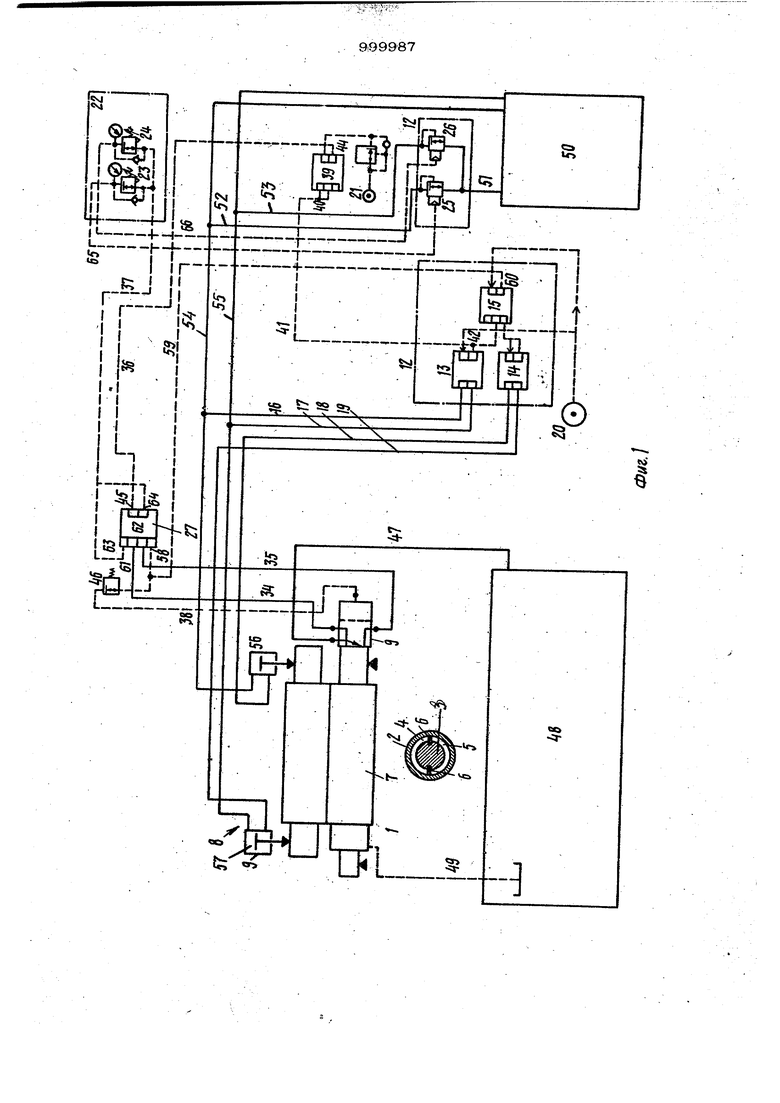
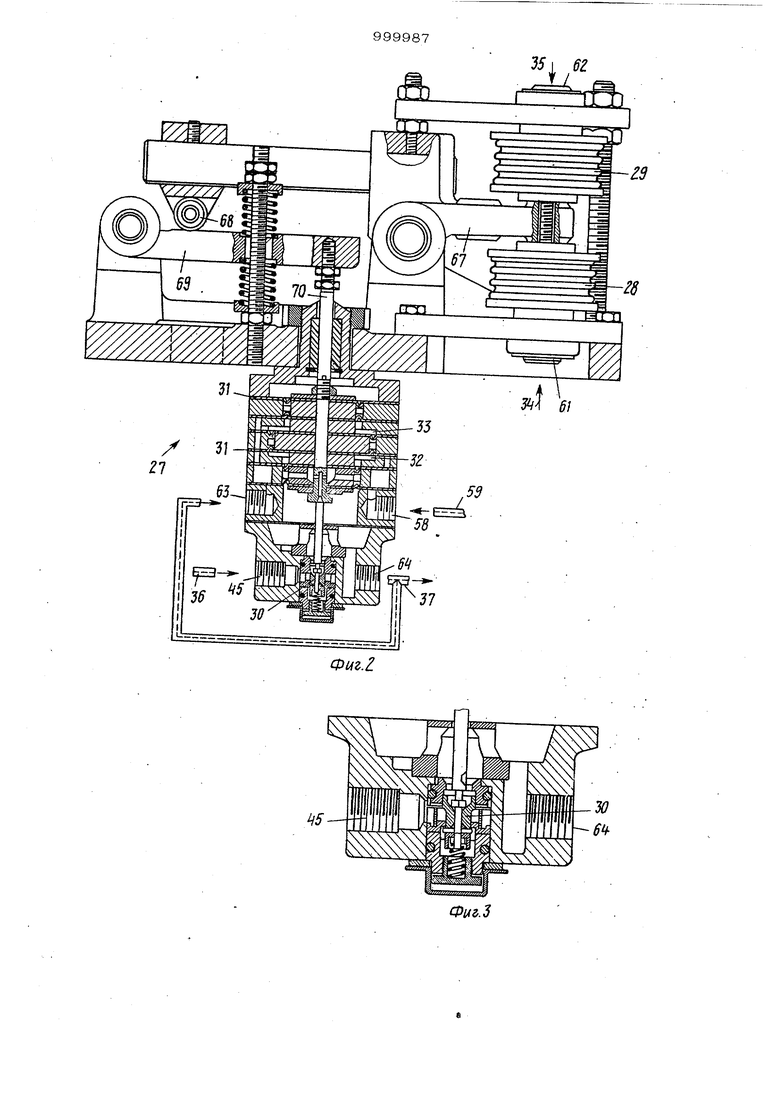
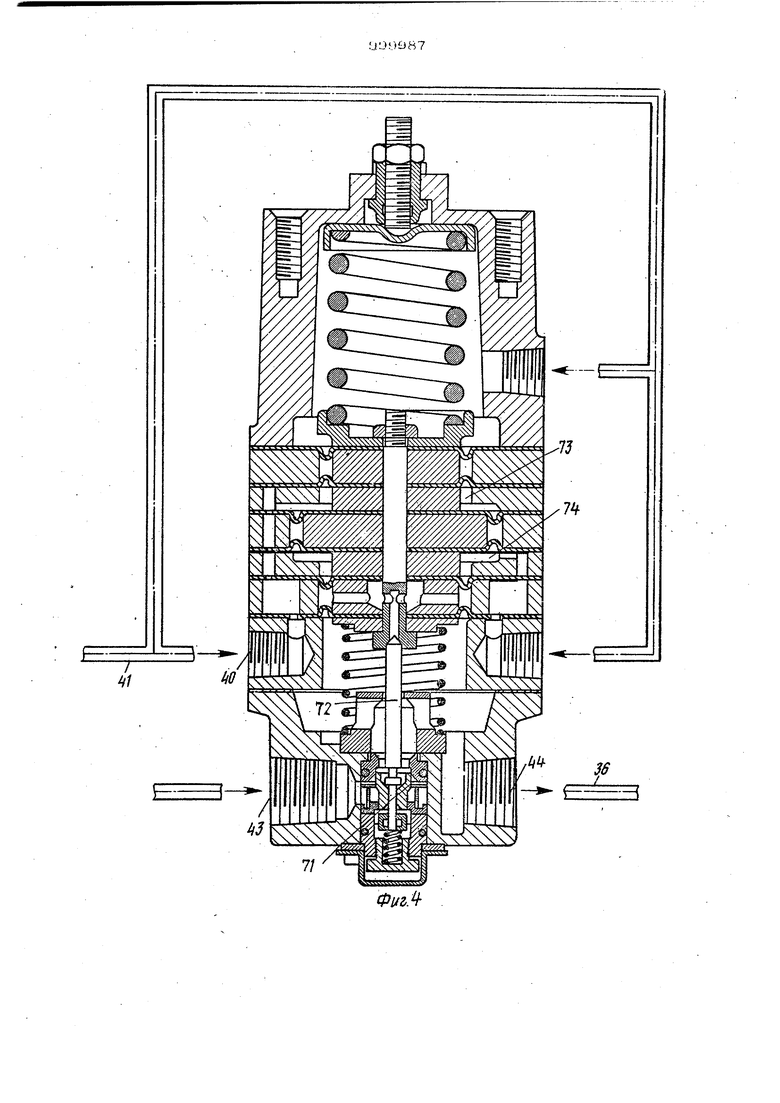
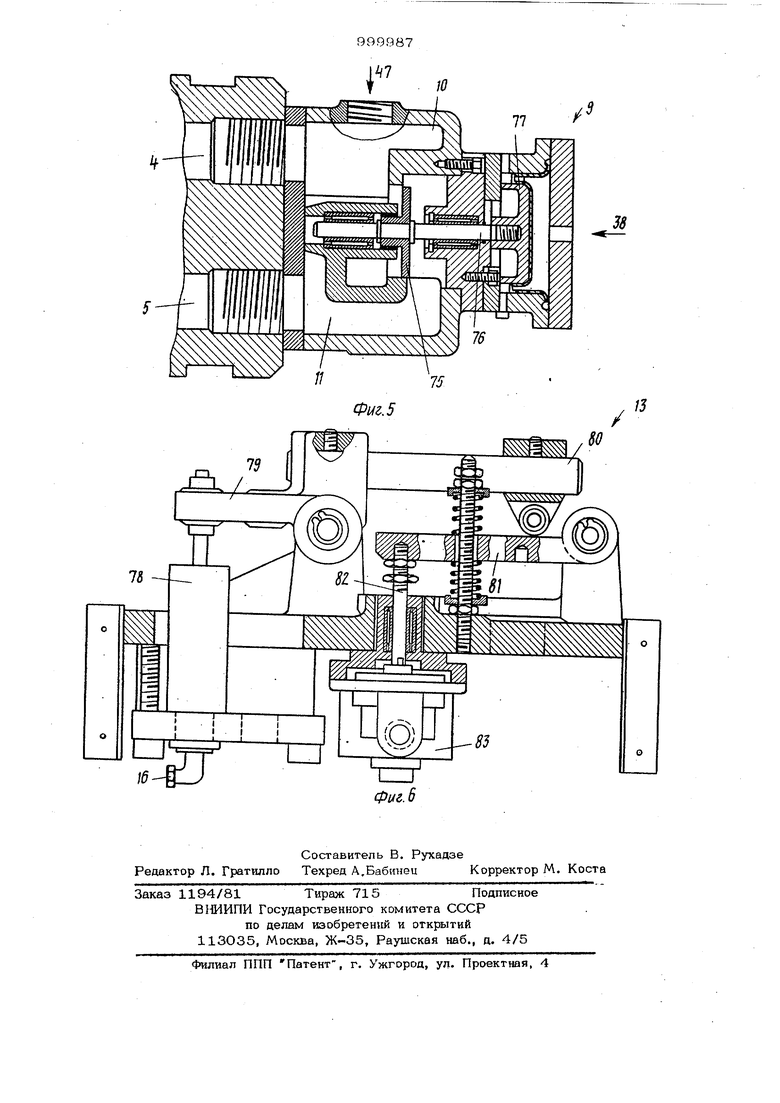
молинпел с выходом преобразователя давления, другой вход - с пневмонасосом, а выход соединен линией управления с одним из входов регулятора давления. Наконец, в линии управления, соединяющей мембранное устройство регулятора давления с дифференциальным регул тором давления, установлен предохранительный клапан. На фиг, 1. показана общая схема системы управления вальцовочным механизмом; на фиг. 2 - регулятор давления; на фиг. 3 - схема конструктивного ис полнения узла регулятора давления, . а именно его дросселирующего клапана; на фиг. 4 - схема конструктивного ис- полнения пневматического элемента управления; на фиг. 5 - схема угла дифференциального регулятора; на фиг. б схема конструктивного нсполчения преобразователя давления. Вальцовочный механизм 1 выполнен в виде полого валка 2, охватывающего сердечкик 3 с образованием вдоль их об щей оси двух продольных замкнутых и изолированных между собой жидкостных камер 4 .и 5. .Эти жидкостные камеры отделены вдоль образующей полого валка 2 и сердечника 3 уплотнениями 6. В вальцовочный механизм 1 входят также нагрузочный валок 7, взаимодействующий с полым валком 2, и нагрузочный механизм 8. В систему управления вальцовочным механизмом входит д 1фференциальный регулятор 9 давления, соединенный гидролиниями 10 и 11 (фиг. 5) с жидкостными камерами 4 и 5 соответственно, а также преобразователь 12 давления, выполненный в виде трех углов 13-15. Преобразователь 12 давления соединен линиями управления 16-19 с нагрузочным механизмом 8, а также с пневмонасосами 20 и 21 и дифференциальным регулятором 9 давления. Пневмонасос 20 соединен с входом каждого из узлов 1315. Система управления имеет также клапанное устройство 22 в виде клахшно 23-26 (фиг. 1). Кроме того, в систему управления входит регулятор 27 давлешет в виде кинематически связанных между собой сильфонов 28 и 29 (фиг. 2 дросселирующего клапана 30, мембранного устройства 31 с рабочими полостями 32 и 33. Каждый из сильфонов 28 и 29 соединен гидролинией 34 и 35 с жидкостной камерой 4 и 5 соответствен Дросселирующий клапан ЗО лиM)874 ниями 36 и 37 управления с клапанами 23 