Изобретение относится к машиностроению, в частности к средствам пневмогидроавтоматики, и может быть использовано в робототехнике, автоматических линиях и других объектах.
Целью изобретения является упрощение конструкции и уменьшение габаритов.
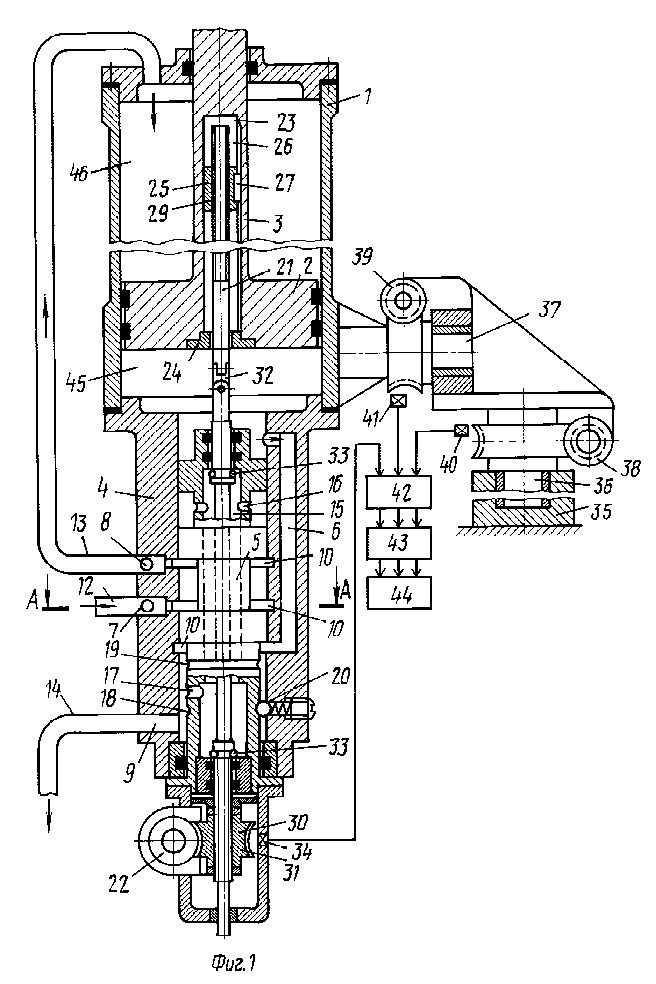
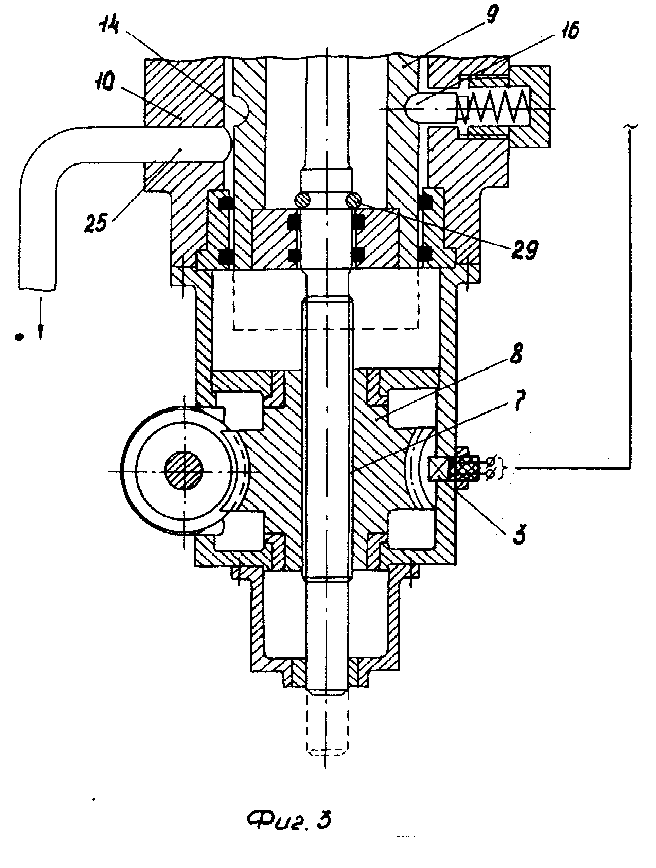
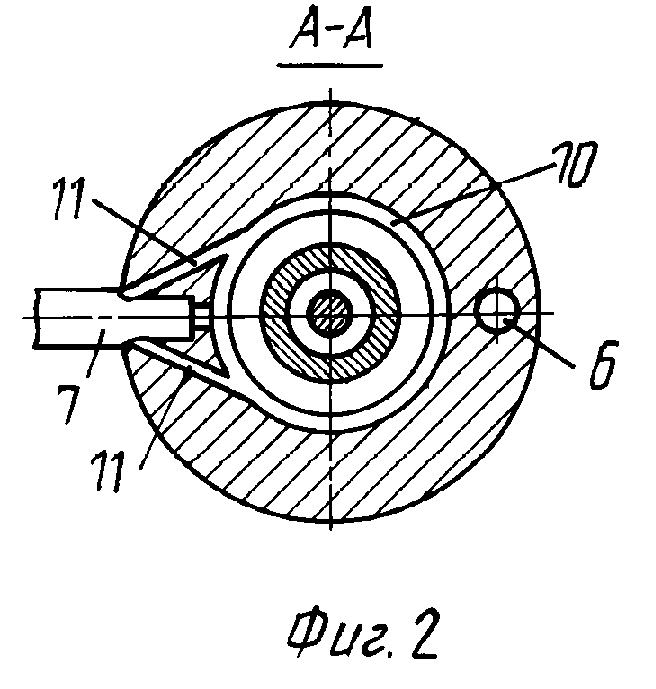
На фиг. 1 представлена принципиальная схема привода; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - механизм переключения с червячной передачей.
