(З) ЦИФРОВОЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тепловой защиты электродвигателя | 1987 |
|
SU1525801A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Система автоматического управления относительным обжатием прокатываемой полосы | 1980 |
|
SU931252A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Интегральный регулятор | 1982 |
|
SU1297007A1 |
| Устройство для компенсации зоны нечувствительности | 1988 |
|
SU1585780A2 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Устройство для регулирования температуры | 1980 |
|
SU907514A2 |
I
Изобретение относится к технике автоматического регулирования объектов с запаздыванием, регулируемая величина которых содержит случайную составляющую, и может быть использовано, например, для автоматического регулирования уровня воды с помощью электроуправляемых затворов гидротехнических сооружений на гидромелиоративных системах.
Известны дискретные авторегуляторы уровня воды, в состав которых входят электроконтактный датчик уровня воды, величина уставки (задание) устанавливается путем опускания или поднятия контгжтов датчика относительно поверхности воды, а зона нечувствительности регулятора т.е. зона, в пределах которой регулятор не реагирует на изменение регули руемой величины является постоянной и определяется расстоянием между электродами электроконтактного дат-чика. .
В таких регуляторах, во избежание ложных срабатываний за счет нерегулярных изменений уровня, используется .реле задержки, которое включает регулятор на отработку величины рассогласования только по прошествии определенного времени задержки 1 .
Однако такое устройство, являясь хорошей защитой от ложных срабатываний при действии внешней сосредоточенной во времени (импульсной) помехи, не обеспечивает защиты от помех типа шумов, обусловленных случайным изменением уровня воды, вызываемым, например, ветром или час.тым прохождением водного транспорта.
Наиболее близким по технический сущности к предлагаемому является ци/})ровой регулятор, содержащий за- датчик, исполнительное устройство и последовательно соединенные интегратор, датчик параметра, блок
рассогласования, преобразователь цифра - длительность импульса, блок программного управления,три выхода которого соединены с вторым, третьим и четвертым входами преобразователя цифра - длительность импульса соответственно, а выход задатчика соединен с вторым входом блока рассогласования 23.
Так как регулируемый процесс имеet транспортное запаздывание, вызываемое установкой датчика на расстоянии от гидротехнического сооружения, где уровень воды является установившимся, то постоянная интегрирования должна быть меньше длительности цикла регулирования на величину времени задержки. Практически,постоянная интегрирования не превышает 0,1 длитёльности цикла регулирования, ограничивая возможности интегратора, устанавливаемого на входе цифрового датчика. Таким образом, известные регуляторы имеют ограниченные возможности по снижению вероятности ложных срабатываний, вызываемых внеишей возмущающей силой, например, ветром, что является их недостатком. Низкая надежность работы известных регуляторов требует присутствия дежурного персонала на сооружении, в о§язанности которого входит отключение регулятора при возникновении аварийных ситуаций, что снижает технико-экономические показатели автоматизации.
Цель изобретения - повышение на дежности регулятора при регулировании объектов с запаздыванием, регулируемая величина которых содержит случайную составляющую.
Эта цель достигается тем, что цифровой регулятор содержит последовательно соединенные датчик случайной составляющей, измеритель-интегратор, блок-схему сравнения, первый элемент И и второй элемент И, первый вход которогосоединен с первым входом первого элемента И, второй вход с вторым входом первого элемента И и входом блока программного управления, третий вход - с третьим входом первого элемента И и третьим выходом блока программного управления, четвертый вход - с вторым выходом блока рассогласования, а выход - с первым входом исполнительного устройства, второй вход которого соединен с выходом первого элемента И, четвертый вход которого соединен с третьим
выходом блока рассогласования, первый выход которого соединен с вторым входом блока сравнения, управляющий вход измерителя-интегратора соединен с первым выходом блока программного управления двумя входами исполнительного устройства.
