и рангоута, датчик 4 направления и скорости ветра, датчик 5 положения руля, датчик 6 крена, задатчик 7 курса и блок 8 определения координат судна. При этом выход блока 1 управления связан с исполнительным механизмом 9 перемещения такелажа и рангоута, исполнительным механизмом 10 перекладки руля и блоком 11 сигнализации, а также подключенные к блоку управления эхолот 12 и локатор 13, при этом блок 1 управления включает соединенные последовательно первый регистр 14, сумматор 15, блок 16 вычисления арктангенса, первый 17, второй 18 и третий 19 блоки логики, первый блок 20 вычисления косинуса, первый компаратор 21, подклк)ченные к его выходам первый 22 и второй 23 блоки определения угла курса, подключенный к выходам последних блок 24 сравнения, соединенные с его выходами первый, второй, третий и четвертый цифро-аналоговые преобразователи 25-28, соединенный своими входами с выходами цифро-аналоговых преобразователей блок 29 выработки сигнала точного подруливания, выход которого связан с исполнительным механизмом 10 перекладки руля, а также соединенные последовательно блок . 30 уточнения галса, четвертый блок 31 логики и блок 32 определения угла перекладки руля, выход которого связан с исполнительным механизмом 10 перекладки руля, а также подключенный к датчикам 3 положения такелажа и рангоута аналого-цифровой преобразователь 33, подключенные к его выходам второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый и десятый, компараторы 34- 42, выходы которых связаны с исполнительным механизмом 9 перемещения такелажа и рангоута, а также соединенные последовательно блок 43 дискретизации значений входного сигнала и блок 44 памяти, выходы которых соединены с входами компараторов 34-42 с второго по десятый, второй регистр 45, подключенный к его выходу одиннадцатый компаратор 46, выход которого связан с блоком 11 сигнализаци, двенадцатый компаратор 47, свя1анный своим выходом с блоком 11 сигнализации, а пер:.ым входом - с эхолотом 12, подключенный к двенадцатому компаратору 47 третий регистр 48, блок 49 оценок, свяSiiHHbm своим выходом с блоком 11 сигнализации, а входами - с регистрами 50 и 51 тринадцатый компаратор 52 связанный своим выходом с блоком 11 сигнали:;ации, а входом - с датчиком 6 крена, подключенный к тринадцатому компаратору 52 шестой регистр 53, а также седьмой регистр 54, выход которого соединен соответственно с входами третьего и четвертого блоков 19 и 31 логики, подключенный к блоку 8 определения координат судна восьмой регистр 55, выход которого соединен соответственно с сумматором 15 и первым блоком 17 логики, подключенный своими входами соответственно к гирокомпасу 2 и датчику 4 направления и скорости ветра пятый блок 56 логики, выход которого соединен с входом второго блока 18, логики, второй блок 57 вычисления косинуса, вход которого связан с выходом третьего блока 19 логики, а выход - с входом первого ком -атора 21, и генератор 58 синхроимпульu)i выход которого соединен с соответствующими в.юдами четвертого 31, пятого 56, второго 18 и третьего 19 блоков югики, первого компаратора 21, первого 20 и второго 57 блоков вычисления косинусов, первого и второго блоков 22 и 23 определения угла курса, блока 24 сравнения и блока 30 уточнения галса, при этом выход первого реги тра 14 связан с соответС1 1ующим входом первого блока 17 логики, выход блока 8 определения координат судна, ссгдинен с соответствующими входами сумматора 15, блока 16 вычисления арктангенса и первого блока 17 логики, выход которого связан с задатчиком 7 курса, связанного своим выходом с блоком 24 сравнения, выход третьего блока 19 логики соединен с сэответствующими входами лервого и второго блоков 22 и 23 определения угла курса, выход датчика 5 положения связан с соответствующими входами четвертого блока 31 логики, блока 24 сравнения и аналою-цифрового преобразователя 33, выход датчика : направления и скорости ветра соединен с соответствующими входами блока 3U уточнения галса, четвертого блок 31 логики, одиннадцатого компаратора 4Ь и блока 43 дискретизации значений входного сигнала, выход первого компаратора 21 соединен с соответствующим входом блока 30 уточнения галса, входы блока 29 выработки сигнала точного подруливания связаны соответственно с 1: 1ходами девятого и десятого компараторов 41 и 42, последний из которых соединен с блоком 11 сигнализации, а один из входов аналого-цифрового преобразователя 33 подключен к датчику 6 крена.
