Изобретение относится к вибрационной технике и может быть использовано во всех отраслях промышленности для возбуждения из состояния покоя резонансных механических колебаний при высокоэнергетическом размоле порошка в вибрационных мельницах планетарного типа.
В машинах типа виброизмельчителей, вибрационных распределительных и питающих устройствах рабочие органы представляют собой тела вращения (цилиндры, шары, конусы), которые под действием вибрации обкатываются по цилиндрическим или конусообразным полостям большего размера другого тела (корпуса машины) [Блехман И.И. Синхронизация динамических систем. М.: Наука, 1971, с.676-683].
Существующие в настоящее время машины указанного типа работают в далеко зарезонансном режиме колебаний [Гончаревич И.Ф. Вибрация - нестандартный путь. М.: Наука, 1986, с.7-8; Вибрации в технике: Справочник в 6 томах. Т.4. Вибрационные процессы. М.: Машиностроение, 1981, с.139-141, с.351].
Максимальная производительность и энергоэффективность вибрационных машин может быть достигнута путем создания резонансных колебательных систем, обладающих техническим интеллектом, то есть способностью автоматической адаптации машины к постоянно действующим возмущениям при протекании технологического процесса без вмешательства извне. Изобретение решает задачу возбуждения стабильных резонансных колебаний с обкаткой тел вращения на основе использования процессов самоорганизации, происходящих в сложных системах вдали от равновесия [Антипов В.И. Использование комбинационного параметрического резонанса для усовершенствования вибрационных машин // Проблемы машиностроения и надежности машин. 1998. №4, с.16-21].
Известен способ возбуждения механических колебаний и вращательных движений системы твердых тел, схема которой приведена в книге [Блехман И.И. Что может вибрация? О «Вибрационной механике» и вибрационной технике. М.: Наука, 1988, с.134, рис.12.2, в].
Система состоит из одного инерционного дебалансного вибровозбудителя, закрепленного на мягко виброизолированном твердом теле (несущем теле), в котором размещены два тела вращения (ролик и кольцо). Под действием вибрации ролик обкатывается по внутренней поверхности цилиндрической полости, а кольцо своей внутренней поверхностью обкатывается по внешней поверхности оси, закрепленной на несущем теле. При этом система функционирует в далеко зарезонансном режиме колебаний. Здесь реализуется эффект вибрационного поддержания вращения.
Тела вращения (ролик, кольцо) совершают сложные движения: вращение вокруг собственной оси и планетарное движение вокруг центра цилиндрической полости или оси. Передаточное отношение угловой скорости обкатки к угловой скорости собственного вращения определяется выражением i=r/(r-R), где R - радиус беговой дорожки, r - радиус тела вращения. Оно отрицательно при наружной обкатке.
При обкатке тела вращения оказывают на несущее тело действие, подобное действию инерционного дебалансного вибровозбудителя. В вибротехнике тела вращения используются не как возбудители колебаний, а в качестве рабочих органов машины. Например, в конусных дробилках «Механобр-Техника» рабочий орган представляет собой конусообразное тело, которое под действием вибраций обкатывается по конусообразной полости в корпусе машины [Блехман И.И. Что может вибрация? О «Вибрационной механике» и вибрационной технике. М.: Наука, 1988, с.128-129, рис.11.3, а].
Эти решения имеют следующие недостатки.
- Для самовозбуждения обкатки тел вращения требуется сообщить несущему телу круговые колебания достаточно большой амплитуды и высокой частоты, что связано с увеличением дебалансных масс вибровозбудителя. Создаваемые при вращении дебалансов большие центробежные силы нагружают подшипники. Это снижает их ресурс и влечет большой непроизводительный расход энергии на преодоление сопротивлений вращения вала.
- При зарезонансной настройке для преодоления области интенсивных резонансных колебаний нужно иметь двигатель, мощность которого в 5-6 раз первышает мощность, необходимую для работы в зарезонансном режиме.
- В зарезонансном режиме работы машины энергия вибровозбудителя расходуется не только на преодоление сил трения и поддержание обкатки, но и на преодоление сил инерции масс системы, тогда как в резонансном состоянии упругие и энерционные силы взаимно уравновешиваются.
В качестве прототипа принят способ возбуждения резонансных механических колебаний и устройство для его осуществления по патенту РФ №2410167. Опубл.: 27.01.2011.