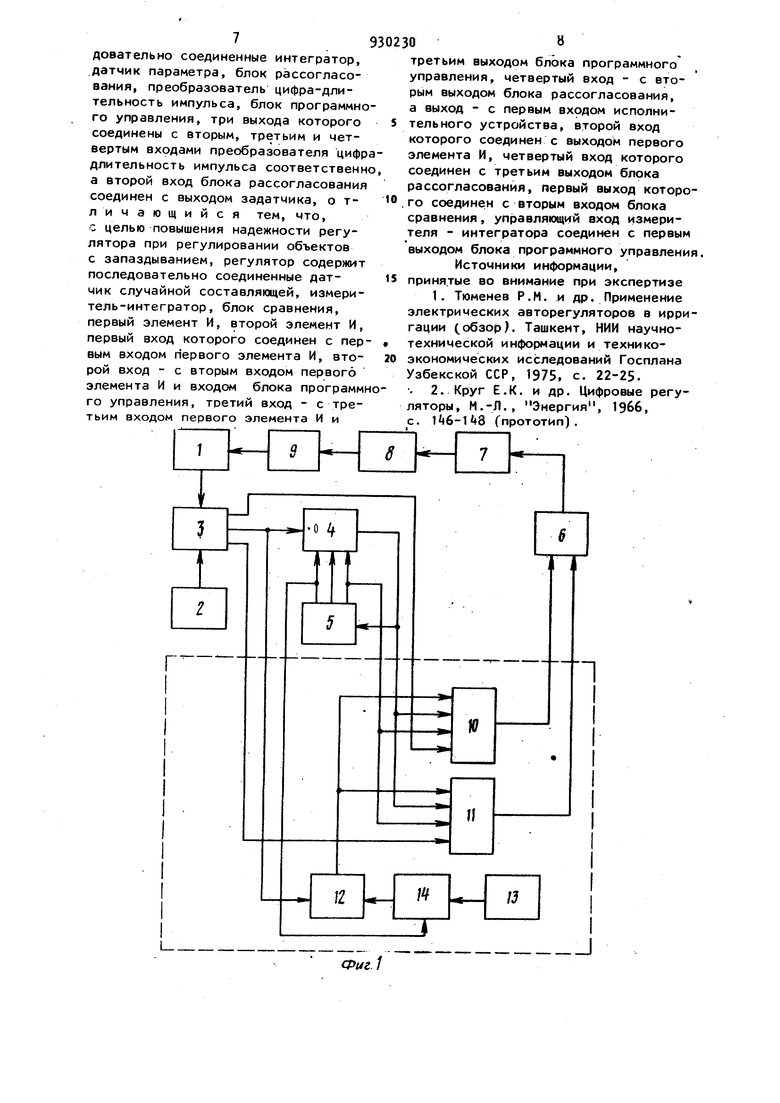
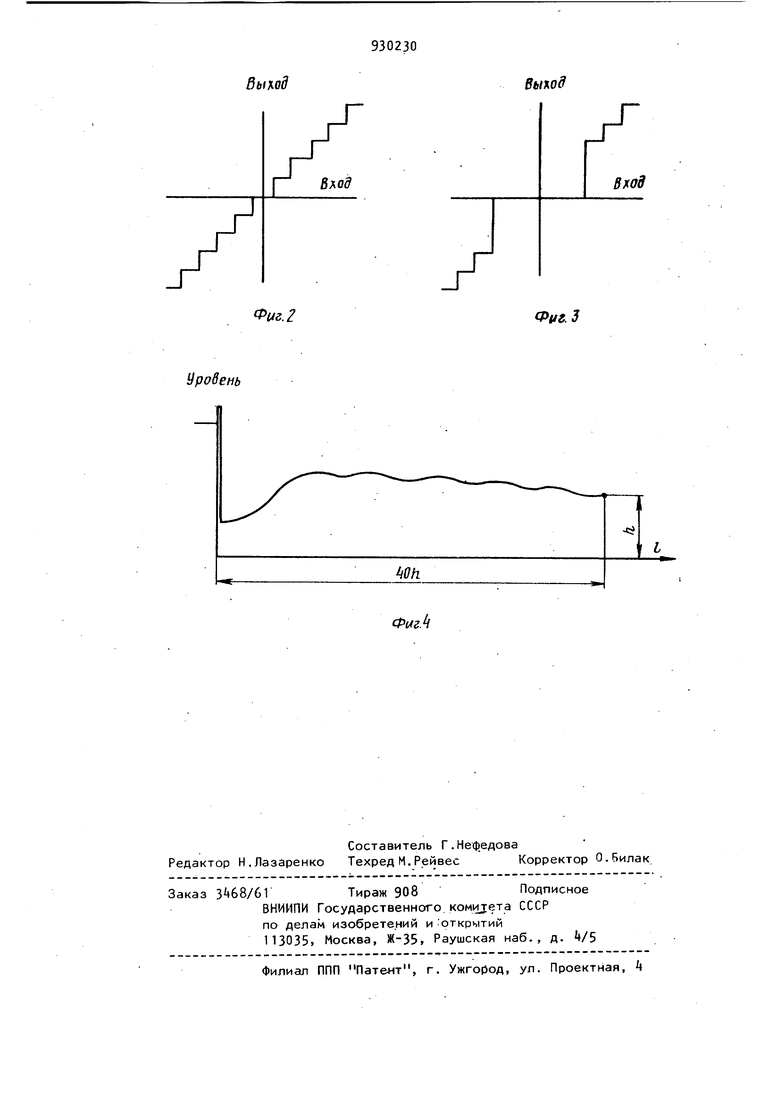
На фиг. 1 приведена блок-схема цифрового регулятора; на фиг. 2 и 3 характеристики вход-выход цифрового регулятора в отсутствие и при наличии блока управления зоной нечувствительност 1; на фиг. - схема установки датчика уровня относительно гидротехнического сооружения.
Цифровой регулятор содержит датчик 1 параметра и задатчик 2 регулируемой величины блок 3 рассогласования, преобразЪватель цифра-длительность управляющего импульса А,
блок 5 программного управления, исполнительное устройство 6, регулируемый орган 7 объекта 8 регулирования, интегратор 9, первый и второй
четырехвходовые элементы И 10 и 11, блок 12 сравнения, датчик 13 случайной составляющей регулируемой величины, измеритель-интегратор 14.
С выходов блока 1,2 и I снимается многоразрядный код.С первого выхода блока 3 также снимается многоразрядный код, с второго выхода блока 3 - сигнал отрицательного рассогласования, а с третьего выхода сигнал положительного рассогласования.
Блоки Ю-Н образуют блок управления зоной нечувствительности по среднеквадратическому отключению случайной составляющей регулируемой величины.
Регулятор работает следующим образом.
Длительность цикла регулирования Тц складывается из длительности паузы Tfj и длительности управляющего импульса t fi. Каждый цикл регулирования начинаетсяр отработки паузы блоком 5 программного управления, после чего с выхода блока 5 программного управления поступает импульс на
общий сброс цепей преобразователя цифра - длительность управляю1чего импульса и измерителя-интге;оатора I среднеквадратического отклонения случайной составляющей регулируемой величины. Затем от блока 5 программного управления с его выхода поступает импульс разрешения записи модуля величины рассогласования. полученного в блоке 3 рассогласования в преобразователь цифра - дли тельность управляющего импульса 4. После этого, с выхода блока 5 прогр много управления одновременно на преобразователь цифра-длительность управляющего импульса l и на третьи входы двух четырехвходовых элементов И 10 и 11 nocTynaeV сигнал на разрешение обработки рассогласовани Если при этом на выходе блока рассогласования имеется рассогласовани модуль которого превышает величину среднеквадратического отклонения случайной составляющей регулируемой величины, измеренной измерителеминтегратором 1, то на выходе блока 12 сравнения возникает сигнал, который одновременно присутствует на первых входах элементов И 10 и 16. Приэтом на вторых входах элементов И присутствует выходной сигнал преобразователя цифра - длительност управляющего импульса k. На четв,ертом входе сигнал присутствует лишь у того элемента И, который соответствует знаку рассогласования, т.