Изобретение относится к области измерений механической силы и связанных с ней величин: момента силы, давления, массы, деформаций, линейных и угловых ускорений. Известен пьезорезонансный датчик (см. заявку №200/324393 от 04.08.2003, опубликованную в БИ №4 от 10.02.2005), который является наиболее близким по технической сущности к заявленному устройству и взят в качестве прототипа.
Резонатор с изгибной формой колебаний выполнен в виде, по крайней мере, одного стержня, концы которого жестко соединены с участками приложения измеряемой силы. Недостатком прототипа являются ограниченные возможности получения высокой чувствительности при минимальных размерах резонатора вследствие уменьшения его добротности.
Решаемой технической задачей является создание устройства с более высокой чувствительностью и большей добротностью.
Техническим результатом является уменьшение критической силы стержня и его резонансной частоты за счет изменения формы изгибных колебаний резонатора. Технический результат достигается тем, что резонатор силочувствительный выполнен, по крайней мере, в виде одного стержня, концы которого жестко соединены с участками приложения измеряемой силы. Новым является то, что в средней части и на одном из концов стержня образованы упругие шарниры, при этом ширина участка стержня, заключенного между упругими шарнирами, больше ширины остального участка стержня.
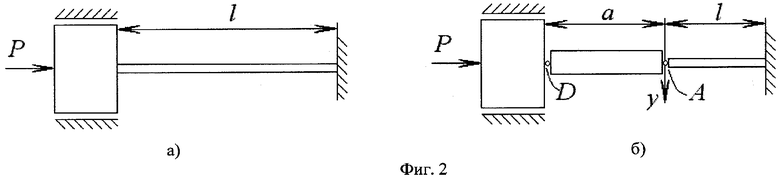
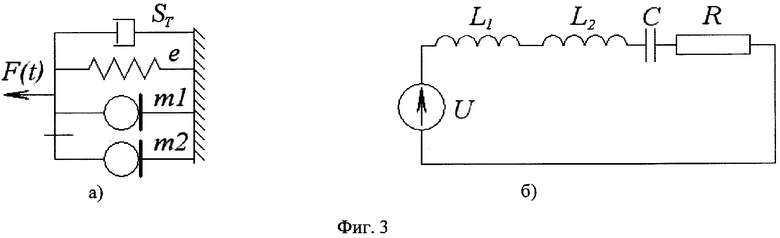
На фиг.1а) изображена форма резонатора, выполненного из пластины в виде одного стержня; на фиг.1б) изображен резонатор, выполненный в виде системы из двух стержней с объединенными концами (двухветвевой камертон). На фиг.2а) представлена кинематическая схема стержня, нагруженного продольной силой Р, соответствующая стержневому резонатору прототипа; на фиг.2б) представлена кинематическая схема резонатора согласно изобретения, нагруженного продольной силой Р. На фиг.3а) представлена эквивалентная механическая схема резонатора согласно предлагаемому изобретению, а на фиг.3б) его электрическая эквивалентная схема по первой системе электрических аналогий.
Резонатор на фиг.1а), б) образован из следующих монолитно соединенных элементов: участки стержней 1, 2 с образованием между ними упругого шарнира 3; концы стержней соединены с участками 4, 5 приложения измеряемой силы F, при этом в местах перехода участков стержней 2 к участку 4 приложения измеряемой силы образованы упругие шарниры 6, а участок 5 жестко соединен с другим концом стержня на участке 1. У варианта исполнения резонатора в виде двухветвевого камертона объединенные концы стержней участков 1 соединены с участком 5 приложения измерительной силы при помощи ножки 7, ширина стержней на участке 2 имеет большее значение, чем у участков 1. На поверхности стержней при помощи методов металлизации (напыление, гальваническое осаждение и т.п.) нанесены электроды электромеханического преобразователя (на фиг.1 не изображены). В зависимости от физических свойств используемого в резонаторах материала электромеханические преобразователи для возбуждения и регистрации его колебаний могут быть пьезоэлектрического, магнитоэлектрического или электромагнитного типа, их принцип действия описан в технической литературе, в частности в книгах П.В.Новицкий и др. "Цифровые приборы с частотными датчиками", "Энергия" 1970 г., стр.136-141; или Г.А.Филатов и др. "Малогабаритные низкочастотные механические фильтры", "Связь" 1974 г., стр.33-74.
