Изобретение относится к технике автоматического регулирования и предназначено для регулирования уровн воды в ирригационных каналах мелиоративных систем при помощи многопозиционных электроуправляемых затворов перегораживающих гидротехнических сооружений.
Известны дискретные широтно-импульсные авторегуляторы для мелиоративных систем, содержащие йуммирующий усилитель, интегрирующий усилитель и релейный блок, в которых выход суммирующего усилителя подключен к входу релейного блока, а выход интегрирующего усилителя подключен к второму входу суммирунвдего усилителя, причем для организации дискретного широтно-импульсного закона регулирования они содержат также блок стабилизации, представляющий собой RCреле времени t 1
Однако известные устройства характеризуются невысокой точностью и надежностью работы и значительным временем регулирования.
Наиболее близким по технической сущности к предложенному авторегулятору является дискретный широтноимпульсный авторегулятор для мелиоративных систем, содержащий суммирующий усилитель, инвертирующий усилитель, выход которого подключен к входу интегрирукадего усилителя с конденсатором и разрядной цепъю релейный блок с зоной нечувствительности и релейный усилитель, а также схему выделения модуля и КС-реле времени | 3 J.
10
Однако данный авторегулятор также обладает невысокой точностью и надежностью работы и значительным временем регулирования.
Низкая точность и надежность ра15боты известного авторегулятора объясняются тем, что уровень воды в ирригационных каналах подвергается действию волновых колебаний, пульсациям и всплескам с периодом, дости20гающим десятков секунд, и амплитудой до десятков сантиметров. В таких условиях в известном авторегуляторе вынуждены устанавливать величину зоны нечувствительности больше макси мальной величины амплитуды пульсаций, т.е. значительно снижать точность работы устройства, однако, поскольку на первый вход суммирукнцего усилителя подается пульсирукндий сигнал,
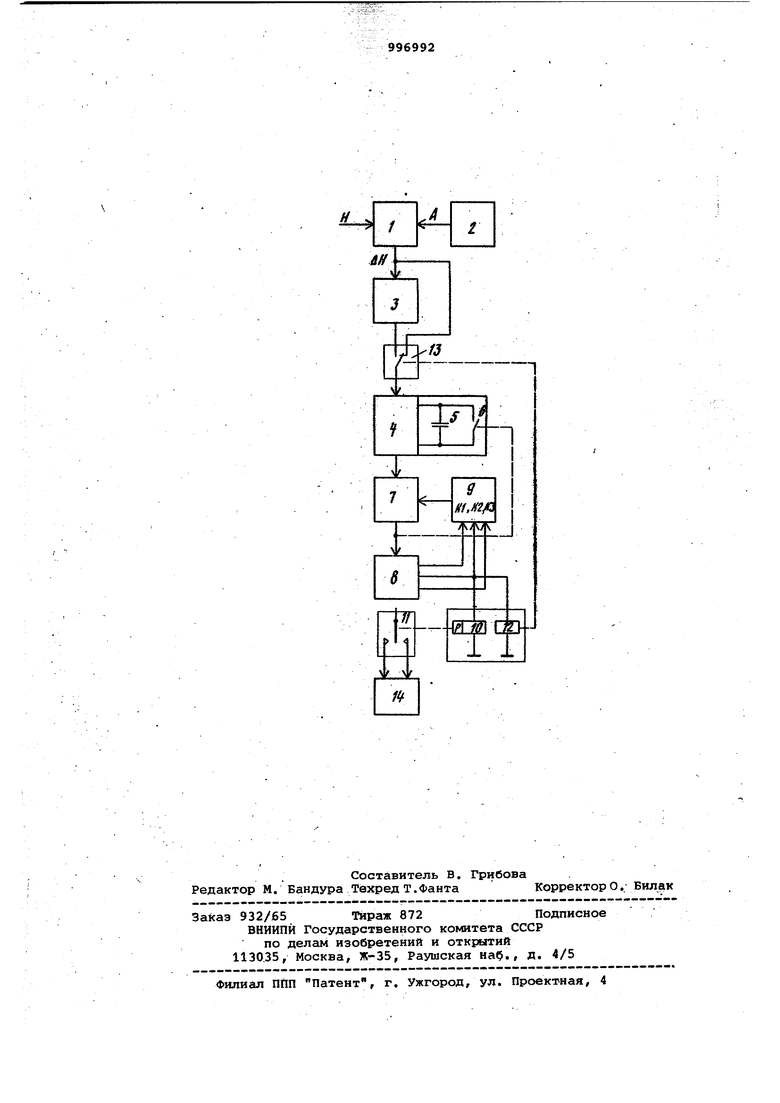
30 а на второй по входу - линейно возрастающее напряжение от интегрирующего усилителя, в суммирующем усилителе этот сигнал компенсируется не при действительном значении вели чины рассогласования, а при его минимальном значении в периоде колеба ний уровня, т.е. сразу после включе ния импульса. Таким образом, известный авторегулятор не может обес печить точность и надежность работы требуемые для автоматизации мелиора тивных систем, в условиях колебаний и пульсаций уровня воды в ирригацио ных каналах. Значительное время регулирования известного устройства объясняется .тем, что время паузы имеет фиксированную величину независимо от вел чины рассогласования, однако устано ленное время паузы является оптимальным только при минимсшьных значениях величины рассогласования, а при значительных величинах рассогла сования, т.е. при значительных упра ляющих воздействиях.авторегулятора на объект peгyлиpoвaния, изменение уровня происходит быстрее, установле ное время паузы оказывается слишком велико и поэтому время переходного процесса объекта значительно возрастает, что может привести.к перерегулированию и возникновению аварийных ситуаций, для предотвращения которых вынуждены на объектах вводит внешние связи, обеспечивающие непрерывный (релейный) режим регулирования при превышении заданного для конкретного объекта значения допусти мой величины рассогласования, что, значительно усложняя систему автоматического регулирования в целом, .