Изобретение относится к-текстильной ПЕ5омыишенности и может быть использовано на ровничных машинах с подвесными рогульками.
Известен механизм привода- враще ния веретен с рогульками ровничной машины, содержа1ц 1й прутковый вал, /кинематически связанный с главным двигателем машины, датчик углового положения рогулек, электрически связанный- со вспомогательным электродвигателем, подсоединенным посредством муфты к прутковому валу, и средство для управления муфтой 13Однако данный механизм не позволяет производить автоматический откот ровницы с катушек перед их съемом для последую{йей заправки ее на пустые катушки, вследствие чего эти опера ции осуществляются вручную. Кроме . того, при фиксации рогулек на веретенах в заданном положении перед съемом катушек вспомогательный электродвигатель через пру ковый вал пе-. редает движение всем рабочим органам машины, что повышает ее энергозатраты, В данном механизме при пуске машины прутковый вал приводится от главного цвигателя во враще1 ие с. рабочей частотой, вследствие чего не обеспечи- .
зается надежная заправка ровнишд на .пустые катушки.
Целью изобретения является повышение удобств в обслуживании веретен за счет осуществления отматывания ровницы с катушек перед их оъемсх4 и повышение надежности заправки конца РОВНИЩ11 на пустую кату1аку.
Поставленная цель достигается тем,
10 что в механизме привода вра&ония веретен с рогульками ровничной машины, оодержгидем прутковый вал, кинематм- . чёски связ.анный с главным двигателем машины, датчик углового положения 15 р гулек, электрически связанный со вспомогательным, электродвигателем, присоединенным посредством муфты к прутковому валу, и средство для упт равления муфтой, муфта выполнена двух20сторонней, размещена на прутковом валу и включена в кинематическую связь пруткового вала с главным двигателем машины, при этом вспомогательный электродвигатель выполнен реверсив25ным.,
Датчик углового положения рогулек имеет флажок, установленный на одном из веретен машины, и бесконтактный выключатель, размещенный неподвижно
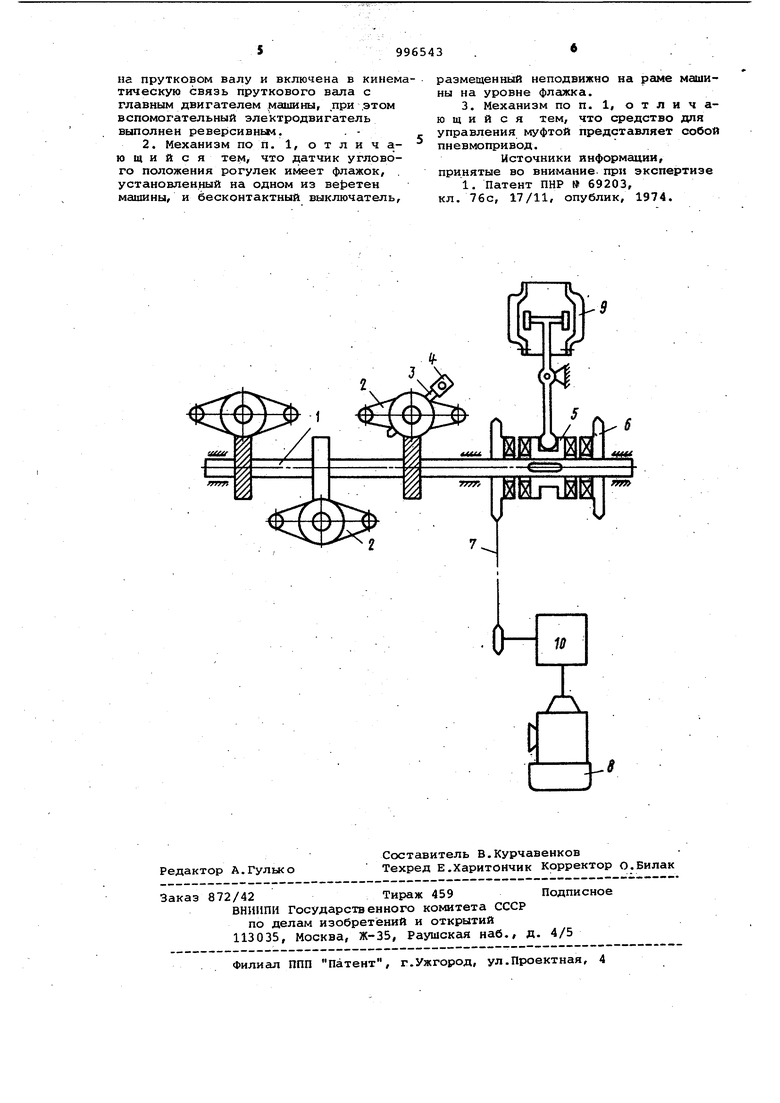
30 на раме маишны на уровне флажка. Средство для управления муфтой представляет собой пневмопривод. На чертеже изображена общая схема механизма. Механизм содержит прутковый вал для передачи вращения веретенам с рогульками 2. На одном из веретен установлен флс1жок 3 датчика угловог положения рогулек, представляющий собой пластину с двумя выступами, н детую на веретено. На раме машины на уровне флажка 3 неподвижно размещен бесконтактный выключатель 4. Прутковый вал 1 посредством двух сторонней муфты 5 и, например, цепн передач 6 и 7 кинематически связан с главным двигателем машины (не показан) и со вспомогательным элейтр двигателем 8, электрически связанны с датчиком углового положения рогулек. Муфта 5 размещена на прутковом валу 1 и имеет средство для ее управления, представляющее собой пнев мопривод 9. Вспомогательный электро двигатель выполнен реверсивным. В процессе наматывания ровницы на катушки ровничной машины вспомогательный электродвигатель отключен и передача вращения валу 1 осуществ ляется через муфту 5 от главного двигателя машины. Перед съемом катушек выключают главный двигатель машины и после Пол него останова ее нажимают на одну и кнопок управления, в результате чего включается электродвигатель 8 и пнев мопривод 9, который с помощью муфты 5 отключает прутковый вал с рогульками от главного привода машины и подключает его через редуктор 10 к электродвигателю 8. В результате, этого прутковый вал начинает вращат ся с небольшой частотой в противоположном направлении для отматывания ровницы с наработанных катушек. При этом остальные рабочие органы машины остаются неподвижными. Электросхема машины настроена на полуавтоматический режим работы: пока кнопка нажата, происходит непрерывная отмотка ровницы при визу альном контроле. После отпускания кнопки рогульки совершают доворот до фиксированного положения, при котором флажок 3 одним из своих выступов совмещается с бесконтактным выключателем 4. Последний