Стр; ктурные элементы схемы управления парусами приведены для яхты, вооруженной ремудс хим кэтом, т. е. имеющий один
треугольнкй парус, Ha3biBaeiv.bm гротом. В общем с;учае сложного парусного вооружения стр ктурное строение схе.мы управления парусами будет аналогичным схеме управления парусами кэта, увелич;:тся только ее громоздкость. В общем случае, для каждого паруса яхты нимается экспериментальная зависимость силы тяги Ej. силы дрейфа Рд, и приводящего момента М в функции от положения бегучего такелажа, угла крена, углов атаки парусов при кон0 кретных дискретных углах и скоростях ветра в диапазоне измерений углов и скоростей ветра. Значения положений и натяжений бегучего такелажа парусов и рангоута углов атаки парусов для оптимальных соотношений силы тяги и силы дрейфа при каждом конкретном значении угла и скорости ветра заносятся в соответстствующий регистр блока 44 памяти постановки парусов. Для бермудского кэта используются следующие датчики 3 положения такелажа и
0 рангоута: датчик 59 положения шкота шкотового угла грота, датчик 60 положения оттяжки . алсового угла грота, датчик 61 положения оттяжки передней шко- оричы грота, датчик 62 положения оттяжки гика, датчик 63 положения ползуна
погона гикч-щкотов, датчик 64 натяжения гика-шкотов, датчик 65 угла атаки гика.
Яхтенный авторулевой работает следующим образом.
Q Датчики 3 положения такелажа и рангоута преобразуют информацию о положении и натяжении ходовых концов бегучего такелажа парусов и углов поворота горизонтального рангоута парусов в электрические величины. Датчик 4 направления
5 и скорости ветра переводит информацию о направлении и скорости ветра в электрические сигналы. Датчик 5 положения руля вырабатывает электрический сигнал.
пропорциональный углу поворота руля относительно диаметральной плоскости яхты. Датчик 6 крена преобразует инфо1.мацию о продольном и поперечном крене яхты . электрический сигнал. Блок 8 определения координат вычисляет через определенные интервалы времени координаты яхты по береговым радиомаякам или L помощью навигационных искусственных спутников Земли. Локатор 13 преобразует информацию об окружающей надводной обстановке в районе нахождения яхты в изображение на электроннолучевую трубку и электрические сигналы, вводимые в блок. Эхолот 12 измеряет глубину водной среды в районе нахождения яхты.
Все перечисленные параметры вводятся в электронный блок 1 управления, который оценивает тяговые усилия парусов в зависимости от направления и скорости ветра, положения и натяжения ходовых концов бегучего такелажа парусов и углов поворота горизонтального рангоута, крена яхты, об; спечивает запись и хранение информации о координатах (Х,; (,) заданной точки, к которой необходимо выйти я.хте, вычисляет направление генерального курса по кратчайшему расстоянию до выщеуказанной точки от местонахождения яхты, определяет выгодный галс в зависимости от направления генерального курса и направления ветра, формирует управляющие сигналы для исполнительного механизма 10 перекладки руля, для исполнительного механизма 9 перемещений такелажа и рангоута, вырабатывает сигнал включения блока 11 сигнализации в случае возникновения различных ситуаций, рещение которых в блоке затруднено. Исходно в регистры за носится: в регистр 14 - координаты конечного пункта назначения Хр; в регистр 54 углы курсов гоночный бейдевинд у 5; в регистр 45 - максимальная скорость ветра, при которой может работать данный комплект парусов; в регистр 48 - минимальная возможная безопасная глубина; в регистр 50 - минимальное безопасное расстояние до препятствия; в регистр 51 - максимально допустимая радиальная скорость ближайщего препятсвия; в регистр 53 максимально допустимый крен, после превышения которого должна быть проведена смена парусов. После каждого определения местоположения -яхты блоком 8 по синхронному из блока 58 в регистр 55 заносятся текущие координаты Х,, YI, сумматор 15 вычисляет разность координат и YO-YI, блок 16 вычисляет угол а arctg L, причем 0 0°-180, блок 17 уточняет Лд до л 0 -360° следующим образом: сравниваются координаты Xi и Хо, и если Х,Хо, тоо{ сА, если X, Хо. то л о1.о -Ь 180°. По сигналу ас выставляется задатчик 7 курса. Сигнал равный углу
отклонения диаметральной плоскости яхты от нордового меридиант с гирокомпаса 2 i; г: гнал равный уг.ту етра с блока 4 подаются на блок 56, который зысчитывае истинный угол ветра: + и определяет зе:зе Хо-360° при и «-ас 3(Ю призе. 360°. Блок 18 высчитывает приведенный угол ветра j8 как у.ол .между линией ОА и ОВ: ;8о X - ли определяет ft fo при J3 360°-/Ло/ .
Блок 19 вычисляет курсовые углы гоночного бейдевинда для правого: Q fi-у и левого + & галсов. Блоки 20 и 57 вычисляют косинусы COS0 и cosf, и компаратор 21 оценивает соотношение cos© и COST. При появляется сигнал на выходе правого галса, а при cose cosY- на выходе левого галса компаратора 21. Этот сигнал (либо первый галс, либо левый галс) подается на блок 30, который коммутирует внутри себя канал правого либо левого галса, в зависимости от входного сигнала. При коммутации канала правого галса в блоке 30 происходит оценка угла ветра/ : при/ 180°-(360°-&) яхта находится на правом галсе, выходной сигнал отсутствует, при j4 180°-(360° -8) вырабатывается сигнал поворота на другой галс, при коммутации канала левого галсг в блоке 30 происходит оценка угла ветра J4: npHft Tf- 180° яхта находится на левом галсе, выходной сигнал отсутствует, при fi If- 180° яхта находится на правом галсе и вырабатывается сигнал поворота на другой галс. Этот сигнал через блок 31 уточнения галса поступает на блок 32 определения угла перекладки руля, который вырабатывает сигнал на исполнительный механизм 10 перекладки руля. При повороте яхты в блоке 31 происходит ера в нение угла ветра jw с углами курсов гоночного бейдевинда У либо S и приучу либо при (360° -f) бпроисходит отключение блока 32. В эти моменты времени яхта уваливает до курсов полнее курса гоночный бейдевинд. Сигнал о выбранном галсе с компаратора 21 поступает также на блоки 22 и 23 определения курсового угла правого и левого галса. При выбранном правом галсе включается блок 22, в котором анализируется надлежащий курсовой угол следуй щим образом.
