(54) СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ГРЕБНЫХ ВИНТОВ 
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ВОДОМЕТНЫЙ | 2009 |
|
RU2436706C2 |
| Стенд для статической балансировки гребных винтов | 1973 |
|
SU540181A1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ГИДРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ГРЕБНОГО ВИНТА (ВАРИАНТЫ) | 2004 |
|
RU2281879C2 |
| ВИНТОДЕЙДВУДНОЕ УСТРОЙСТВО | 1983 |
|
SU1839924A2 |
| Гребной винт регулируемого шага | 2022 |
|
RU2792749C1 |
| ВИНТОДЕЙДВУДНОЕ УСТРОЙСТВО | 1982 |
|
SU1840297A1 |
| Стенд для испытания судовых дейдвудных устройств | 1985 |
|
SU1306810A1 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫЙ МОДУЛЬ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2017 |
|
RU2670341C1 |
| ПРОПУЛЬСИВНАЯ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2673207C1 |
| СПОСОБ БАЛАНСИРОВКИ ГРЕБНОГО ВИНТА | 2002 |
|
RU2248546C2 |
Изобретение относится к балансировочной технике и может быть применено в судостроении при изготовлении в ремонте гребных винтов. Известен способ статической балан сировки гребных винтов, заключающийся в том, что винт устанавливают на аэростатическую шайбу, размещенную на центрирующем шпинделе, центрируют гребной винт относительно центрируюii(ero шпинделя, в полость аэростатической шайбы подают сжатый воздух, который создает подъемную силу, ура новешивающую массу гребного винта, в результате чего аэростатическая шайба с гребным винтом имеет возможность перемещаться и поворачиваться в горизонтальной цлоскости, после .чего определяют дисбаланс винта, который устраняют удалением неурав повешенной массы с лопйсти винта 1. Наиболее близким по технической сущности к изобретению является способ статической балансировки гребных винтов, заключающийся в том, что оправку с винтом устанавливают I на ножевые опоры, измеряют дисба;ланс винта и устраняют его снятием или добавлением металла на ступицу винта Г2|. Недостатком способов является то, что они не учитывают разношаговость лопастей, вызывающую гидродинамическую неуравновешенность гребного винта, которая обусловливает возникновение знакопеременных нагрузок на подшипники дейдвудного устройства, главным образом на кормовой дейдвуДный подшипник, в связи с тем,что при различной величине шага лопастей равнодействующая создаваемого ими упора ,не совпадает с. осью винта, сместившись от нее в сторону лопастей, имеющих наибольший шаг, на некоторое расстояние, которое является плечом этой равнодействующей относительно оси, перпендикулярной оси винта и плоскости осевого сечения винта, в которой произоишо это смещение. Произведение величины равнодействующей (силы упора на это плечо дает момент, изгибгшщий гребной вал и вызывающий опорные реакции дейдвудных подшипников, создающих реактивный момент, равный по величине моменту силы упора и обратный ему по знаку.
Поскольку плоскость действия момента упора { равнодействующей упора всех лопастей строго фиксирована относительно лопастей винта, то при вращении винта воздействие этого момента на подшипники вала будет знакопеременным; продолжительность одного цикла возникающих нагрузок, а следовательно,.и реакции подшипников, в том числе и кормового дейдвудного, равна периоду t. времени одного оборота винта. Число же таких циклов равно числу оборотов гре.бного винта за соответствующий эксплуатационный период и выражается, например.за год числом в несколько десятков миллионов, 4TQ даже при ограниченной величине возникающих нагрузок способно существенно ускорить износ подшипников, в первую.очередь кормового дейдвудного, реакции которого являются наибольшими по абсолютной величине, что ухудшает условия работы дейдвудных устройств и снижает их надежность и долговечность.
Целью .изобретения является повышение надежности и долговечности дейдвудных устройств путем разгрузки кормового и носового дейдвудных подшипников.
Поставленная цель достигается тем что согласно способу статической балансировки гребных винтов, заключающемуся в том, что.оправку с винтом устанавливают на ножевые опоры, измеряют дисбаланс винта и устраняют, его,перед измерением дисбаланса винта определяют моменты упора его лопастей и координату и величину деба лансной массы, устраняющей реакцию о момента упора, устанавливают дебаланс ные грузы расчетной массы на концы соответствующих лопастей, а после устранения дисбаланса винта снимают с лопастей дебалансные грузы.