не дает снижение времени регулирования. Целью изобретения является повыше ние точности и надежности работы уст ройства и снижение времени регулирования , Цель достигается тем, что в дискретный авторегулятор, содержащий последовательно соединенные задатчик измеритель рассогласования, инвертор, переключатель, интегратор с разрядной цепью, первое реле, подклю ченное выходом к интегратору с разрядной цепью, а также второе и треть реле, выходы которых подключены соот ветственно к входу объекта управления и к управляемомму входу переключателя, соединенного вторым информационным входом с выходом измерителя рассогласования, введены сдвигающий регистр и блок задания коэффициентов входы которого соединены с выходами сдвигающего регистра, а один из входов - с входами второго и третьего реле, а выход - с вторым входом первого реле, выход которого подключен к входу сдвигающего регистра. На чертеже изображена структурная схема предлагаемого авторегулятора. Схема содержит измеритель рассог.ласования 1, задатчик 2, инвертор 3, интегратор 4 с разрядной цепью, конденсатор 5, контакт б, управляемое реле 7-с зоной нечувствительности, кольцевой сдвигающий регистр 8, блок задания коэффициентов 9 и поляризованное реле 10 с переключающей группой контактов 11 с нейтральным положением, реле 12 с переключающей группой контактов 13, объект управления 14. Блок задания коэффициентов 9 содержит в общем случае не менее трех органов настройки К1, К2, КЗ, например переключателей или переменных резисторов, входы которых подключены, например, к источнику опорного напряжения, а выходы - через .элементы, коммутируемые сигналами с выходо.в кольцевого сдвигающего регистра 8, подключены к входу установки зоны нечувствительности реле 7 с зоной нечувствительности. Выходом авторегулятора является переключающая группа контактов 11 с нейтральным положением, к нормально разомкнуть1М контактам которой подклю-. чены соответствующие пускатели реверсивного электропривода затвора. Устройство работает следующим образом. На первый вход измерителя рассогласования 1 поступает сигнал о величине уровня воды в канале Н; а на второй вход - значение величины задания А от задатчика 2. Сигнал, пропорциональный величине ра-ссогласования между заданным и фактическим значением уровня воды в канале йН, поступает нормально замкнутый контакт в переключающей группе контактов 13 на вход интегратора 4, на выходе которого формируется линейно возрастающее напряжение, полярность и скорость нарастания которого пропорциональны величине ра.ссогласования йН. В исходном состоянии,- в кольцевом сдвигающем регистре 8 сигнал поступает на его первый выход и, следовательно, на второй вход реле 7 с зоной нечувствительности поступает опорный сигнал К1 с блока задания коэффициента 9, который определяет начальную зону нечувствительности реле 7 с зоной нечувствительности. При превышении напряжения на выходе интегратора 4 зоны нечувствительности реле 7 с зоной нечувствительности , величины, установленной опорным сигналом К1 от блока задания коэффициентов 9, реле 7 включается и включает ра,зрядную цепь конденсатора 5. Конденсатор 5 быстро разряжается, реле 7 с зоной нечувствительности отпускает , и поэтому на его выходе
