Изобретение относится к моделированию механических колебаний конструкций с распределенными параметрами, например балок либо пластин, вблизи частоты собственных колебаний механической системы.
Известен способ приведения распределенной жесткости стержня к сосредоточенной, заключающийся в том, что измеряют длину стержня 1, площадь его поперечного сечения F, модуль упругости первого рода Е материала, из которого изготовлен стержень, и рассчитывают приведенную жесткость по формуле
К = Е. F/1.
Недостатком способа является невозможность определения приведенной жесткости при динамических деформациях.
Известен также способ определения приведенной жесткости механической системы, заключающийся в нагружении механической системы сосредоточенной силой N в точке приведения [1] , измерении перемещения Δ этой точки под действием силы и расчете приведенной жесткости К механической системы по формуле К = N/ Δ . Приведенную массу рассчитывают по формуле [2] = (S∫∫m(x, y)·z
= (S∫∫m(x, y)·z (x, y)·dS+Σm
(x, y)·dS+Σm z
z )/z
)/z , где mi - масса сосредоточенного элемента, установленного на основании механической системы в i-й точке; z1 - перемещение i-й точки основания механической системы; z(x, y) - перемещение точки основания механической системы с координатами (x, y); z0 - перемещение точки приведения механической системы; m(x, y) - масса единицы площади основания механической системы в точке с координатами (x, y); s - площадь механической системы; n - количество сосредоточенных элементов, установленных на основании механической системы, предварительно определив массы и перемещения.
, где mi - масса сосредоточенного элемента, установленного на основании механической системы в i-й точке; z1 - перемещение i-й точки основания механической системы; z(x, y) - перемещение точки основания механической системы с координатами (x, y); z0 - перемещение точки приведения механической системы; m(x, y) - масса единицы площади основания механической системы в точке с координатами (x, y); s - площадь механической системы; n - количество сосредоточенных элементов, установленных на основании механической системы, предварительно определив массы и перемещения.
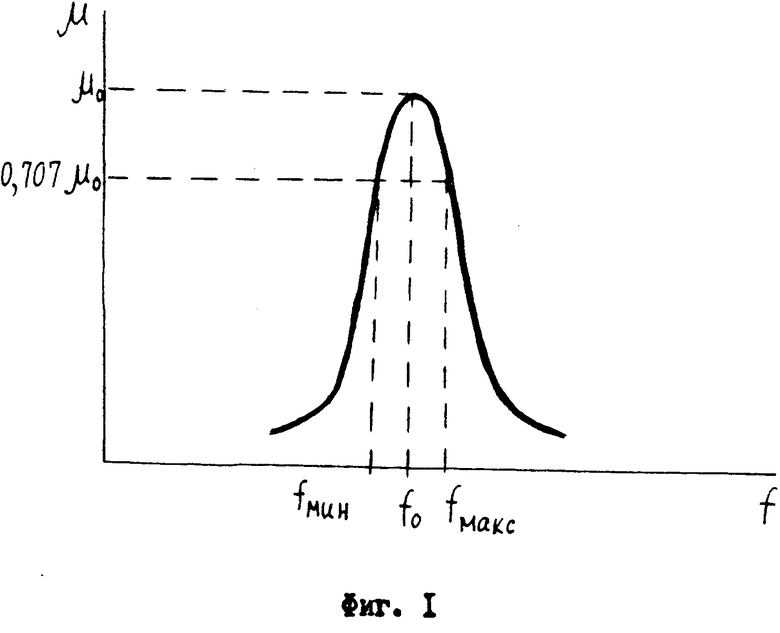
Наиболее близким по технической сущности к изобретению является способ определения приведенных параметров механической системы в динамическом режиме, заключающийся в том, что возбуждают колебания механической системы гармонической силой, приложенной в точках крепления, изменяя частоту возбуждения, измеряют частоту резонансных колебаний механической системы, определяют ширину резонансной кривой на уровне 0,707 от максимального значения. На резонансной частоте определяют форму колебаний механической системы. Бесконечно большое количество точек с амплитудами колебаний дают форму колебаний механической системы. Коэффициент механических потерь рассчитывают по формуле η = = Δ f/f0, где Δ f - ширина резонансной кривой на уровне 0,707 от максимального значения; f0 - резонансная частота.
Приведенную массу вычисляют по формуле (1), в которую, в качестве параметров z(x, y), zi и z0, подставляют либо амплитуды колебаний точек механической системы Z(x, y), Zi, Z0 либо используют отношение амплитуд колебаний точек механической системы к амплитуде колебаний точек крепления ZA, которое получило название коэффициента передачи колебаний ( μ). В последнем случае формула для расчета приведенной массы будет выглядеть = S∫∫m(x, y)·μ2(x, y)·dS+Σmi·μ
= S∫∫m(x, y)·μ2(x, y)·dS+Σmi·μ
Недостаток способа заключается в сложности определения приведенных параметров механической системы из-за сложности определения интеграла по площади механической системы.
