(54). ИНДУКЦИОННЫЙ ДАТЧИК СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ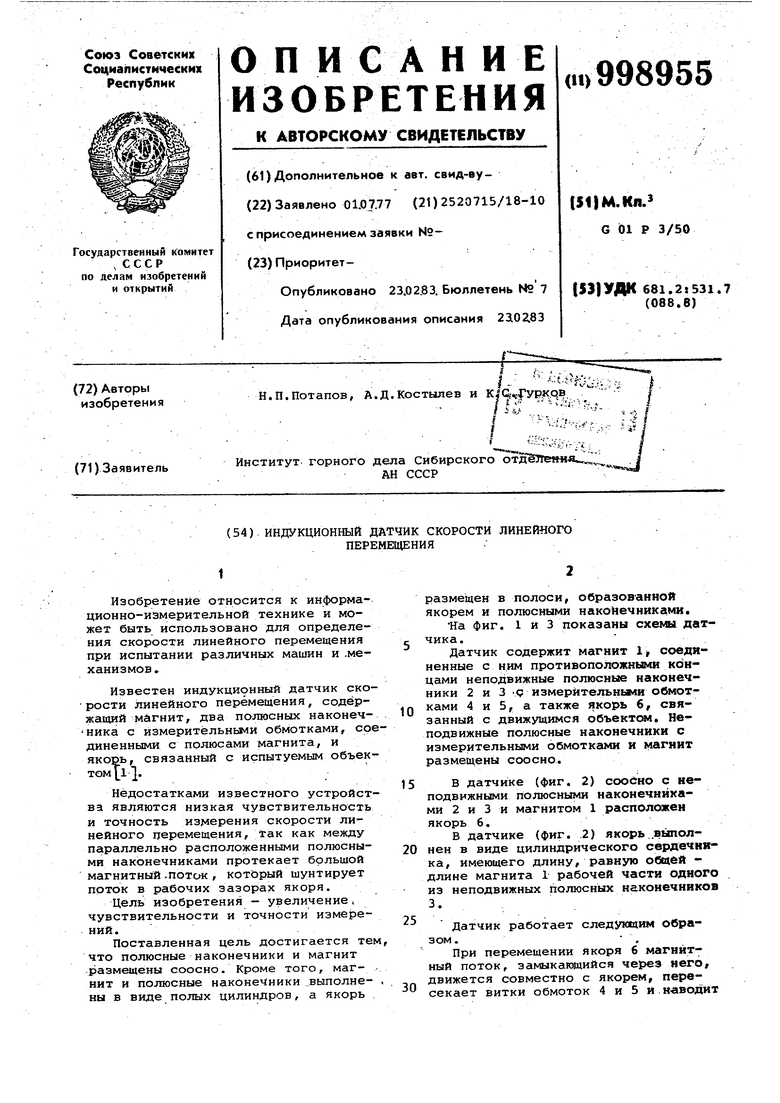
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик ударной скорости машин | 1977 |
|
SU622009A1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |
| Индукционный датчик скорости линейного перемещения | 1975 |
|
SU903775A1 |
| Датчик линейной скорости | 1985 |
|
SU1626155A1 |
| Магнитоэлектрический датчик момента | 1978 |
|
SU892592A1 |
| Трансформаторный датчик угловых перемещений | 1981 |
|
SU974110A1 |
| Датчик угловых перемещений | 1989 |
|
SU1634992A1 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| Датчик контроля разделения объектов | 1988 |
|
SU1610517A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УДАРНОЙ СКОРОСТИ МАШИН | 1996 |
|
RU2110072C1 |
Изобретение относится к информационно-измерительной технике и может быть использовано для определения скорости линейного перемещения при испытании различных машин и .механизмов.
Известен индукци9нный датчик скорости линейного перемещения, содержащий магнит , два полюсных наконечника с измерительными обмотками, соединенньлми с полюсами магнита, и якорь, связанный с испытуемым объектом 1 }.
Недостатками известного устройства являются низкая чувствительность и точность измерения скорости линейного перемещения, так как между параллельно расположенными полюсными наконечниками протекает большой магнитный.поток, который шунтирует поток в рабочих зазорах якоря.
Цель изобретения - увеличение. чувствительности и точности измерений.
Поставленная цель достигается тем, что полюсные наконечники и магнит размещены соосно. Кроме того, магнит и полюсные наконечники выполне- . ны в виде полых цилиндров, а якорь
размещен в полоси, образованной якорем и полюсными наконечниками.
фиг. 1 и 3 показаны схемы датчика.
Датчик содержит магнит 1 соединенные с ним противоположными кбнцами неподвижные полюсные наконечники 2 и 3 -д измерительными обмотками 4 и 5, а также якорь б, свя10занный с движущимся объектет. Неподвижные полюсные наконечники с измерительными обмоткги ш и магнит размещены соосно.
В датчике (фиг. 2) соосно с не15подвижными полюсными наконечниками 2 и 3 и магнитом 1 расположен якорь 6.
В датчике (фиг. 2) якорь..выполнен в виде цилиндрического сердечни20ка, имеющего длину, равную общей длине магнита I рабочей части одного из неподвижных полюсных наконечников 3.
Датчик работает следующим образом . ,
При перемещении якоря 6 магнитный поток, замыкающийся через него, движется совместно с якорем, пере30секает витки обмоток 4 и 5 и наводит