формируется короткий импульс, который, поступая на вход кольцевого сдвигакицего регистра 8, вызывает сдвиг выходного сигнала с выхода первого на выход ВТОРОЙ. Этот сигнал поступает на реле 12 и поляризованное реле 10, Подвижный контакт в переключающей группе контактов 11 поляризованного реле 10 замыкает левый или правый (по схеме) -нормг льно разомкнутые контакты, подавая сигнал на соответствующий пускатель электропривода затвора, в.зависимости от полярности сигнала рассогласования, на подъем или опускание затвора. Подвижный контакт в переключающей группе контактов 13 реле 12 также пере-, ключается и подключает вход интегратора 4 к выходу инвертора 3, а на второй вход реле 7 с зоной нечувствительности поступает опорный сигнал К2 с блока задания коэффициентов 9. На этом заканчивается формирование задержки и начинается формирование импульса в цикле регулирования.
Инвертор 3 обеспечивает переворот фазы входного сигнала таким образом, что большему значению величины рассогласования ДН соответствует меньшее значение сигнала на выходе инвертора 3. Этот сигнал, поступая на вход интегратора 4, вызывает формирование на его выходе линейно возрастающего напряжения, скорость нарастания которого, таким образом, обратно пропорциональна величине рассогласования АН. При превышении напряжения на выходе интегратора 4 зоны нечувствительности реле 7 величины, установленной опорным сигналом К2 от блока задания коэффициентов 9, реле 7 с зоной нечувствительности включается и включает разрядную цепь ключом 6, конденсатор 5 быстро разряжается, реле 7 с зоной нечувствительности отпускает и на его выходе формируется второй короткий импульс, который, поступая на вход кольцевого сдвигающего регистра 8, вызывает сдвиг выходного сигнала с выхода второго на выход третий. Поляризованное реле 10 и реле 12 возвращают свои контакты в пере ключ группах контактов 11 и 13 в исходное состояние , перемещение затвора прекращается, а на вход реле 7 с зоной нечувствительности поступает опорный сигнал КЗ с блока задания коэффициентов 9. На этом заканчивается формирование импульса и начинается формирование паузы в цикле регулирования.
На вход интегратора 4 вновь поступает сигнал непосредственно с выхода измерителя рассогласования 1 и на выходе интегратора 4 формируется линейно нарастающее напряжение, скорость нарастания которого прямо пропорциональна величине рассогласования Н. При превышении напряжения на выходе интегратора 4 зоны нечувствительности реле 7 с зоной нечувствительности величины, установленной опорным сигналом КЗ от блока за Дания коэффициентов 9, реле 7 сзоной нечувствительности вновь включается и включает разрядную цепь ключом б, конденсатор 5 быстро разряжается, реле 7 с зоной нечувствительности отпускает и на его выходе формируется
0 третий корЬткий импульс, который, поступая на вход кольцевого сдвигающего регистра. 8, вызывает сдвиг выходного сигнала с выхода третьего вновь на выход первый и определяет,
5 возврат всей схемы в исходное состояние .
На этом заканчивается формирование паузы и всего цикла регулирова0ния. При наличии сигнала рассогласования АН на выходе измерителя рассогласования 1 цикл регулирования повторяется в том же порядке, а при отсутствии сигнала рассогласования схема авторегулятора находится в де5журном режиме.
