Изобретение относится к управлению электроприводами механизмов одноковшовых экскаваторов, преимущественно электроприводами копающего механизма.
Более конкретно оно направлено на ограничение динамических нагрузок в копающих механизмах и рабочем оборудовании экскаватора, возникающих в режиме копания, путем воздействия на электроприводы копающих механизмов. Копающие механизмы содержат электроприводы подъема и напора. Каждый из этих приводов обеспечивает так называемые экскаваторные (или упорные) характеристики, которые сами по себе ограничивают максимальные усилия в механизме и рабочем оборудовании, но лишь при медленном приложении нагрузки, т. е. условно в статике.
В данном изобретении идет речь об ограничении динамических усилий, возникающих при внезапном торможении ковша в заборе при копании, когда ковш движется со сравнительно большой скоростью. Исследования показывают, что при скоростях механизма подъема, не превышающих 0,7 от паспортных, для подъема ковша и выдвижении рукоятки со скоростью, не превышающей 0,5 от паспортной, динамические нагрузки при копании не превышают допустимых, т. к. существенную роль в возникновении динамических нагрузок играют усилия, возникающие под влиянием кинематической энергии, запасенной в движущихся частях механизма. Известны способы и устройства для снижения динамических нагрузок, возникающих в режиме копания.
Известно ограничение динамических нагрузок посредством фрикционных устройств, например муфт предельного момента. Они используются в механизме напора. При достижении предельного момента муфта пробуксовывает [1] .
Недостатками этих технических решений являются:
усложнение кинематической цепи и увеличение момента инерции механизма, следовательно, и увеличение динамических нагрузок;
значительная зависимость величины усилия срабатывания фрикционных устройств от внешних условий (температура, состояние трущихся поверхностей и т. п. ). Например, на экскаваторах РLН2300, РLН2800 фирмы Харпишфегер, США, фрикционное устройство помещается в герметизированный кожух, куда подается очищенный воздух;
из предыдущего пункта вытекает трудность настройки и контроля срабатывания фрикционной пары;
ограничение усилий происходит независимо от скорости механизмов подъема и напора, т. е. в условиях, где опасные значения усилий не возникают и происходит лишь снижение эффективности использования экскаватора.
Известны также способ и устройство, основанные на интенсивном снижении (или даже реверсе) питающего напряжения преобразователей приводов копающих механизмов при достижении усилием критической величины, близкой и стопорному усилию статической механической характеристики. Этот способ и устройство приняты за прототип [2] .
Недостатки этого способа заключаются в том, что приходится выбирать критическое значение усилия вблизи стопорного, во всяком случае не менее усилия осечки. При этом снижается только та составляющая динамического усилия, которая связана с электромагнитным моментом приводных двигателей копающего механизма. На вторую составляющую указанных нагрузок, связанную с кинематической энергией движущихся масс, указанный способ не влияет и, следовательно, не исключается возможность возникновения недопустимых усилий в механизмах и рабочем оборудовании.
Кроме того, ограничение усилий происходит независимо от скорости механизма подъема и напора, что снижает эффективность работы экскаватора в режимах, где скорости подъема и напора на выдвижение рукоятки соответственно ниже 0,7 и 0,5 от паспортных. Таким образом, задачей заявляемого изобретения является создание способа управления копающими механизмами, воздействующего на обе составляющие динамического усилия, т. е. связанные с электромагнитным моментом и с кинематической энергией, запасенной в движущихся частях механизма. Кроме того, ограничения усилий должно иметь место только при скорости подъема не менее 0,7 паспортной и напора не менее 0,5 паспортной.
Целью изобретения является повышение долговечности копающего механизмов и рабочего оборудования путем эффективного снижения динамических усилий.