е. при положительной величине рассогла сования сигнал присутствует на четвертом входе элемента И 10, в проТФ1ВНОМ случае - на четвертом входе элемента И 11. Таким образом, при н личии рассогласования, превышающего измеренное среднеквадратическое отклонение случайной составляющей регулируемой величины, например уро ня воды, на выходе одного из элементов И,10 или 11 возникает импульс, длительность которого пропор циональна модулю величины рассогласования. Этот импульс поступает на один из входов исполнительного . устройства 6 и действует в одном из двух направлений пеоемешения регули емого органа 7 - Подъем или Опус кание. Если модуль величины рассогласования меньше среднеквадратического отклонения слуг«айной составлящей регулируемой величины, то на выходе блока 12 сравнения сигнал равен нулю и на выходах элементов И 10 и сигнал также равен нулю. Следовательно зрна нечувствительности регу лятора управляется величиной средне квадратического отклонения случай ной составляющей регулируемой «еличины, что предотвращает ложные срабатывания регулятора, обусловленные действиями внешних помех, Т апример ветра. Это повышает надежность регулятора и позволяет исключить присутствие- обслуживающего персонала на гидротехническом сооружении для отключения регулятора на время возникновения ветра. Величина постоянной интегрирования измерителя-интегратора 1 случайной составляющей регулируемой величины, например уровня воды, всегда больше величины постоянной интегрирования интегратора 9 установленного на входе датчика 1 параметра. Для подтверждения этого обратимся к фиг.4, на которой показано место установки датчика 1 параметра регулятора. Датчик пара- метра 1 устанавливается на расстояние 0 от сооружения, где it - уровень воды считае- ся установившимся . . Время добегания fi - уровень воды в месте установки датчика уровня; V - средняя скорость потока. Временем добегания и величиной постоянной интегрирования определяется длительность паузы в цикле регулирования. Так ка интегрирование начинается с момента