и 24 клапанного устройства 22 ()е- гулирования нагрузки. Мембранное устройство 31 соединено линией 38 управления с дифференциальным регулятором 9 давления. В систему управления входит пневматический элемент 39 управления, вход 40 которого соединен пневмолинией 41 с выходом 42 узла 13 преобразователя 12 давления. Второй вход 43 пневматического элемента 39 управления соединен с пневмонасосом 21, а выход 44 соединен линией 36 управления с входом 45 регулятора 27 давления. В линии 38 управления, соединяющей мембранное устройство 37 регулятора 27 давления с дифференциальным регулятором 9,установлен предохранительный клапан 46. Питание жидкостных камер 4 и 5 осуществляется с помощью гидролинии 47, подключенной с одной стороны к дифференциальному регулятору 9, а с другой к источнику давления с резервуаром 48. Слив жидкости в резервуар 48 осуществляется из жидкостной камеры 5 по магистрали 49, обеспечения работы нагрузочного механизма 8 в системе предусмотрен гидробак 50 с источником давления (не обозначен), который соединен гидролинией 51 с клапанами 25 и 26 клапанного устройства 22 регулирования нагрузки. Каждый из клапанов соединен гидролиниями 52 и 53 с гидролиниями 54 и 55 соответственно. Последние подключены к порщневым полостям 56 и 57 соответственно нагрузочного механизма 8. Другие концы гидролиний 54 -и 55 подключены к источнику давления подачи жидкости из гидробака 50. Регулятор 27 давления имеет несколько входов и выходов: вход 58 соединен пневмолинией 59,с выходом 6О из узла 15 преобразователя 12 давления, вход 61 соединен с гидролинией 34 и далее с жидкостной камерой 4, вход 62 - с гидролинией 35 и далее с жидкостной камерой 5, вход 63 - с линией управления 37 и с выходом 64 того же регулятора 27 давления. Клапаны 23 и 24 соединены линиями управления 65 и 66 с клапанами 25 и 26 соответственно. Регулятор 27 давления (фиг. 2) снабжен рычагом 67, который связан через ролик 68 с рычагом 69. Последний через шток 70 и мембранное устройство 31 кинематически связан с дросселирующим клапаном ЗО. Пневматический элемент 39 управления по конструкции его дросселирующего клапана и мембран1гого устройства подобен регулятору, 27 давления и содержит (фиг, 4) вход 43, соединенный с насосом 21, и выход 44, соединенный с линией 36 