Способ возбуждения резонансных механических колебаний, заключающийся в том, что резонансные колебания возбуждают за счет периодического принудительного изменения инерционных параметров колебательной системы, образованной рабочим органом на упругой подвеске и параметрическим вибровозбудителем, включающим ротор с беговыми дорожками и телами качения в них, осуществляют упругую подвеску рабочего органа в двух взаимно перпендикулярных направлениях по осям X, Y, производят настройку колебательной системы, задавая жесткость упругой подвески и частоту вращения ротора, определяемую по формуле
ω=λ1+λ2
где λ1 - эффективная частота тела качения во вращающейся системе, λ2 - парциальная собственная частота рабочего органа; для возбуждения круговых колебаний, жесткость упругой подвески выбирают изотропной в плоскости вращения вибровозбудителя с равными коэффициентами жесткости Cx=Cy=C; для возбуждения поступательных колебаний по эллиптическим траекториям коэффициенты жесткости упругой подвески Cx, Cy выбирают различными, но так, чтобы парциальные собственные частоты λ2x, λ2y были близкими и располагались в резонансной зоне, причем частоту λ2 определяют по усредненной жесткости подвески C=(Cx+Cy)/2; устройство для возбуждения резонансных механических колебаний, содержащее колебательную систему в виде соединенного с основанием упругими связями рабочего органа и установленного на нем параметрического вибровозбудителя, в котором на валу электродвигателя закреплен уравновешенный ротор с парой незамкнутых круговых беговых дорожек, расположенных симметрично относительно двух взаимно перпендикулярных его диаметров, их центры смещены от оси вращения ротора на одинаковые расстояния в сторону беговой дорожки, а в беговых дорожках размещены одинаковые уравновешенные тела качения, ротор выполнен из набора одинаковых дисков, в смежных дисках оси обкатки тел качения повернуты вокруг оси вращения ротора на одинаковый угол γ=π/S, где S - число дисков одного ротора, а колебательная система выполнена с возможностью перемещения рабочего органа по осям X и Y.
Это решение имеет следующие недостатки.
Схема прототипа состоит из параметрического вибровозбудителя и рабочего органа, установленного на основании (раме) с помощью упругих связей. Рама жестко соединена с несущими конструкциями. В этих условиях резонансные колебания в полной мере будут передаваться через упругие связи несущим конструкциям. Самовозбуждение обкатки тел вращения тем легче, чем больше амплитуда и частота колебаний. Поэтому для самовозбуждения обкатки нужно иметь жесткие упругие связи, которые обеспечивают резонансный режим колебаний с большой амплитудой и высокой частотой. При этом на несущие конструкции будут передаваться большие усилия и создаваться неблагоприятные условия для обслуживающего персонала. Последний недостаток особенно недопустим для тяжелых высокопроизводительных резонансных машин.
Эти недостатки устраняются следующим решением.
Решается задача по разработке принципиально нового энергосберегающего способа возбуждения резонансных механических колебаний и вращательных движений системы твердых тел на основе принципов самоорганизации, что открывает новые возможности в решении проблемы дробления и измельчения различных материалов путем создания высокопроизводительного помольного оборудования, обладающего техническим интеллектом.
Технический результат - это достижение тонкости субмикронного и наноразмерного диапазонов при высокоэнергетическом размоле различных видов материалов в резонансных вибрационных мельницах планетарного типа с самоорганизацией процесса измельчения и снижение уровня вибрации несущих конструкций.