Импеданс электромеханического преобразователя по электрической стороне на частоте механического резонанса резонатора принимает экстремальные значения относительно значений за пределами резонансных частот, это используется для построения генераторов электрических сигналов с частотой генерации, равной частоте механического резонанса. Устройство работает следующим образом. Процесс резонансных изгибных колебаний стержневых резонаторов так же, как и у резонаторов других типов, сопровождается обменом потенциальной и кинетической энергий между двумя реактивными элементами системы с распределенными параметрами:
эквивалентной упругостью и эквивалентной массой; часть энергии теряется на трение в материале стержня при его деформации изгиба и в местах крепления концов стержня (см. эквивалентную схему фиг.3а). Использование в качестве резонатора системы из двух стержней с объединенными концами, совершающих противофазные изгибные колебания, позволяет уменьшить потери на трение в местах присоединения концов, к участкам приложения измеряемой силы увеличив, тем самым, добротность резонатора (выполнение резонатора в виде двухветвевого камертона).
При приложении к концам стержня (участки 4, 5 фиг.1) измеряемой силы частота механического резонанса изменяется, и соответственно изменяется частота генерации генератора, к которому подключен механический резонатор через его электромеханический преобразователь. Значение частоты механического резонанса f стержневого резонатора с изгибной формой колебаний для первой моды при действии на него продольной силы определяется следующим выражением:

где Р - продольная сила;
f0 - значение резонансной частоты при Р=0;
В - величина, обратная критической силе Ркр стержня резонатора (продольная сила, при которой стержень теряет устойчивость).
Функция преобразования силочувствительного резонатора, выраженная через относительное изменение его резонансной частоты (относительная девиация)  при значениях ВР в подкоренном члене выражения (1) не более 0,1 в первом приближении может быть представлена линейным членом разложения в степенной ряд функции
при значениях ВР в подкоренном члене выражения (1) не более 0,1 в первом приближении может быть представлена линейным членом разложения в степенной ряд функции 
В функции преобразования (2) конструктивные параметры (линейные размеры стержня резонатора, физические характеристики материала, условия крепления концов) присутствуют в неявном виде в выражении для величины В (обратной величине критической силы Ркр). Используя известное общее выражение для критической силы:
Получим функцию преобразования (2) в виде:
где l - длина стержня резонатора;
μ - коэффициент приведения длины стержня, определяется условиями крепления его концов;
Е - модуль упругости материала стержня;
j - момент инерции стержня.
Для резонаторов с прямоугольным сечением, получивших наиболее широкое применение, выражение для момента инерции j имеет вид:
где b - ширина стержня;
h - толщина стержня (изгибные колебания в плоскости l, h).
Тогда с учетом выражения (4) и закона Гука: σ=Еε(σ - механические напряжения в стержне под действием измеряемой силы Р; ε - относительная деформация стержня) функция преобразования будет иметь вид:
где 
Функцию преобразования (6) можно представить и как зависимость от относительной деформации ε:
Выражения (6) и (7) для относительной девиации резонансной частоты силочувствительных резонаторов позволяют производить сравнительные оценки различных конструкций стержневых резонаторов, отличающихся размерами, условиями крепления концов стержней, физическими характеристиками материалов (модуль упругости Е, предельные напряжения σпр). В зависимости от режима применения: режима заданной силы или режима заданной деформации используют формулу (6) или (7) соответственно.
В формулах (6) и (7) множители перед σ и ε являются коэффициентами относительной чувствительности к механическому напряжению Сσ и относительной деформации Cε резонатора, обусловленные действием продольной измеряемой силы или заданной деформацией, соответственно.
Как видно из выражений (8) и (9), чувствительность зависит от квадрата отношения длины стержня резонатора к его толщине l/h, коэффициента приведения длины μ, определяемого условиями крепления концов стержня и модуля упругости материала стержня для режима заданной силы. Возможность получения максимальной чувствительности ограничена максимальным значением отношения l/h, которое для стержневого резонатора должно быть меньше 300, т.к. для больших значений стержневой резонатор переходит в класс струнных резонаторов, требующих наличия начального натяжения струны. Другим ограничением повышения чувствительности за счет вариации размеров резонатора - уменьшения толщины h является уменьшение добротности резонатора и уменьшение эффективности электромеханического преобразователя (для резонаторов с пьезоэлектрическим преобразователем).