управления. Его дросселирующий клапан 71 соединен штоком 72 с мембранным стройством (не обозна но), имеющим рабочие полости 73 и 74 Узел дифференциального регулятора 9 давления (фиг. 5) снабжен клапаном 75 отделяющим гидролинии 10 и 11. Клапан 75 соединен штоком 76 с поршнем 77, который находится под воздействием давления, подводимого по линии 38 управления. Узел 13 преобразователя 1 давления имеет линии 16 и 17 управления (лежат в ьдной плоскости). Эти линии соединены с двумя гидравлическими силовыми элементами (сильфонами) 78, которые кинематически связаны с . чагами 79 и 80. Последний через ролик соединен с рычагом 81. Рычаг 81 связан со штоком 82 и с клапаном 83 для преобразования подводимого давления до опреде)1енной величины. Узел 14 подобе по конструкции узлу 13, а уз.ел 15 подобен по конструкции пневматическому элементу 39 управления. Система управления вальцовочным ме ханизмом работает следующ1Ш образом. Во время работы вальцовочного механизма, устанавливается определенное давление в нагрузочном мехашиме 8, благодаря чему под определенным давлением находится.И нагрузочный валок 7. Для нормальной работы механизма необходимо, чтобы со сторо ш полого валка 2 на валок 7 также действовало определенное давление. Это обеспечивается за счет разности давлений, действующих в жидкост шгх камерах 4 и 5. Для большего прижатия полого валка 2 к нагрузочному валку 7 давление в жидкостной камере 4 должно быть больше давления в жидкостной камере 5. Это достигается за счет того, что давление, подаваемое по гидролинии 47 и далее по гидролини ям 10 и 11 в жидкостные камеры 4 и 5 соответственно, перераспределяется (фиг. 5). Перераспределение давлений осуществляется за счет воздействия давления из ликии 38 управления на пор шень 77 и далее на клапан 75. Смещение клапана 75, например, влево (по чертежу), вызывает уменьшение поступления жидкости в жидкостную камеру 5, КЗ которой жидкость удаляется по магистрали 49 в резервуар 48. Одновремевно больше жидкости поступает в жидкостную камеру 4. Это вызывает смещение полого валка 2 в сторону нагрузочного валка 7. В нагрузочном механизме 8.. давление создается с псмощью гидробака 50 с источником постоянного давления. Далее это давление преобразуется до требуемой величины (с помощью системы