Этот технический результат достигается тем, что в способе возбуждения резонансных механических колебаний, заключающемся в том, что резонансные колебания возбуждают за счет периодического принудительного изменения инерционных параметров колебательной системы, образованной рабочим органом общей массой M1 на упругой подвеске и параметрическим вибровозбудителем, включающим ротор с беговыми дорожками в нем и телами качения в них, осуществляют упругую подвеску рабочего органа в двух взаимно перпендикулярных направлениях по осям X, Y, производят настройку колебательной системы, задавая жесткость упругой подвески и частоту вращения ротора, вводят реактивную массу М2, соединенную с массой M1 при помощи упругой системы с жесткостями Cx, Cy, и возбуждают поступательные резонансные противофазные колебания масс M1 и M2 с реализацией синергетического эффекта системы в целом, настройку колебательной системы производят, задавая жесткость упругой системы между массами M1 и M2, угловые скорости ротора вибровозбудителя со и обкатки Ω, собственную частоту колебаний тел качения λ1, которые выбирают из соотношений
где C=(Cx+Cy)/2 - усредненная жесткость упругой системы, Mпр=M1M2/(M1+M2) - приведенная масса системы, ν - безразмерный параметр, определяющий собственную частоту тел качения; для возбуждения колебаний по эллиптическим траекториям жесткости Cx, Cy выбирают различными, но так, чтобы собственные частоты 
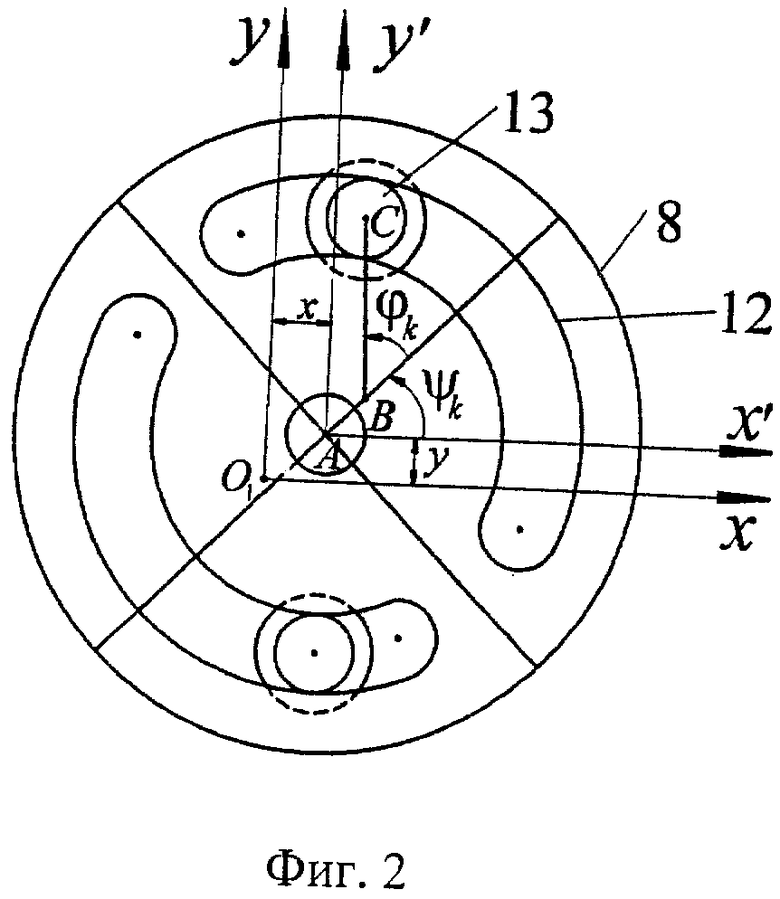
На фиг.1 изображена схема одного из возможных устройств, которое реализует предлагаемый способ, а на фиг.2 - инерционный элемент параметрического вибровозбудителя.
Колебательная система вибрационного устройства состоит из рабочего органа (активной части системы) 1 общей массой M1 и реактивной части 2 массой M2, которые соединены между собой основной (рабочей) упругой системой 3. Масса M2 опирается на основание 4 с помощью мягких амортизаторов 5. Рабочий орган включает два одинаковых полых цилиндра 6, в которые свободно вложены одинаковые цилиндрические ролики 7 с возможностью обкатки полостей цилиндров, и параметрический вибровозбудитель. Ось ротора 8 вибровозбудителя параллельна осям цилиндров 6 и удалена от них на одинаковые расстояния. На активной и реактивной массах закреплены регулировочные грузы 9.
Упругая система выполнена в виде спаренных винтовых пружин. Пружины зажаты между стаканами и гнездами в плитах с помощью шпилек 10 и гаек с контрагайками 11. Эта упругая система с жесткостями Cx, Cy по осям X, Y обладает возможностью регулирования поперечной жесткости сжатых пружин путем изменения их длины. Для двухмассных резонансных систем жесткость амортизаторов принимается равной нулю.