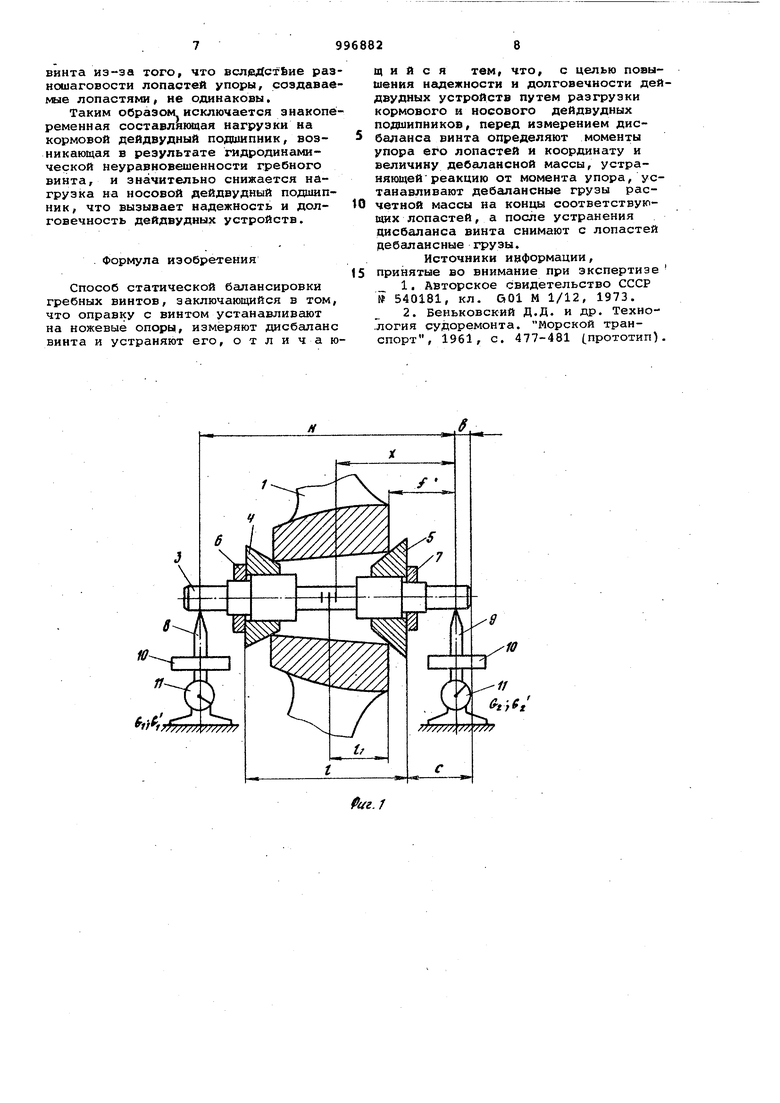
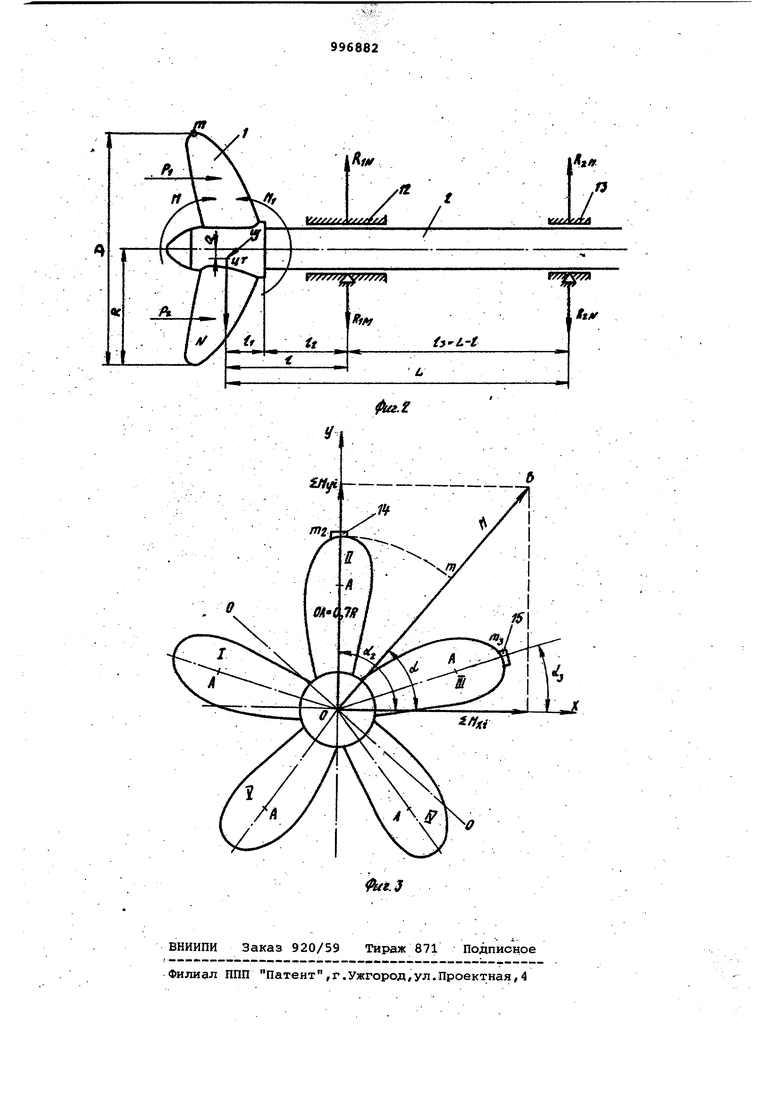
На фиг. 1 изображено устройство для определения массы винта и положения его центра тяжести (ЦТ) по оси ступицы) на фиг. 2 - схема установки винта и вала на судне с изображением сил, действующих на винт пр его вращении; на фиг. 3 - схема гребного винта для расчета момента упора лопастей, а также координаты и величины дебалансной массы.