управления) на входе в поршневые полости цилиндров (не обозначены) нагрузочного механизма 8. Эти давления подводятся также по линиям 16 и 13 утьравления к узлам 13 и 14 преобразователя 12 давления. К этим же узлам подводится давление по линиям 17 и 19 управления от штоковых полостей цилиндров (не обозначены) того же нагрузочного механизма 8. Рабочее давление, передаваемое нагрузочным валком 7, является разностью давлений между поршневой и штоковой полостями цилиндров нагрузочного механизма 8. Если необходимо ослабить давление нагрузочного валка 7 на полый валок 2, то повышается давление в штоковой полости цилиндров нагрузочного механизма 8. В зав симости от величины давления, развиваемого нагрузочным механизмом 8, .результирующий сигнал от узлов 13 и 14 преобразователя 12 давления поступает в узел 15, откуда в качестве доли от постоянного давления, подаваемого от пневмонасоса 2О, подается на вход 58 регулятора 27 давления по пневмолинии 59 и далее по линии 38 управления к дифференциальному регулятору 9. В последнем происходит такое перемещение поршня 77 (фиг. 5) и клапана 75, которое вызывает требуемое перераспределение давлений между жидкостными камерами 4 и 5 полого валка 2. Давление в нагрузочном механизме 8 должно регулироваться независимо. Это производится с помощью Пневмонасоса 21, обеспечивающего подачу постоянного давления, которое от пневмонасоса 21 через пневматический элемент управления 31, линий 36 и 37 управления подается к клапанному устройству 22 с клапанами 23 и 24. От последних регулируемая величина давления подается по линиям 65 и 66 управления к клапанам 25 и 26. В последних по сигналу регулирования производится преобразование давления, подаваемого из гидробака 5О с источником давления. Требуемая величина гидра лического давления по гидролиниям 52 и 53 поступает в гидролинии 54 и 55 и далее - в порщнеш 1е полости цилиндров нагрузочного механизма 8, Давление в последнем уже описанным образом определяет давление в линии 38 управления и, следовательно, определяет распределение давления в жидкостных камерах 4 и 5. Если в случае неисправности, например, уплотнения 6 (фиг. 1) в жидкостно камере 4 не достигается требуемое давление и происходит чрезмерная утечка жидкости по магистрали. 