Вибровозбудитель включает, по меньшей мере, один уравновешенный ротор 8 в виде двух одинаковых дисков, в каждом диске образована пара незамкнутых круговых беговых дорожек 12, расположенных симметрично относительно двух взаимно перпендикулярных его диаметров, их центры смещены от оси вращения ротора на одинаковые расстояния в сторону беговой дорожки, а в беговых дорожках размещены одинаковые уравновешенные тела качения 13, в смежных дисках оси обкатки тел качения повернуты вокруг оси вращения ротора на угол γ=π/2.
Колебательная система выполнена с возможностью поступательного перемещения масс M1, М2 по любым направлениям в плоскости oxy, задаваемой неподвижными осями X, Y.
Положение массы M1 определяется координатами X, Y. Положение осей обкатки определяется углами=ψk+ωt+2πk/N, а положение тел качения - углами φk, k=1, 2, …, N (фиг.2), где t - время, N - число тел качения.
При резонансе колебательная система устройства совершает движение, близкое к собственному движению, которое суть свободные колебания. Каждой собственной частоте λ соответствует своя собственная форма колебаний. За рабочие колебания принимаются резонансные колебания, форма которых близка к собственной форме поступательных противофазных свободных колебаний масс M1, M2 с частотой 
Способ осуществляется следующим образом. При равномерном вращении ротора вибровозбудителя с угловой скоростью ω тела качения (бегунки) образуют подсистему маятников (осцилляторов качения) с точками подвеса в центрах кривизны беговых дорожек с собственными частотами λ1=νω во вращающейся системе координат, где 
Производят настройку колебательной системы, задавая жесткости упругой системы Cx, Cy, собственную частоту тел качения λ1, угловую скорость вращения ротора вибровозбудителя ω, угловую скорость обкатки Ω, которые выбирают из соотношений
при  , где ε=σν2Nmρc/(2M1l) - коэффициент, пропорциональный отношению общей массы тел качения к массе M1, ε<<1,
, где ε=σν2Nmρc/(2M1l) - коэффициент, пропорциональный отношению общей массы тел качения к массе M1, ε<<1,  ,
,  - относительные коэффициенты линейного демпфирования осцилляторов качения и масс M1 и М2; n0, n - усредненные коэффициенты затухания в направлении координат φk и x, y, которые определяются экспериментально, σ - число роторов вибровозбудителя.
- относительные коэффициенты линейного демпфирования осцилляторов качения и масс M1 и М2; n0, n - усредненные коэффициенты затухания в направлении координат φk и x, y, которые определяются экспериментально, σ - число роторов вибровозбудителя.
Для возбуждения поступательных резонансных противофазных колебаний масс M1, M2 по эллиптическим траекториям с обкаткой тел вращения внутри полостей и реализацией синергетического эффекта, жесткости Cx, Cy выбирают различными, но так, чтобы собственные частоты 
Для возбуждения поступательных резонансных противофазных колебаний масс M1 и M2 по круговым траекториям с обкаткой тел вращения внутри полостей и реализацией синергетического эффекта жесткость упругой системы выбирают изотропной Cx=Cy=C.
Вибрационное устройство работает следующим образом.
Энергия к колебательной системе вибрационного устройства подводится за счет равномерного вращения ротора 8 вибровозбудителя. Равномерное вращение ротора с угловой скоростью ω порождает принудительное периодическое изменение во времени инерционных параметров (инертных свойств) колебательной системы с периодом 2π/ω, что приводит к самовозбуждению из состояния равновесия резонансных колебаний масс M1, М2 и осцилляторов качения 13 с обкаткой роликов 7 внутри полостей цилиндров 6 с реализацией синергетического эффекта, т.е. взаимного стимулирования колебаний тел системы и обкатки роликов внутри полостей цилиндров.
В этом случае в системе самовозбуждается многократный комбинационный параметрический резонанс на частотах ω1≅λ1=νω и 
В результате колебаний осцилляторов качения 13 с частотой ω1≅νω, их центр масс описывает окружность в системе координат Ax'y', что приводит к автоматическому образованию неуравновешенности ротора 8 и возникновению невидимого дебаланса. Этот дебаланс вращается с угловой скоростью ω2. Поскольку ω2≅λ2, то центробежная сила инерции будет возбуждать резонансные колебания масс M1, M2. Колебания массы M1, в свою очередь, возбуждает обкатку роликов 7 внутри цилиндров 6 с угловой скоростью Ω=ω2. При обкатке роликов в цилиндрах создается дополнительная центробежная сила, которая поддерживает резонансное состояние системы. Таким образом, колебательная система твердых тел самоорганизуется без вмешательства извне с образованием пространственно-временных структур. Временная структура - это периодические колебания тел системы, а пространственные структуры - планетарное движение роликов внутри полостей цилиндров и вращательное движение невидимого дебаланса ротора вибровозбудителя.