Целью изобретения является упрощение процесса определения приведенных параметров.
Это достигается тем, что в способе определения приведенных параметров механической системы, заключающемся в том, что возбуждают колебания механической системы гармонической силой, приложенной в точках крепления, изменяя частоту возбуждения, измеряют частоту резонансных колебаний механической системы, определяют ширину резонансной кривой на уровне 0,707 от максимального значения и коэффициент передачи колебаний в точке приведения при резонансе и по этим параметрам определяют коэффициент механических потерь механической системы при резонансе, массу и жесткость механической системы, сосредоточенные в точке приведения, дополнительно нагружают механическую систему инерционным элементом, который устанавливают в точке приведения, определяют частоту резонансных колебаний механической системы с инерционным элементом, а массу и жесткость механической системы определяют по формулам: =
=  ,
, =
=  , где m - масса механической системы;
, где m - масса механической системы;
К - жесткость механической системы;
Δf - ширина резонансной кривой на уровне 0,707 от максимального значения;
f0, fог - частоты резонансных колебаний механической системы без инерционного элемента и с установленным инерционным элементом, соответственно;
mг - масса инерционного элемента;
μo - коэффициент передачи колебаний механической системы в точке приведения при резонансе.
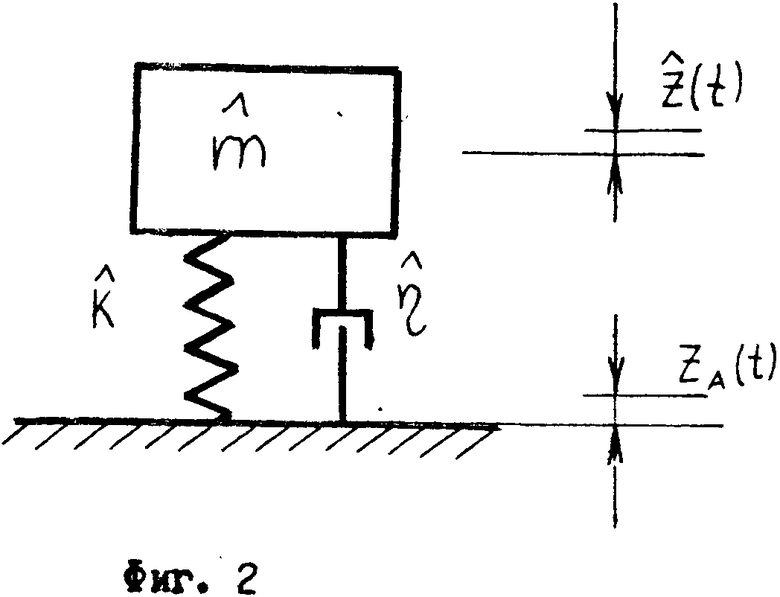
Способ поясняется на фиг. 1 и 2.
Нагрузка механической системы дополнительным инерционным элементом, который устанавливают в точке приведения, и определение частоты резонансных колебаний механической системы с инерционным элементом позволяет упростить процесс приведения распределенных параметров к сосредоточенным в условиях динамического возбуждения. Упрощение процесса приведения происходит за счет того, что вместо М xN, где М и N - количество шагов координатной сетки по осям Х и Y, которая условно разбивает механическую систему на элементы, измерений массы условных элементов и их коэффициентов передачи колебаний, измеряют один раз массу инерционного элемента и собственную частоту колебаний механической системы с инерционным элементом, что по затратам эквивалентно 1-2 ранее указанным измерениям.
Учитывая, что для достижения приемлемой точности приведения для N и М задают значения не менее 10, то с использованием предлагаемого способа затраты снижаются в десятки раз.
Для примера рассмотрим процесс приведения распределенных параметров прямоугольной пластины с размерами сторон 120х80 мм2 и толщиной 2 мм, изготовленной из стеклотекстолита и закрепленной в четырех точках по углам, к параметрам, сосредоточенным в центре пластины. В начале указанная пластина закрепляется на вибростоле электродинамического стенда ВЭДС-200 с помощью элементов крепления, предусмотренных для этой пластины в реальных изделиях (винтовые, болтовые, шпоночные и т. п. ), Устанавливается на вибростенде требуемая амплитуда колебаний вибростола и включается такой режим работы стенда, при котором изменяется частота колебаний при неизменной амплитуде колебаний вибростола. В процессе изменения частоты измеряется коэффициент передачи колебаний механической системы в точке приведения бесконтактным измерителем вибрации и при максимальном значении коэффициента передачи колебаний в точке приведения измеряется частота резонансных колебаний механической системы, которая для рассматриваемой пластины составляет 607 Гц, и значение коэффициента передачи при резонансе, которое для рассматриваемой пластины равно 80. Уменьшая и увеличивая частоту возмущающих колебаний от резонансной частоты добиваются, чтобы коэффициент передачи колебаний равнялся 0,707d˙ 80 = 56,6. Такое значение коэффициент передачи колебаний принимает при частотах возмущающих колебаний fмин = 601 Гц и fмакс = 613 Гц. Ширина резонансной кривой на уровне 0,707 от максимального значения коэффициента передачи колебаний вычисляется по формуле
Δ f = fмакс - fмин = 613 - 601 = 12 Гц.