подает сигнал на отключение электродвигателя 8 Бесконтактный выключатель типа КВП или КВД исключает механический контакт с флажком. Пневмопривод возвращает муфту в исходное положение. Фик сация рогулек в определенном положеНИИ необходима для осуществления замены наработанных катушек пустыми катушками. Полная длина отмотанного конца ровницы в каждом съеме складывается из длины, отмотанной при включенном электродвигателе 8, и длины, отмотанной при довороте рогулек. Таким образом может быть отмотана любая необходимая длина ровницы. Процесс отматывания ровницы может быть переведен и на автоматический . Для этого достаточно в схему управления ввести счетно-импульсное реле. В этом случае длина отматыва-емой ровницы определяется числом импульсов, возникающих при взаимодействии флажка с бесконтактным выключателем и заданных по счетно-импульному реле. Работа механизма в процессе заправки концов ровницы на пустые.катушки аналогична работе в процессе отмотки ровницы. Механизм включает-: ся в работу нажатием другой кнопки управления. Электродвигатель 8 сообщает вращение прутковому валу в противоположном отматыванию ровницы направлении с той же частотой и свисающие концы ровницы наматываются на пустые катушки. Наблюдение за процессом.заработки ровницы также визуальное: наматывание ровницы происходит до тех пор, пока кнопк а нажата. При этом бесконтактный выключа-тель4 отключен, т.е. фиксации рогулек в данном случае не требуется. Процесс заработки ровницы можно перевести на автоматический режим таким жепутем, как и процесс отматывания. После окончания обоих процессов включением кнопки управления главным приводом машина включается в работу. При этом бесконтактный выключатель не работает. Таким образом, предлагаемый механизм позволяет производить операции отматывания, заработки ровницы и фиксации рогулек в заданном положении перед снятием катушек, повысить надежность работы машины и снизить ее энергозатраты. Формула изобретения 1. Механизм привода вращения веретен с рогулькалда ровничной машины, содержащий пруткоилй вал, кинематически связанный с главным двигателем машины, датчик углового положения рогулек, электрически связанный со вспомогательным электродвигателем, подсоединенным посредством муфты к прутковому валу, и средство для управления муфтой, о т л и.ч а юи и с я тем, что,с целью повышеия удобств в обслуживании веретен а счет осуществления отматывания ровницы с катушек перед их съемом повышения надежности заправки конца ровницы на пустую каушку, муфта выполнена двухсторонней, размещена
на прутковом валу и включена в кинемтическую связь пруткового вала с главным двигателем машины, при .этом вспомогательный электродвигатель выполнен реверсивньм, . 2. Механизм по п. 1, о т л и ч аю щ и и с я тем, что датчик углового положения рогулек имеет флажок, . установленный на одном из веретен машины, и бесконтактный выключатель.
размещенный неподвижно на раме машины на уровне флажка.
3. Механизм по п. 1, отличающийся тем, что средство для управления муфтой представляет собой пневмопривод.
источники информации, принятые во внимание при экспертизе
1. Патент ПНР № 69203, кл. 7бс, 17/11, опублик, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОГО НАПУСКА РОВНИЦЫи ЗАВОДКИ в | 1969 |
|
SU234889A1 |
| Устройство для съема паковок с веретен текстильной машины | 1980 |
|
SU950820A1 |
| РОВНИЧНАЯ МАШИНА | 1966 |
|
SU183106A1 |
| РОВНИЧНАЯ МАШИНА | 1965 |
|
SU222912A1 |
| Устройство для управления крутильномотальным механизмом | 1976 |
|
SU565956A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ ЛЕНТЫ НА ЦИЛИНДРИЧЕСКИЕ КАТУШКИФондеишШ| | 1970 |
|
SU420712A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЗАВОДКИ ЗАМКА И ПЕРЕВОДА РЕМНЯ КОНОИДОВ РОВНИЧНОЙ МАШИНЫ ПОСЛЕ НАРАБОТКИ СЪЕМА В НАЧАЛЬНОЕ ПОЛОЖЕНИЕ | 1968 |
|
SU208485A1 |
| Устройство для управления крутильномотальным механизмом ровничной машины | 1977 |
|
SU699044A1 |
| РОВНИЧНАЯ МАШИНА | 1972 |
|
SU327273A1 |
| РОВНИЧНАЯ МАШИНАВСЕСОЮЗНАЯПАТЕНТШ-и:Х[ШНЕСМА11БИБЛИОТЕКА | 1971 |
|
SU318645A1 |