Пример осуществления способа.
Для проверки возможности практического осуществления способа и устройства была изготовлена действующая модель согласно фиг.1. В этом устройстве использовался стальной двухдисковый (четырехмаятниковый) ротор, который закреплялся на конце электродвигателя постоянного тока мощностью 77 Вт с регулируемой скоростью вращения (0-314 с-1).
Параметры параметрического вибровозбудителя: ν=0,255, ε=0,008, N=4, σ=1. В полости цилиндров с внутренним диаметром 2R=0,028 м свободно вкладывались цилиндрические ролики 2r=0,02 м. Крышка цилиндра выполнена прозрачной, что позволяло в процессе опытов наблюдать обкатку роликов внутри полостей при стробоскопическом освещении.
Колебательная система модельной установки имела следующие параметры: M1=12,85 кг, М2=18,2 кг, Мпр=7,53 кг, Cx=152124,26 н/м, Cy=151313,52 н/м, C=(Cx+Cy)/2=151718,89 н/м, λ2x=142,14 c-1, λ2y=141,76 c-1, λ2=141,95 с-1, ω=λ2(1-ν)=190,54 с-1.
Отстройка собственных частот λ2x, λ2y противофазных колебаний масс M1, М2 осуществлялась с помощью регулировочных грузов 9 и изменения жесткости спаренных пружин путем их поджатая.
При включении электродвигателя и вхождении системы в режим многократного комбинационного резонанса массы M1, М2 совершали поступательные противофазные колебания по эллиптическим траекториям, что фиксировалось с помощью электронного стробоскопа. При этом большая полуось эллипса ориентирована по оси Y.
При установке достаточно малой амплитуды массы M1 и, следовательно, цилиндров обкатка роликов в полостях не возбуждалась, причем имел место отрыв роликов от полостей цилиндров с последующими соударениями.
При вращении ротора вибровозбудителя с угловой скоростью ω=199,8 с-1 самовозбуждался стабильный стационарный резонансный режим колебаний массы M1 по эллиптическим траекториям с амплитудами A1x=0,0018 м, A1y=0,0025 м с обкаткой роликов в цилиндрах с угловой скоростью Ω=143 с-1. Обкатка роликов наблюдалась при стробоскопическом освещении. При совпадении числа вспышек в минуту с угловой скоростью обкатки в оборотах в минуту ролики казались неподвижными. Амплитуды колебаний измерялись ручным вибрографом ВР-1.
При выравнивании жесткостей Cx→Cy резонансные колебания масс M1, M2 приближаются к круговым.
Опыты показали, что обкатка роликов в цилиндрах повышает стабильность резонансного режима за счет реализации синергетического эффекта.
Предложенный способ возбуждения резонансных колебаний и вращательных движений системы твердых тел обладает важными достоинствами, которые наделяют вибрационное устройство (вибромашину) новыми качествами.
1. Создана энергосберегающая колебательная система твердых тел, предлагаемая настройка которой обеспечивает самоорганизацию резонансных колебаний масс системы (вибромашины) с динамической обкаткой тел вращения внутри цилиндрических или конусообразных полостей корпуса машины и реализацией синергетического эффекта без вмешательства извне, что открывает новые возможности в разработке энергосберегающих вибрационных технологий.
2. Самоуправляемые и самоподдерживаемые стабильные колебания вибромашины достигаются путем вовлечения тел системы в коллективное резонансное взаимодействие за счет потери устойчивости ее положения равновесия и самовозбуждения многократного комбинационного параметрического резонанса с обкаткой тел вращения.
3. Явление самоорганизации резонансных колебаний и вращательных движений системы твердых тел открывает перспективу создания новых повышенной эффективности и производительности вибрационных планетарных мельниц, в которых тела вращения выполняют функции рабочих органов. В таких машинах энергия вибровозбудителя расходуется только на преодоление диссипативных сил и поддержание обкатки рабочих органов, а силы упругости и силы инерции взаимно уравновешиваются. Вместе с тем планетарное движение рабочих органов в процессе их обкатки оказывает резонансное воздействие на колебательную систему машины. Энергия, потребляемая на обкатку, частично трансформируется в колебательную систему за счет обратного резонансного воздействия рабочего органа на колебательную систему машины. Это снижает удельные затраты энергии при микро и нанопомоле.