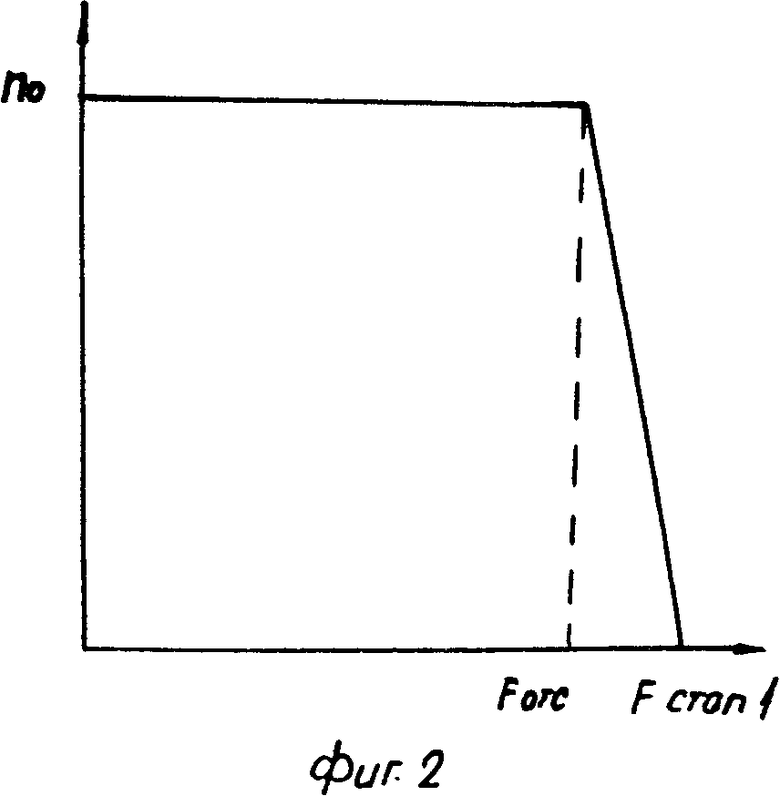
В предлагаемом способе осуществляется новый принцип ограничения динамических усилий. Для этого формирование статических механических характеристик ведут в зависимости от величины задания скорости: при задании скорости менее 0,5-0,7 максимальной величины стопорное усилие ограничивают предельно допустимой величиной F стоп1 по статической характеристике (фиг. 1), а при задании скорости более 0,5-0,7 максимальное стопорное усилие ограничивают величиной 0,7-0,8 предельно допустимого F стоп 2 статической характеристики (фиг. 1).
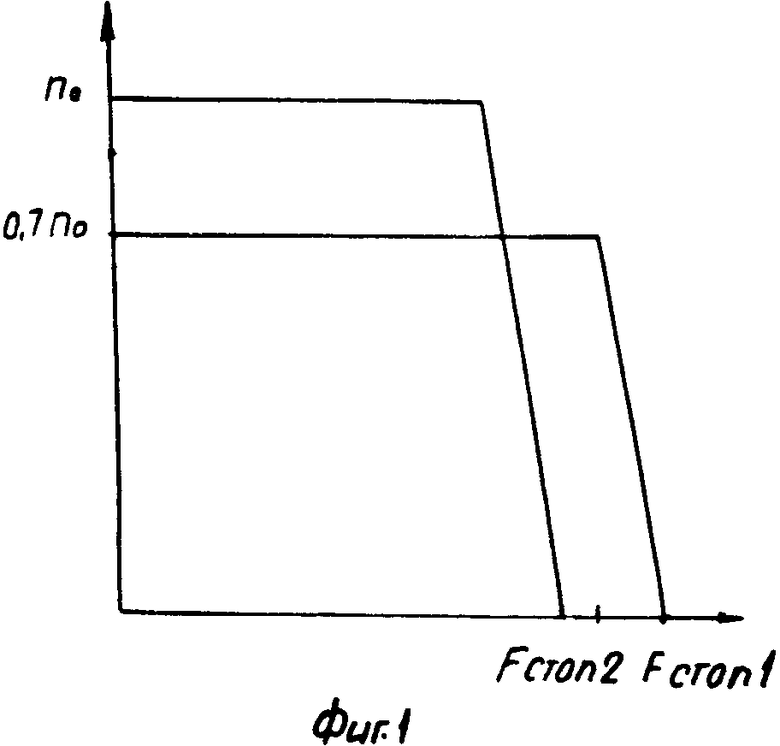
На фиг. 1 и приведены характеристики, поясняющие осуществление способа.