Способ осуществляется следующим образом.
Гребной винт 1, полученный отливкой или другим путем, подвергается механической обработке - производится расточка отверстия под гребной вал 2, торцовка ступицы винта, обработка поверхности лопастей для обеспечения заданного шага. Шаг лопастей винта 1 при этом контролируется шаблонами, которые устанавливаются на сечениях, указанных в
.
чертеже, обмером лопастей или на специальном приспособлении для контроля шага винта. Перед контролем шага лопастей последнее нумеруют, например, цифровыми клеймами. Шаг лопасти должен-при этом находиться в пределах, установленных для винтов данного класса.
Помимо шага контролируются и другие параметры винта - диаметр, толщина лопастей, точность обработки ступицы, после чего определяют массу винта 1 и положение ЦТ винта 1 по оси ступицы, с помощью устройства, которое содержит оправку 3, центрирующие конусы 4 и 5, фиксирующие гайки б и 7, а также призматические опоры 8 и 9, которые установлены на грузовые площадки 10 весов 11. В зависимости от массы винта вместо весов 11 могут быть установлены динамометры .
Расстояние к между опорами 8 и 9 является постоянным.
Гребной винт 1 устанавливают на оправку 3 и через отверстие в ступице фиксируют на оправке 3 с помощью центрирующих конусов 4 и 5 и фиксирующих гаек & и 7. Затем всю эту систему устанавливают на призматические опоры 8 и 9 и фиксируют показания весов G. и G-if а. также
Ь - расстояние от правого торца оправки 3 до опоры 9; С - расстояние от правого торца оправки 9 до плоскост центрирующего конуса 5 ; расстояние между наружными плоскостями центрирующих конусов 4 и 5; f - расстояние от опоры S до плоскости переднего торца ступицы винта 1 .
Затем оправку 3 с установленным и зафиксированным на ней гребным винтом 1 снимают с опор 8 и 9, отворачивают фиксирующую гайку 7, сдвигают центрирующий конус 5 и снимают гребной винт 1 с оправки 3.
Затем центрирующий конус 5 и фиксирующую гайку .7 ставят в то же положение, какое они занимали при фиксировании на оправке 3 гребного винта 1 (выдерживают расстояние 2 ), после чего оправку 3 с конусами 4 и 5 и гайкаг ш б и 7 снова ставят на опоры 8 и 9, выдерживая расстояние Ь от правого торца оправки 3 до опоры 9. Фиксируют новые показания весов -й и Q, при этом масса . винта 1 равна
G,-4C.,4Q.)-eGVoi).
Положение ЦТ винта 1 по оси ступицы (например, расстояние Б от правого торца ступицы) определяют используя уравнение моментов на основании показаний весов(5,(,и ./зная расстояние .К между опорами и расстояние от опоры 9 до правого тор ца ступицы.
Определив расстояние расстояиие ЦТ винта от правого торца, замерами с места или по чертежу валопровода определяют расстояние Ст. от плоскости переднего торца ступицы винта до середины кормового дейдвудного подшипника 12, а также расстояние 6 между серединами кормового дейдвудного подшипника 12 и носового дейдвудного подшипника 13, а также расстояние I от ЦТ винта 1 до середины носового дейдвудного подшипника 13.
После этого приступают к статической балансировке гребного винта, ля чего определяют обшую условную ебалансную массуm по формуле
W1- ,. .
де (я - общая условная дебалансная масса, приложенная на радиусе R винта 1; М - момент суммарного упора .