На вход блока 22 также поступает курсовой угол©: выбирается курсовой угол хода яхты КУ1 360° -в, при 0 0° выбирается (в приведении к генеральному курсу iK). При выбранном левом галсе включается блок 23, на вход которого подается значение курсового угла ч-: при г 360°, выбирается КУЗ г - 360°, выбирается . В зависимости от выбранного курсового угла КУ1 КУ2, КУЗ, КУ4 появляется сигнал в цифро. , фг;рмс на одном из четырех выхддоь блоков 22 и 23. В G. 24 нализируется разность меж:i. iibiojjtiHiibiNi . )С()ВЬ.,,1 уг().-к)м КУ1,..., К- и утлом г от-:,1оиения диаметральной р |()ч:чОСТ1 яхты от л - .иа генерального курВ MCTtiipex каналах блока 24 опр делен Я рассогласования между выбранным ivVpcoM и реальным осуществляются операции: КУ1-ч; ()-п; КУЗ-я.; ()Ц, и сигналы расхождения поступают на цифро-аналоговые преобразователи 25-28, с которых сигнал подается на блок 29 выработки сигнала точного подруливапия, выход которого связан с исполнительным механизмом 9. Сигнал датчика 4 1юдается такх.е на блок 44, который дискретизируя скооость и угол ветра, выводит содержимое соответствующего регистра б.;1ока 44 на буферный регистр этого блока, а затем содержимое буферного регистра попадает на входы компараторов 34-42, па друг11е влоды которых через аналогоцифровой преобразователь 33 подается информация о состоянии датчиков 59-65, 5 и 6. Компараторы 34-40 параметров постановки парусов формируют выходные сигналы, равные разности текущих показателей датчиков 3 бегучего такелажа парусов I. рангоута и значений тех же параметров В 1веденпь Х на буферный регистр блока 36 памяти - остановки парусов. Комнаратор 41 формирует выходной сигнал, равный разности истинного и вычисленного значения угла поворот.: руля. Сигнал отклонения с к; мпаратиров 34-41 подается на исполнительный механизм 9, который регулировкой такелажа устраняет рассогласонание по выходам компараторов 34-41. Угол закладки руля, выведенный на буферный регистр блока 44 есть контрольный параметр, по которому судят о неисправности в системе авторулевого. Компаратор 52 при превышении скорости ветра, скорости, занесенной в регистр 45, включает блок 11 сигнализации. Компаратор 47 при уменьшении глубины до значения, занесенного в -регистр 48 включает блок 11 сигнализации. Компаратор о2 при превышении угла крена значения, занесенного в регистр 53, включает блок 11 сигнализации. Блок 49 включает блок 11 в следующих случаях: при появлении препятствия на курсе на расстоянии определенном регистро.м 50, при появлении препятствия, радиальная скорость (скорость сближения с яхтой) которого превышает значение, занесенное в регистр 51. В интервале времени между двумя вычислительными направлениями генерального курса ОА, операция определения выгодного галса и курсового ула, контроль за отклонением диаметральной плоскости яхты от направления вычисленного курсового угла, контроль за состоянием бегучего такелажа парусов и рангоута и углом закладки руля осуществляются циклически с периодом 0,1 сек, который обеспечивает генератор 58 синхроимпул viB, и в ависимости от значений перечисленных параметров происходит модуляция управляющих сигналов, подаваемых на исполнительные механизмы 9 и 10. Таким образом, при изменении скорости и угла ветра п пределах выгодного галса и в зависимости от угла крена через блок 1 осуществляемся подруливанйе и корректировка постановки парусов. При изменении угла ветра до такой величины, что галс становится невыгодным, управляющий сигнал с блока 1 поступает на исполнительный механизм 10 перекладки руля, осуществляя тем самым поворот на другой галс и одновременно испо.тнительный механизм 9 производит перерегулировку парусов на новом галсе. Применение предлагае.мого авторулевого позволяет обеспечить ;очног автоматическое управление яхтами с мягкими парусами, увеличивает скорость прохождения дистанции, дает возможность плавания на яхте даже в одиночку с выходом в открытое море и океан, снижает опасность платвания, позволяет проводить обучение начинающих яхтсменов и контроль за правильностью ведения яхты и выбором оптимального курса, правильностью положения парусов и рангоута.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3691978, кл | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