При наличии колебаний и пульсаций уровня воды в канале, но при фактическом отсутствии рассогласования, амплитуды положительной и отрицатель0ной полуволн равны между собой, напряжение на выходе интегратора 4 за время полупериода колебаний не успевает достигнуть величины зоны нечувствительности реле 7 с зоной нечув5ствительности, установленной опорным сигналом К1 в блоке задания коэффициентов 9, и поэтому колебания и . пульсации уровня воды в канале не . вызывают ложных срабатываний авторе0гулятора и не оказывают влияние на работу авторегулятора. Во время действия импульса и паузы в цикле регулирования скорость нарастания выходного напряжения интегратора 4 меняется в такт с колебаниями и пуль5сациями уровня воды в канале, однако это так же не оказывает влияние на точность и надежность работы авторегулятора, поскольку средняя скорость нарастания выходного напряже-0ния интегратора 4 за период строго пропорциональна фактическому значению величины рассогласования. Таким I образом, даже при наличии колебаний и пульсаций уровня воды в канаше,
5 значительно превышающих зону нечувствител ности авторегулятора, обеспечивается практически неограниченная точность работы устройства, причем случайные всплески уровня воды
0 в канале также не оказывает влияние на надежность формирования цикла регулирования.
Цикл регулирования,, формируемый авторегулятором, образуется из трех . временных интервалов задержка.
5 импульс и пауза таким образом, что длительность импульса прямо пропорциональна, а длительности задержки и паузы обратно пропорциональны величине рассогласования Н и при максимальной величине .рассогласования в зоне регулирования дли тельность импульса имеет максималь ную,.а длительность задержки и па узы минимальные величины, определяемые установленными значениями коэффициентов К1-КЗ. в блоке задания коэф фициетов 9. Такой режим работы авторегулятора является наиболее оптимал ным для регулирования уровня воды в каналах мелиоративных систем, обес печивает значитель-ное снижение времени регулирования при повышении качества процесса регулирования и позволяет значительно повысить надежность функционирования всей системы автома.тического регулирования в цело При наличии несоответствия между параметрами настроек авторегулятора в цикле задержка, импульс и пауза при положительных и отрицатель™ ных.значениях величины рассогласования, что может иметь место на некото рых гидротехнических объектах, коли чество переменных коэффициентов в блоке задания коэффициентов 9 можно увеличить до шести, т.е. устанавливать различные значения параметров настроек авторегулятора в зависимости от полярности величины рассогласования, Экономическая эффективность предЛагаемого дискретного широтно-импуль сного авторегулятора для м елиоративньтх систем складывается из эконо1лии оросительной воды, достигаемой за счет повышения точности и надежноети работы устройства и за счет снилсения времени регулирования переходных процессов в ирригационных кана лах, а также из экономии затрат на из готовление, монтаж и обслуживание авторегулятора, благодаря исключению элементов и связей, повышения надежности и упрощения регулировки и настройк-и устрбйства при его изготовлении и эксплуатации. Формула изобретения Дискретный авторегулятор для мелиоративных систем, содержащий после довательно соединенные задатчик, измеритель рассогласования, инвертор, переключатель, интегратор с разрядной цепью, первое реле, подключенное выходом к интегратору с разрядной цепью, а также второе и третье реле, выходы которых подключены соответственно к входу объекта управления и к управляемому входу переключателя, соединенного вторым информационным входом с выходом измерителя рассогласования, отличающий ся тем, что, с целью повышения точности и надежности устройства, в него введены сдвигающий регистр и блок задания коэффициентов, входы которого соединены с выходами сдвигающего регистра , а один из входов - с входаьта второго и третьего реле, а выход с вторым входом первого реле, выход которого подключен к входу сдвигающего регистра. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 346711, кл, G 05 О 7/06, 1972., 2,Авторское свидетельство СССР №368586, кл. G 05 В 11/01, 1972. 3,Авторское свидетельство СССР № 4343/6, кл. G 05 В 11/28, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный авторегулятор для мелиоративных систем | 1980 |
|
SU926614A2 |
| Цифровой регулятор | 1979 |
|
SU930230A1 |
| ДИСКРЕТНЫЙ ШИРОТНО-ИМПУЛЬСНЫЙ АВТОРЕГУЛЯТОРФОНДS 'VJ | 1971 |
|
SU434376A1 |
| Устройство для дистанционного измерения и автоматического регулирования расхода воды в канале | 1989 |
|
SU1712786A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| Устройство группового управления активной мощностью гидроагрегатов | 1983 |
|
SU1201956A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Релейное управляющее устройство | 1981 |
|
SU1004965A1 |
| Релейная система автоматического регулирования | 1980 |
|
SU894668A1 |