В предлагаемом изобретении, касающемся самодвижущихся повозок, снабженных цилиндрическими упругими катками, последние получают движение помощью гибкой ленты от жестких катков.
На схематическом чертеже фиг. 1, 2, 3, 4 и 5 - изображают вид сбоку предлагаемой повозки (пять вариантов); фиг. 6 - вид повозки сверху (несколько видоизмененная форма выполнения пятого варианта); фиг. 7 - деталь повозки.
Получающие движение от мотора жесткие катки ж, ж … передают нагрузку на упругие катки у, у и приводят их во вращение, либо непосредственно, либо помощью гибкой ленты с ребристой поверхностью, охватывающей жесткие или упругие катки (фиг. 1, 2, 3 и 5), при чем последние могут быть также снабжены ребристой поверхностью.
Схема устройства повозки, изображенная на фиг. 4 (два неупругих катка ж, ж нажимают изнутри на полый упругий цилиндр У), не отличается от схемы известной гусеницы. Вместо сплошной гибкой ленты может быть применено несколько - из пружинной стали (фиг. 6).
Предлагается несколько форм выполнения упругих катков:
В виде цилиндрической поверхности, образованной взаимным соединением помощью заклепок кольцевых и прямоленейных пружинных полос, образующих решетку, изображенную фиг. 7, где А - продольные кольцевые пружины, В - плоские поперечные пружины, предназначенные для связи кольцевых. В виде наполненной под давлением воздухом или водой резиновой камеры, заключенной в цилиндрическую покрышку, которая может быть кожаной с нашитыми полосками толстой кожи для получения ребристой поверхности либо из армированной резины, либо из металлической кольчуги, в виде пучка надутых воздухом резиновых трубок, окруженных гибким ободом.
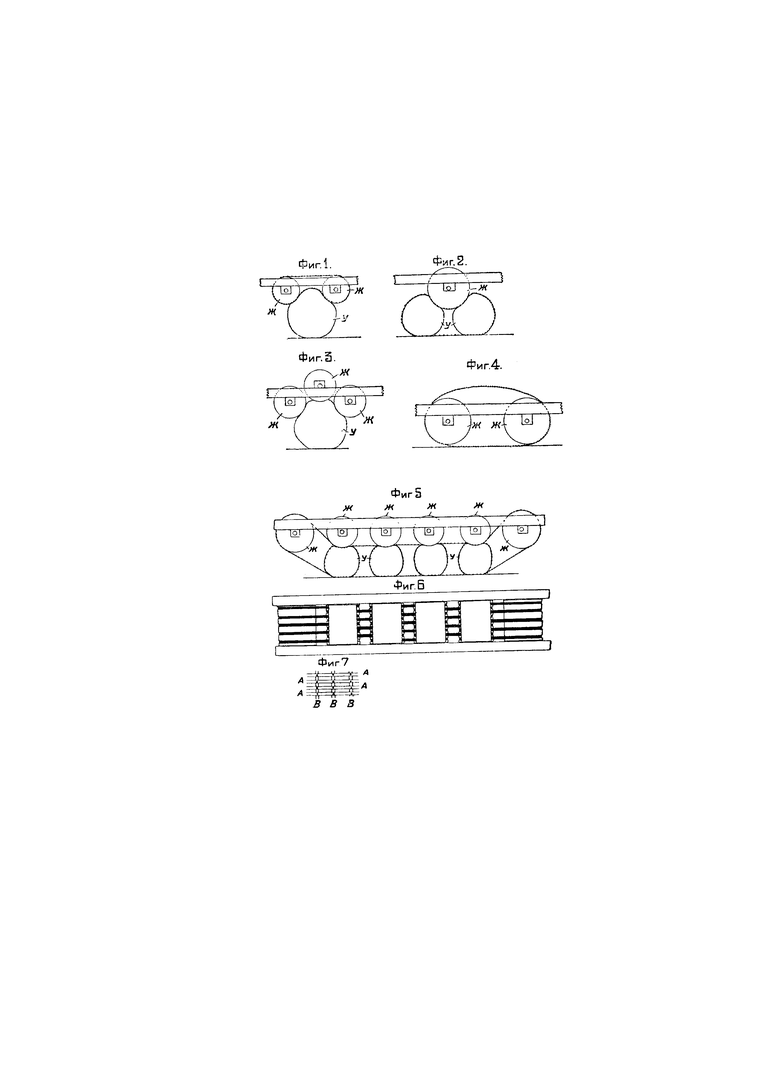
Самодвижущаяся повозка с применением цилиндрических упругих катков, характеризующаяся тем, что упругие катки у, у получают нагрузку и приводятся во вращение жесткими катками ж, ж непосредственно или же при помощи гибкой ленты, охватывающей жесткие или упругие катки (фиг. 1-6).