49, то в нагрузочном механизме 8 возникает избыточное давление, которое приведет к нежелательной нагрузке на подшипники вальцовочного механизма 1. Для исключения этого явления используется регулятор 27 давления. Давление управления, подаваемое по пневмолинии 59, поддержив ется у входа 58, а давления в гидролиниях 34 и 35 у входов 61 и 62 соответстренно (фиг. 2). Давленир управлени по линии 36 управления, будучи подведенным к входу 45, дросселируется в дросселирующем клапане ЗО и оказывает воздействие на клапаны 23 и 24. П1 следние передают полученный сигнал на клапаны 25 и 26, а те в свою очередь изменяют величину давления, подаваемог на нагрузочный механизм 8. Дросселирующий клапан 30 не изменяет проходкого сечения клапана, когда сильфоны 2 и 29 находятся в равновесиии, следовательно, находится в равновесии мембранное устройство 31, в рабочие полоо ти 32 и 33 которого давление подводит ся со стороны входов 58 и 63 соответственно. Если выходит из строя какой-либо элемент системы, искажающий сигнал управления, подаваемый по пневмолинии 59, то в этом случае для обеспечения нормального управления .используется пневматический элемент 39 управления (фиг. 4)j соединенный пневмолинией 41 с узлом 13 в месте, гдефиксируется давление в поршневых полостях цилиндров нагрузочного механизма 8. Если это давление оказывается чрезмерно высоким, го нарушается равновесие в положении штока 72, происходит его смещение под действием пружины (не обозначена) и давления в полости с пружино в сторону закрытия дросселирующего кла пана 71. Благодаря этому уменьшается давление, подаваемое от пневмонасоса 21 в линию 36 управления. Вслед за уменьшением давления в линии 36 управ ления уменьшается давление управления в лшшн 37 управления. Это уменьшенно давление вызывает соответствующее кзмвнение давлений в гидролиниях 52 и 53 и в нагрузочнсм механизме 8 таким образом, что давление, развиваемое им, уменьшается. Предохранительный клатшн 46 необходим для исключения чрезмерного повышения давления в линии 38 управления. Прулленение предлагаемой системы у№равления вальцовочным механизмом повышает долговечность механизма. Формула изобретения 1.