Еще одним конструктивным параметром, влияющим на чувствительность резонатора, является коэффициент приведения длины μ. У резонатора-прототипа с жестким креплением концов к участкам приложения измеряемой силы значение коэффициента μ равно 0,5; при замене жесткого крепления одного из концов на шарнирное коэффициент μ увеличивается до 0,7, что позволяет в два раза увеличить относительную чувствительность при прочих равных конструктивных параметрах.
Выполнение еще одного упругого шарнира на участке между шарнирно закрепленным концом и другим жестко закрепленным концом (см. фиг.2б) при сохранении длины участка стержня между жестко закрепленным концом и шарниром в средней части, равной длине стержня резонатора-прототипа (фиг.2а), позволяет дополнительно увеличить коэффициент приведения длины μ (уменьшить критическую силу Ркр). В книге В.И.Феодосьева "Сопротивление материалов", изд. "Наука", г.Москва, 1974, стр.446-447 представлено решение задачи по определению критической силы для кинематической схемы фиг.2б. Результатом является трансцендентное уравнение:
при этом через к2 обозначено отношение

С учетом общего выражения Ркр (3) формула для коэффициента приведения μ будет иметь вид:
Эффективность предлагаемого технического решения, в части увеличения чувствительности, может быть продемонстрирована на примере одного из возможных вариантов исполнения резонатора, у которого длина а - жесткой части стержня (шатуна), расположенного между двумя шарнирами, равна длине остальной части стержня l, расположенной между упругим шарниром в средней части и жестко закрепленным концом; т.е.
Решением уравнения (12) является значение kl≈1,165. Для значения kl≈1,165 коэффициент приведения длины будет равен: μ≈2,70.
У резонатора прототипа с жестким креплением концов с равномерным сечением по длине стержня, как указывается выше, коэффициент приведения длины равен 0,5.
Выигрыш по чувствительности, определяемой относительной девиацией, предлагаемого технического решения относительно прототипа может быть выражен через отношение коэффициентов чувствительности резонаторов (при равенстве общих условий):
Или
Критерием равенства условий при сравнении предлагаемого технического решения с прототипом является:
- равенство размеров по длине стержней между точками крепления концов;
- равенство толщины стержней;
- равенство значений модуля упругости Е материалов стержней. Присвоив индекс 1 характеристикам предлагаемого резонатора и индекс 2 характеристикам резонатора прототипа, с учетом равенства общих условий выражения (13), (14) примут вид:
при этом

где L - длина стержня резонатора-прототипа между точками соединения его концов с участками приложения измеряемой силы;
а - размер жесткого участка 2 резонатора, согласно предлагаемому техническому решению, расположенного между упругими шарнирами 3, 6 (см. фиг.1).
Для варианта выполнения предлагаемого резонатора с отношением  значение μ1, как указывалось выше, равно 2,7 (коэффициент μ2 прототипа равен 0,5), значение отношения (15) равно:
значение μ1, как указывалось выше, равно 2,7 (коэффициент μ2 прототипа равен 0,5), значение отношения (15) равно:
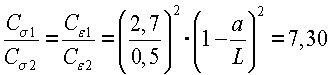
Таким образом, выполнение упругих шарниров в месте соединения одного из концов стержня резонатора с участком приложения измеряемой силы и в средней части позволяет, при прочих равных условиях, в несколько раз повысить коэффициент преобразования (чувствительность). Приведенный выше качественный анализ проверялся моделированием на ЭВМ с использованием метода конечных элементов. Результаты моделирования подтвердили существенный выигрыш по чувствительности предлагаемого технического решения по сравнению с прототипом.
Выполнение упругих шарниров 3, 6 на стержнях резонатора согласно предлагаемому техническому решению (фиг.1а, б) позволяет не только увеличить чувствительность, но и увеличить его добротность. Это обусловлено уменьшением резонансной частоты за счет изменения формы изгибных колебаний резонатора.
Механическая система согласно фиг.2б эквивалентна консольному стержню длиной l с сосредоточенной массой на конце, пропорциональной массе шатуна длиной а. Угловое перемещение шатуна θ определяется поперечным перемещением Y шарнирного соединения шатуна со стержнем l (точка А фиг.2б). Влияние шатуна на колебания в механической системе фиг.2б проявляется в виде силы Рш, действующей в точке соединения шатуна с участком стрежня длиной l - точке А; при этом:
где Мш - момент, обусловленный угловым ускорением шатуна;
jш - момент инерции шатуна относительно оси вращения (точка D фиг.2б).