Многопозиционный силовой привод содержит цилиндр 1 с поршнем 2 и полым штоком 3, распределительное устройство, включающее гильзу 4 с установленным в ней золотником 5. В гильзе 4 выполнены осевой 6 и радиальные 7-9 каналы, кольцевые проточки 10, при этом радиальные каналы 7-9 могут быть выполнены в виде ряда отверстий 11 с суммарной площадью проходного сечения, соизмеримой с площадью проходного сечения подводящих и отводящих трубопроводов 12-14, а в золотнике 5 - осевой 15 и радиальные 16 и 17 каналы и кольцевые проточки 18 и 19, при этом последние выполнены с шариковым фиксатором 20. Золотник 5 кинематически связан посредством центральной тяги 21 с механизмом 22 переключения и штоком 3, при этом тяга 21 выполнена с возможностью взаимодействия с внутренним торцом 23 штока 3, а поршень 2 снабжен кольцевой шайбой 24, взаимодействующей с упором 25, расположенным между внутренней поверхностью 26 штока 3 и тягой 21. Упор 25 снабжен шпонкой 27, установленной в продольном пазу 28, выполненном на внутренней поверхности 26, и посредством резьбы 29 сочленен с тягой 21. Кроме того, тяга 21 посредством червячной передачи 30 и шлицевого соединения 31 связана с механизмом 22 переключения. Тяга 21 снабжена шарниром 32 и стопорными кольцами 33.
Измерение величины рабочего хода штока 3 посредством бесконтактного электрического датчика 34 основано на функциональной зависимости оборотов червячной передачи 30 и шага резьбы 29. Силовой привод относительно базовой опоры 35 связан шарнирами 36 и 37 и червячными передачами 38 и 39.
Для контроля рабочего положения и положения привода в пространстве предусмотрены бесконтактные электрические датчики 40 и 41, при этом датчики 34, 40, 41 электрически связаны со счетным блоком 42, дешифратором 43 и цифровым измерительным прибором 44. Поршень 2 со штоком 3 установлены в цилиндре 1 с образованием рабочих полостей 45 и 46.
Силовой привод работает следующим образом.
Рабочая среда через канал 7 подается к золотнику 5 и затем по каналу 8 и трубопроводу 13 поступает в полость 46, перемещая поршень 2 вместе со штоком 3 вниз (по чертежу). При этом из полости 45 рабочая среда через каналы 6 и 9 выходит на слив. В процессе перемещения поршня 2 вниз центральная тяга 21 упирается в торец 23 штока 3 и далее совместно с золотником 5 продолжает перемещаться до совмещения проточки с фиксатором 20. После этого рабочая среда из трубопровода 12 по каналам 8 и 6 будет поступать в полость 45 цилиндра 1, обеспечивая перемещение поршня 2 вверх. Одновременно остатки рабочей среды из полости 46 по трубопроводу 13 через каналы 15, 16, 17, 9 и трубопровод 14 подаются на слив. При перемещении поршня 2 вверх центральная тяга 21 остается неподвижной до момента соприкосновения ограничительной шайбы 24 с упором 25. Дальнейшее перемещение устройства приводит к совмещению кольцевой проточки 18 с фиксатором 20, и с этого момента цикл работы привода повторяется.
Для изменения величины рабочего хода поршня 2 необходимо с помощью механизма 22 привести в действие червячную передачу 30, которая посредством шлицевого соединения 31 обеспечивает вращение центральной тяги 21 вокруг своей оси и тем самым изменяется расстояние между шайбой 24 и упором 25. В процессе перемещения рабочего штока 3 вверх или вниз без центральной тяги 21 золотник 5 удерживается в необходимых положениях шариковым фиксатором 20. Вращение червячной передачи 30 регистрируется датчиком 34, а колес червячных передач 38, 39 - датчиками 40, 41, информация от которых поступает в счетный блок 42, дешифратор 43 и цифровой измерительный прибор 44.
Технико-экономическая эффективность от использования предложенного привода заключается в упрощении конструкции, снижении диаметральных габаритов штока, исключении сбоев рабочих ходов, а также в возможности дистанционного контроля и управления за состоянием привода. (56) Авторское свидетельство СССР N 593007, кл. F 15 B 15/24, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Пневматический гаечный ключ | 1940 |
|
SU59072A1 |
| Электрогидравлическая система управления двухмоторного транспортного средства | 1981 |
|
SU1082663A1 |
| Гидропривод глубинного поршневого насоса | 1976 |
|
SU663884A1 |
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ПРИЗАБОЙНУЮ ЗОНУ СКВАЖИН | 1999 |
|
RU2175719C2 |
| Устройство для ввода рабочего органа в стенку скважины | 1981 |
|
SU991036A1 |
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ БЛИНОВА А.В. | 2005 |
|
RU2286263C1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Распределительное устройство | 1974 |
|
SU569760A1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ВЫСОКОНАПОРНЫХ СТРУЙ | 1992 |
|
RU2081290C1 |
Изобретение может быть использовано в робототехнике и автоматических линиях. Цель изобретения - упрощение конструкции и уменьшение габаритов. Для изменения величины рабочего хода штока необходимо механизмом переключения привести в действие червячную передачу, которая посредством шлицевого соединения 3 обеспечивает вращение центральной тяги вокруг своей оси и тем самым перемещение подвижного упора вдоль оси перемещения поршня. За счет перемещения упора меняется расстояние между ним и шайбой, что приводит к более раннему или позднему моменту переключения золотника и, следовательно, к изменению величины хода штока. 4 з. п. ф-лы, 3 ил.