добегания из ененного значе мя уровня, то длительность паузы определяемся суммой времени добегания t..jc времени интегрирования Tц,т Тп ОБ+ МНТ Время интегрирования измерителяинтегратора Jk Т равно длитель ности паузл Т|«тгн)«р Т. Поэтому мит мгм выполняется всегда . На практике принимают Т цнт 0,1 Тдоб и Tv«4TM e I.TAOF. Полное время цикла регулирования равно .Тц - Т„ Ь1Ч:АоЕ+-Ьуп На фиг.З видно, что ширина зоны нечувствительности, определяемая среднеквадрат ческим отклонением случайной составляющей уровня, расширяется с увеличением помех. При отсутствии помех регулятор имеет характеристж у вход-выход, изображенную на фиг.2. Формула изобретения . Цифровой регулятор, содержащий исполнительное устройство и последовательно соединенные интегратор, датчик параметра, блок рассогласования, преобразователь цифра-длительность импульса, блок программно го управления, три выхода которого соединены с вторым, третьим и четвертым входами преобразователя цифр длительность импульса соответственн а второй вход блока рассогласования соединен с выходом задатчика, о тличающийся тем, что, с целью повышения надежности регулятора при регулировании объектов с запаздыванием, регулятор содержит последовательно соединенные датчик случайной составляющей, измеритель-интегратор, блок сравнения, первый элемент И, второй элемент И, первый вход которого соединен с пер вым входом первого элемента И, второй вход - с вторым входом первого элемента И и входом блока программ го управления, третий вход - с третьим входом первого элемента И и
Фиг.1 0 третьим выходом блока программного управления, четвертый вход - с вторь1м выходом блока рассогласования, а выход - с первым входом исполнительного устройства, второй вход которого соединен с выходом первого элемента И, четвертый вход которого соединен с третьим выходом блока рассогласования, первый выход которого соединен с вторым входом блока сравнения, управляющий вход измерителя - интегратора соединен с первым выходом блока программного управления. Источники информации, принятые во внимание при экспертизе 1.Тюменев P.M. и др. Применение электрических авторегуляторов в ирригации (обзор). Ташкент, НИИ научнотехнической информации и техникоэкономических исследований Госплана Узбекской ССР, 1975. с. 22-25. 2.Круг Е.К. и др. Цифровые регуляторы, М.-Л., Энергия, 1966, с. IjS-l S (прототип).
Вы}(одВымд
В}(од
Фиг. 2
Фtfг.3