4. Предлагаемые вибромашины обеспечивают высокую степень виброизоляции, что позволяет реализовать резонансные режимы работы. Реактивная масса может быть использована в качестве второго рабочего органа.
5. Установочная мощность привода снижается более, чем в два раза по сравнению с используемыми в промышленности инерционными (дебалансными) или кинематическими вибровозбудителями. Приводной двигатель в момент запуска преодолевает в основном момент сил трения в подшипниках, разгоняясь практически в режиме холостого хода.
Анализ показывает, что предлагаемое решение соответствует критериям «новизна», «изобретательский уровень» и «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2410167C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
| Способ возбуждения колебаний и устройство для его осуществления | 2015 |
|
RU2669163C2 |
| ВИБРАЦИОННАЯ ИЗМЕЛЬЧИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2604005C1 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| Роторно-маятниковый инерционный элемент | 2021 |
|
RU2790957C1 |
| Способ и устройство оценки технического состояния инженерного сооружения | 2016 |
|
RU2617800C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
Изобретение относится к вибрационной технике, в частности для возбуждения из состояния покоя резонансных механических колебаний, и может быть использовано в вибрационных мельницах. Способ заключается в том, что резонансные колебания возбуждают за счет периодического принудительного изменения инерционных параметров колебательной системы, образованной рабочим органом общей массой на упругой подвеске и параметрическим вибровозбудителем, включающим ротор с беговыми дорожками в нем и телами качения в них, осуществляют упругую подвеску рабочего органа в двух взаимно перпендикулярных направлениях по двум осям и производят настройку колебательной системы, задавая жесткость упругой подвески и частоту вращения ротора. Дополнительно вводят реактивную массу, соединенную с общей массой при помощи упругой системы, и возбуждают поступательные резонансные противофазные колебания обоих масс с реализацией синергетического эффекта системы в целом. Настройку колебательной системы производят, задавая жесткость упругой системы между обеими массами, угловые скорости ротора вибровозбудителя и обкатки, собственную частоту колебаний тел качения. Устройство содержит колебательную систему в виде соединенного с основанием упругими связями рабочего органа общей массой и установленного на нем параметрического вибровозбудителя, в котором на валу электродвигателя закреплен уравновешенный ротор с парой незамкнутых круговых беговых дорожек, расположенных симметрично относительно двух взаимно перпендикулярных его диаметров, их центры смещены от оси вращения ротора на одинаковые расстояния в сторону беговой дорожки, а в беговых дорожках размещены одинаковые уравновешенные тела качения. Ротор выполнен из набора одинаковых дисков, в смежных дисках оси обкатки тел качения повернуты вокруг оси вращения ротора на одинаковый угол, а колебательная система выполнена с возможностью перемещения рабочего органа но двум осям. Дополнительно оно содержит реактивную массу, соединенную с рабочим органом и основанием упругими связями. Рабочий орган снабжен, но меньшей мере, двумя полыми цилиндрами, которые размещены на нем симметрично относительно оси вращения ротора, а в полости цилиндров свободно вложены цилиндрические ролики с возможностью обкатки внутри полостей. Технический результат заключается в достижение тонкости помола субмикронного и наноразмерного диапазонов для различных материалов с самоорганизацией процесса измельчения и снижением уровня вибрации несущих конструкций. 2 н. и 2 з.п. ф-лы, 2 ил.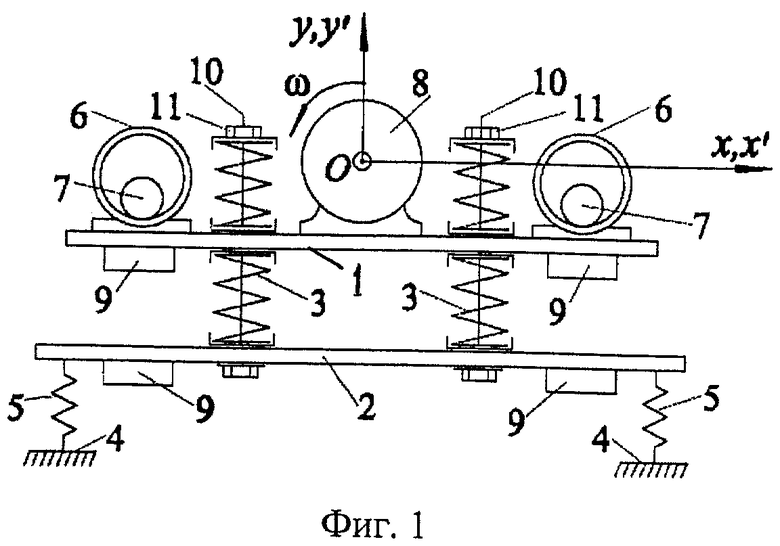