Для варианта выполнения шатуна в виде однородного, с равномерным по длине а сечением b·h, стержня момент инерции равен:
где mш - масса шатуна.
Учитывая, что  - выражение (17) с учетом (18) принимает вид:
- выражение (17) с учетом (18) принимает вид:
где  - эквивалентная масса шатуна.
- эквивалентная масса шатуна.
Таким образом, система с жестким шатуном фиг.2б эквивалентна консольному стержню с сосредоточенной массой на его свободном конце со значением, равным 1/3 массы шатуна (для однородного с равномерным по длине сечением шатуна). Ее эквивалентная механическая схема может быть представлена в виде параллельно соединенных: упругого элемента с податливостью е (см. фиг.3а) двух масс - эквивалентной массы шатуна  и эквивалентной массы консольного стержня
и эквивалентной массы консольного стержня  и сопротивления трения SТ.
и сопротивления трения SТ.
Анализ эквивалентной механической схемы фиг.3а удобно проводить с привлечением метода электромеханических аналогий. При использовании первой системы электромеханических аналогий параллельное соединение механических элементов: двух масс m1, m2, податливости е и сопротивления трения SТ (см. фиг.3а), представляется в виде последовательного соединения их аналогов - индуктивностей L1, L2, конденсатора С и активного сопротивления R, соответственно (см. фиг.3б); силе F(t), приложенной к параллельно соединенным механическим элементам, эквивалентен источник ЭДС, включенный последовательно с электрическими элементами - аналогами. Выражения для добротности Qэ последовательного электрического резонансного контура (фиг.3б) и механического контура Qм (фиг.3а) имеет вид:


где

 - значения резонансных частот электрического и механического контуров соответственно,
- значения резонансных частот электрического и механического контуров соответственно, 
ρэ, ρм - волновые сопротивления электрического и механического контуров;
m1, m2 - эквивалентные массы кинематической системы, соответствующие эквивалентной массе консольно-закрепленного стержня длиной l и эквивалентной массе шатуна.
Из выражения (21) следует: при постоянстве значений податливости е консольно закрепленного стержня и соответственно его сопротивления ST добротность системы растет с ростом суммы эквивалентных масс стержня l и шатуна а. Эффективность согласно предлагаемого технического решения в части увеличения добротности можно выразить через отношение добротностей двух механических систем: резонатора с шатуном с эквивалентной массой m2 и резонатора с невесомым шатуном (m2=0), эквивалентного консольно-закрепленному стержню.
где m1 - эквивалентная масса консольно закрепленного стержня.
Кроме увеличения силовой чувствительности и добротности резонатора предлагаемое техническое решение позволяет повысить эффективность электромеханического преобразователя пьезоэлектрического типа. При изгибных колебаниях резонатора-прототипа знак механических напряжений от его деформаций дважды меняется по длине стержня. Нейтральные сечения, разделяющие участки стержня с разными знаками механических напряжений, находятся на расстоянии 0,224 общей длины от мест крепления концов стержня. Наибольшие механические напряжения находятся в зоне крепления концов и поэтому электроды электромеханического преобразователя пьезоэлектрического типа размещают на участках с максимальными механическими напряжениями; длина этих участков меньше 0,224 от общей длины стержня. Выполнение упругого шарнира в средней части стержня существенно меняет характер распределения механических напряжений по его длине при изгибных колебаниях стержня; зоны с одним знаком механических напряжений охватывают большую часть стержня, а нейтральные сечения будут располагаться вблизи упругого шарнира. Это позволяет расширить зону размещения электродов пьезоэлектрического преобразователя, повысив эффективность его работы (уменьшить эквивалентное сопротивление резонатора).