Оператор может задать с помощью командоконтроллера любое значение скорости от нуля до максимальной. Как можно видеть на фиг. 1, характеристики имеют жесткий участок и крутопадающий участок. Такие характеристики называют экскаваторными или упорными. Крутопадаю- щий участок характеристики создается с помощью различных систем токоограничения, например с помощью задержанной обратной связи по току. Оператор по своему выбору может задать любое значение скорости от нуля до максимального. Смысл способа заключается в том, что при задании скорости менее 0,5-0,7 максимальной величины, крутящий момент двигателя ограничивают предельно допустимой величиной F стоп1. Если оператор задает скорость от 0,5-0,7 максимальной до полной, то крутящий момент двигателя ограничивают меньшей величиной, а именно F стоп2 = (0,7-0,8) стоп1. То что изображено на фиг. 1 это, по существу, два семейства характеристик, которыми по своему выбору может пользоваться оператор. Переключение с одного семейства характеристик на другое производится при задании скорости 0,5-0,7 от максимальной.
Реализация способа чрезвычайно проста и не требует специального графического изображения. В командоконтроллере, управляющем механизмом, устанавливается микропереключатель, срабатывающий при положении рукоятки командоконтроллера, соответствующее заданию скорости 0,5-0,7 от максимальной. Микропереключатель шунтирует часть сопротивления в цепи токоограничения и тем самым допустимое значение усилия уменьшается до F стоп 2. При обратном движении рукоятки микропереключатель освобождается и восстанавливается максимальное допустимое стопорное усилие.
Предлагаемый способ имеет следующие преимущества:
исключается возможность возникновения недопустимых динамических усилий, поскольку при больших скоростях (больших 0,5-0,7 максимальных) формируется характеристика со стопорными усилиями 0,7-0,8 максимальных, а при пониженных скоростях (меньших или равных 0,5-0,7 максимальных) формируется характеристика со стопорными усилиями, равными максимальным паспортным;
не требуется ограничение усилий путем реверса привода при скоростях равных или ниже 0,5-0,7 максимальных, что повышает эффективность работы экскаватора, а также не ухудшает коммутацию электрических машин электропривода копающих механизмов (повышается долговечность указанных электрических машин).
Применение предлагаемого способа обеспечивает снижение вероятных максимальных и средних усилий на приводе подъема на 15% -20% , на приводе напора -на 25% . При этом увеличивается ресурс работоспособности поворотной платформы и рабочего оборудования в 8-10 раз при коэффициенте концентрации более 2,8.
Одновременно загрузка по эффективному току электродвигателя подъема снижается на 14% -15% . (56) Ярцев Г. М. и др. Экскаваторы ЭКГ-464 и ЭКГ-4. Конструкция и эксплуатация. М. : Машиностроение, 1970, с. 70
Авторское свидетельство СССР N 1490233, кл. E 02 F 9/20, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА КАРЬЕРНОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347038C2 |
| СПОСОБ УПРАВЛЕНИЯ КОПАЮЩИМ МЕХАНИЗМОМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2001 |
|
RU2211292C2 |
| Устройство для управления копающими механизмами экскаватора | 1981 |
|
SU1076549A2 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
| Способ ограничения динамических нагрузок копающих механизмов экскаваторов и устройство для его осуществления | 1978 |
|
SU765470A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Устройство для управления копающими механизмами экскаватора | 1982 |
|
SU1082916A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
Способ формирования динамических усилий в механизме экскаватора относится к строительной технике и может быть использовано в добывающей промышленности. Сущность изобретения заключается в том, что ограничиваются динамические усилия, возникающие при внезапном торможении ковша в забое при копании, когда ковш движется со сравнительно большой скоростью. Исследования показывают, что при скоростях механизма подъема, не превышающих 0,7 от паспортных, для подъема ковша и выдвижения рукоятки со скоростью, не превышающей 0,5 от паспортной, динамические нагрузки при копании не превышают допустимых, т. к. существенную роль в возникновении динамических нагрузок играют усилия, возникающие под влиянием кинетической энергии, запасенной в движущихся частях механизма. Известны способы и устройства для снижения динамических нагрузок, возникающих в режиме копания. 2 ил.
СПОСОБ ФОРМИРОВАНИЯ ДИНАМИЧЕСКИХ УСИЛИЙ В МЕХАНИЗМЕ ЭКСКАВАТОРА, включающий задание рабочей и возможно максимальной скоростей привода, измерение текущего усилия и сравнения его с заданным, отличающийся тем, что, с целью повышения надежности, задают скорость привода в интервале от минимальной до максимальной, если текущие усилия меньше 0,7 - 0,8 максимально заданного, скорость привода снижают до величины 0,7 - 0,5 максимальной скорости, если текущее усилие превышает 0,7 - 0,8 максимально заданного.