всех лопастей относительно оси, перпендикулярной оси винта и плоскости действия . этого момента - оси 00; D - диаметр гребного винта ,1; . п - частота вращения гребного . - - . винта 1. .
Эта формула выведена следующим образом..
Допустим, что у гребного винта 1 (для простоты возьмем двухлопастный винт). - шаг лопастей составляет Н и Н, причем Н, 7 H-i.
При вращении винта 1 эти лопасти создают упоры Р и P,j , и для рассматриваемого случая (т.е. ) РХ| 7 Р.2. Как известно, упоры у лопастей винтов фиксированного шага при-. лагаются на расстоянии 0,7R от оси винта (в точках А). Разность упоров (их геометрическая сумма) создает на этом плече момент суммарного упора лопастей относительно оси, перпендикулярной оси винта и плоскости действия этого момента (в данном случае, плоскости чертежа).
Для компенсации воздействия этого момента (гидродинамической составляющей нагрузки) на дейдвудные подшипники 12 и 13 надо приложить к винту центробежную силу N. , (иЧСду))
. .
где G - масса винтаJ
V - окружная скорость вращения
ЦТ винта;
g - ускорение свободного падения тела
а - величина смещения ЦТ винта - от оси вращения в результате
дебаланса; п - частота вращения винта.
Момент М суммарного упора создает нагрузку на кормовой 12 и носовой 13 дейдвудные подшипники и реакции R.j(M) и «(м), причём максимальная часть нагрузки действует на кормовой подшипник. Разгрузить его можно реак цией от момента М
создаваемого
Ч
центробежной силой Н , вызванной искусственно созда.йным дебалансом винта 1.
Момент м можно уравновесить моментом mR, гдё R- радиус винта, m - Общая условная дебалансная масса, приложенная на радиусе винта R , , т.е. .
Отсюда .
5
Подставляя это значение CL полу1 г А «I.
чают
М
откуда / f
уу) - U -
. . 2DL1l.-V Определив по этой формуле общую условную дебалансную массу т, приложенную на радиусе R винта, определяют дебалансные массы
П1 rt и m-i
(см. фиг. 3,. позиции 14 и 15).
Раскладывают общую условную мае- су m на систему координат,.для чего вертикальную ось (ось у) сис0темы координат располагают по оси лопасти, имеющей наибольишй шаг.
Дебалансные .грузы 14 и 15 устанавливают на концы лопаст.ей II и И 1 после чего на этих же лопастях винта 1 устраняют материал масса удаляемого материала соответствует массе m, что обеспечивает уравновешивание винта 1 с дебалансными грузами 14 и 15, после этого снимают с лопастей I) и II дебалансные грузы 14 и 15, сообщая таким образом винту 1 дебаланс, необходигвлй для того, чтобы при вращении винта возникла центробежная сила N, разгружающая дейдвудные подшипники 12 и 13. Причем кормовой дейдвудный подшипник 12 полностью разгружается от знакопеременной составляющей, имеквдей причиной разношаговость винта 1. Нагрузка от этой составляющей носового подшипника 13 будет значительно уменьшена, вместе с тем «осовой подшипник 13 является менее нагруженным и, как правило, не определяет надежности и долговечности дейдвудного устройства.
При работе винта сообщенный ему искусственный дебаланс смещает ЦТ винта от его оси, вследствие чего от массы винта, приложенной с экс-. центриситетом относительно оси вр щения, возникает центробежная сила. Момент этой силы компенсирует момент, возникающий от равнодействующей упоров создаваемых лопастями, точка приложения которой смещена от оси
винта из-за того, что вслеДстбие разношаговости лопастей упоры, создаваемые лопастямиf не одинаковы.
Таким образом исключается знакопеременная составляющая нагрузки на кормовой дейдвудный подшипник, возникающая в результате гидродинамической неуравновешенности гребного винта, и значительно снижается нагрузка на носовой дейдвудный подшипник, что вызывает надежность и долговечность дейдвудных устройств.
Формула изобретения
Способ статической балансировки гребных винтов, заключающийся в том, что оправку с винтом устанавливают на ножевые опоры, измеряют дисбаланс винта и устраняют его, отличающийся тем, что, с целью повышения надежности и долговечности дейдвудных устройств путем разгрузки кормового и носового дейдвудных подааипников, перед измерением дисбаланса винта определяют моменты упора его лопастей и координату и величину дебалансной массы, устраняющей реакцию от момента упора, устанавливают дебалансные грузы расO четной массы на конда соответствующих лопастей, а после устранения дисбаланса винта снимают с лопастей дебалансные грузы.
Источники информации,
5 принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 540181, кл. G01 М 1/12, 1973.