Дальнейшее повышение эффективности работы пьезоэлектрического типа может быть достигнуто за счет выполнения участка стержня 1, расположенного между жестко соединенным концом с участком 5 приложения измеряемой силы и упругим шарниром 3 в средней части, с уменьшающейся плавно или ступенчато шириной (в направлении от участка 5 к шарниру 3). Повышение эффективности при переменной ширине участка 1 является следствием выравнивания по длине механических напряжений. Был изготовлен образец, который подтвердил работоспособность устройства, относительная девиация (чувствительность) увеличена не менее чем в три раза, а добротность возросла в два раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2013 |
|
RU2541375C1 |
| РЕЗОНАТОР ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 2006 |
|
RU2302007C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2410705C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2415441C1 |
| Микроэлектромеханический первичный преобразователь ускорения | 2017 |
|
RU2657351C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2014 |
|
RU2579552C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2004 |
|
RU2281515C1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2003 |
|
RU2247993C2 |
| ПЬЕЗОРЕЗОНАНСНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ | 2004 |
|
RU2282837C2 |
| ЧАСТОТОРЕЗОНАНСНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ И ЧАСТОТОРЕЗОНАНСНЫЙ ДАТЧИК ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ | 2017 |
|
RU2690699C1 |
Изобретение относится к области измерений механической силы и производных от нее величин, момента силы, давления, массы, деформаций, линейных и угловых ускорений. Резонатор силочувствительный выполнен из одного стержня или системы из двух стержней с объединенными концами, образующих двухветвевой камертон. В средней части стержня и у одного из концов выполнены упругие шарниры. Часть стержня, заключенная между упругими шарнирами, выполняется с большей изгибной жесткостью, чем остальная часть. Техническим результатом является повышение относительной чувствительности, добротности резонатора и эффективности работы. 3 ил.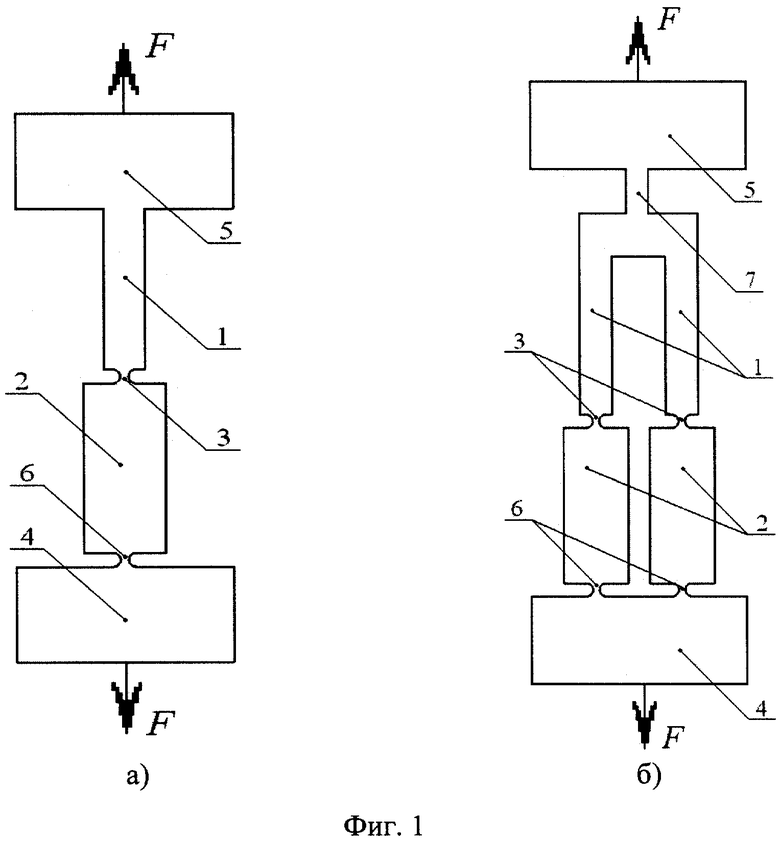
Резонатор силочувствительный с изгибной формой колебаний, выполненный, по крайней мере, в виде одного стержня, концы которого жестко соединены с участками приложения измеряемой силы, отличающийся тем, что в средней части и на одном из концов стержня образованы упругие шарниры, ширина участка стержня, заключенная между упругими шарнирами, больше ширины остального участка стержня, при этом участки стержня монолитно соединены.
| RU 2003124393 А, 10.02.2005 | |||
| ТУРИЧИН A.M | |||
| Электрические измерения неэлектрических величин | |||
| - М.-Л.: Энергия, 1966, с.504-508 | |||
| ФЕОДОСЬЕВ В.И | |||
| Сопротивление материалов | |||
| - М.: Наука, 1974, с.443-447 | |||
| US 4221131 А, 09.09.1980 | |||
| US 5095763 А, 17.03.1992. |