Система управления вальцовочным механизмом в виде полого валка, охватывающего сердечник с образованием вдоль их общей оси двух продольных замкнутых и изолированных между собой жидкостных камер, и нагрузочного Bajv:Еса, соединенного с нагрузочным механизмом и взаимодействующего, с полым валком, содержащая дифференциальный регу- ;питор давления, соединенный гидролиниями с жидкостными камерами полого валка, :дэеобразователь давления, соединенщ 1й линиями управления с нагрузочным меха-низмом, пневмонасосами и дифференциальным регулятором давления, и клапанное устройство регулирования нагрузки, отличающаяся тем, что, с целью повышения долговечности вальцовочного механизма, она снабжена регулятором давления в виде кинематически связанных между собой сильфонов, дросселирующего клапана и мембранного устройства с рабочими полостями, при этом каждый сильфон соединен гицролинией с одной из жидкостных камер, дросселирующий клапан линиями управления - с клапанным устройством регулирования нагрузки, а мембранное устройство линией управления с цифференциальным регуляторомдавления. 2.Система по п. 1, отличающая с я тем,что она снабжена пне&матическим элементом управления, один вход которого соединен пневмолиниай с выходом преобразователя давления, другой вход - с пневмонасосом, а выход соединен пнеет олинией с одним из входов регулйтора давления. 3.Система по п. 1, (i т л и ч а ющ а я с 51 тем, что в линии ртравления, соединяющей мембранное устройство регулятора давления с дифференциальным р€ гулятором давления, установлен предохранительный клапан. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1411327, кл. 55е, 1/05, опублик. 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Источник сейсмических сигналов | 1983 |
|
SU1125566A1 |
| НАСОСНЫЙ ГИДРОПРИВОД С ОБЪЕМНЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ | 1998 |
|
RU2153435C2 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Система управления фрикционными муфтами коробки передач и тормозами транспортного средства | 1978 |
|
SU779107A1 |
| Система регулирования газотурбинного двигателя | 1989 |
|
SU1815372A1 |
| ОТСЕЧНОЕ УСТРОЙСТВО | 2005 |
|
RU2292508C2 |
| АКСИАЛЬНО-ПОРШНЕВОЙ САМОВСАСЫВАЮЩИЙ РЕГУЛИРУЕМЫЙ НАСОС | 1997 |
|
RU2135827C1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 1992 |
|
RU2083882C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2184281C2 |
| Пневмонасос | 1990 |
|
SU1765510A1 |