1. Способ возбуждения резонансных механических колебаний, заключающийся в том, что резонансные колебания возбуждают за счет периодического принудительного изменения инерционных параметров колебательной системы, образованной рабочим органом общей массой M1 на упругой подвеске и параметрическим вибровозбудителем, включающим ротор с беговыми дорожками в нем и телами качения в них, осуществляют упругую подвеску рабочего органа в двух взаимно перпендикулярных направлениях по осям X, Y, производят настройку колебательной системы, задавая жесткость упругой подвески и частоту вращения ротора, отличающийся тем, что вводят реактивную массу М2, соединенную с массой M1 при помощи упругой системы с жесткостями Сх, Су, и возбуждают поступательные резонансные противофазные колебания масс M1 и М2 с реализацией синергетического эффекта системы в целом, настройку колебательной системы производят, задавая жесткость упругой системы между массами M1 и М2, угловые скорости ротора вибровозбудителя ω обкатки Ω, собственную частоту колебаний тел качения λ1, которые выбирают из соотношений
C=(Cx+Cy)/2 - усредненная жесткость упругой системы,
Mпр=M1M2/(M1+M2) - приведенная масса системы,
ν - безразмерный параметр, определяющий собственную частоту тел качения.
2. Способ возбуждения резонансных механических колебаний по п.1, отличающийся тем, что для возбуждения колебаний по эллиптическим траекториям жесткости Сх, Су выбирают различными, но так, чтобы собственные частоты 
3. Способ по п.1, отличающийся тем, что для возбуждения поступательных резонансных противофазных колебаний масс M1 и М2 по круговым траекториям жесткость упругой системы выбирают изотропной Сх=Су=С.
4. Устройство для возбуждения резонансных механических колебаний, содержащее колебательную систему в виде соединенного с основанием упругими связями рабочего органа общей массой M1 и установленного на нем параметрического вибровозбудителя, в котором на валу электродвигателя закреплен уравновешенный ротор с парой незамкнутых круговых беговых дорожек, расположенных симметрично относительно двух взаимно перпендикулярных его диаметров, их центры смещены от оси вращения ротора на одинаковые расстояния в сторону беговой дорожки, а в беговых дорожках размещены одинаковые уравновешенные тела качения, ротор выполнен из набора одинаковых дисков, в смежных дисках оси обкатки тел качения повернуты вокруг оси вращения ротора на одинаковый угол γ=π/S, где S - число дисков одного ротора, а колебательная система выполнена с возможностью перемещения рабочего органа по осям Х и Y, отличающееся тем, что введена реактивная масса М2, соединенная с рабочим органом и основанием упругими связями, рабочий орган снабжен, по меньшей мере, двумя полыми цилиндрами, которые размещены на нем симметрично относительно оси вращения ротора, а в полости цилиндров свободно вложены цилиндрические ролики с возможностью обкатки внутри полостей.
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2410167C1 |
| ВИБРОВОЗБУДИТЕЛЬ | 1994 |
|
RU2072660C1 |
| ВИБРОДВИЖИТЕЛЬ | 2007 |
|
RU2348467C1 |
| УПРУГАЯ СИСТЕМА ВИБРАЦИОННОГО УСТРОЙСТВА | 1992 |
|
RU2038997C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕГУЛИРУЕМЫЙ ВИБРАТОР | 2004 |
|
RU2295396C2 |
| Способ изготовления полых изделий со ступенчатой внутренней поверхностью | 1984 |
|
SU1263396A1 |