В точке приведения жестко закрепляется, например с помощью клея либо специальных мастик, используемых для крепления контактных вибропреобразователей к исследуемому изделию, инерционный элемент массой 5 г (масса пластины 50 г), выполненный из материала с высокой плотностью, например из стали. Инерционный элемент можно закреплять на пластине не снимая ее с вибростола.
После закрепления инерционного элемента на вибростенде устанавливается требуемая амплитуда колебаний вибростола и используется такой режим работы стенда, при котором изменяется частота колебаний при неизменной амплитуде колебаний вибростола. В процессе изменения частоты измеряется коэффициент передачи колебаний механической системы в точке приведения бесконтактным измерителем вибрации и при максимальном значении коэффициента передачи колебаний в точке приведения измеряется частота резонансных колебаний механической системы, которая для рассматриваемой пластины с инерционным элементом массой mг = 5 г составляет fог = = 526 Гц. По формулам (2) и (3) рассчитываются сосредоточенные в точке приведения пластины масса m и К жесткость:
 ,
,  к
к (56) Каменкович Н. И. , Фастович Е. П. , Шамгин Ю. В. Механические воздействия и защита редкоэлектронных средств. Минск. : Высшая школа, 1989, с. 46.
(56) Каменкович Н. И. , Фастович Е. П. , Шамгин Ю. В. Механические воздействия и защита редкоэлектронных средств. Минск. : Высшая школа, 1989, с. 46.
Пановко Я. Г. Основы прикладной теории колебаний и удара. Л. : Машиностроение, 1976, с. 33-36.
Сопротивление материалов. Под ред. Писаренко Г. С. Киев: Выща школа, 1986, с. 97.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резонансный способ измерения динамических механических параметров низкомодульных вибропоглощающих материалов | 2019 |
|
RU2722337C1 |
| Резонансный способ определения динамических характеристик низкомодульных материалов | 1987 |
|
SU1539578A1 |
| Радиоэлектронный блок | 1988 |
|
SU1594714A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ГИСТЕРЕЗИСНОГО И ЛИНЕЙНО-ВЯЗКОГО ВНУТРЕННЕГО ТРЕНИЯ В ВЯЗКОУПРУГОМ МАТЕРИАЛЕ | 2000 |
|
RU2183320C2 |
| Способ определения обобщенных параметров колебаний конструкций по частотным характеристикам | 2020 |
|
RU2758152C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486017C1 |
| РЕЗОНАТОР ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 2006 |
|
RU2302007C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2410167C1 |
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
| СПОСОБ ПОЛУЧЕНИЯ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2335352C2 |
Использование: для моделирования механических колебаний конструкций с распределенными параметрами. Сущность: возбуждают колебания механической системы гармонической силой, приложенной в точках крепления. Измеряют частоту резонансных колебаний механической системы, изменяя частоту возбуждения. Дополнительно нагружают механическую систему инерционным элементом, который устанавливают в точке приведения, определяют частоту резонансных колебаний с инерционным элементом, ширину резонансной кривой на уровне 0,707 от максимального значения и коэффициент передачи колебаний в точке приведения при резонансе. По измеренным величинам определяют параметры механической системы: массу, жесткость и коэффициент механических потерь. 2 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ПРИВЕДЕННЫХ ПАРАМЕТРОВ МЕХАНИЧЕСКОЙ СИСТЕМЫ, заключающийся в том, что возбуждают колебания механической системы гармонической силой, приложенной в точках крепления, изменяя частоту возбуждения, измеряют частоту резонансных колебаний механической системы, определяют ширину резонансной кривой на уровне 0,707 от максимального значения и коэффициент передачи колебаний в точке приведения при резонансе и по этим параметрам определяют коэффициент механических потерь механической системы при резонансе, массу и жесткость механической системы, сосредоточенные в точке приведения, отличающийся тем, что, с целью упрощения, дополнительно нагружают механическую систему инерционным элементом, который устанавливают в точке приведения, определяют частоту резонансных колебаний механической системы с инерционным элементом, а массу  и жесткость
и жесткость  механической системы определяют по формулам
механической системы определяют по формулам =
= 
22:  =
= 
где Δf - ширина резонансной кривой на уровне 0,707 от максимального значения;
f0, f02 - частоты резонансных колебаний механической системы без инерционного элемента и с установленным инерционным элементом соответственно;
m2 - масса инерционного элемента;
μ0 - коэффициент передачи колебаний механической системы при резонансе.
