Изобретение относится к автоматизации управления процессом копания одноковшовых экскаваторов, в особенности экскаваторов типа прямая лопата, имеющих индивидуальный регулируемый электропривод механизмов подъема и напора.
Сущность известных способов [1, 2, 3] автоматизации процесса копания экскаваторов-лопат заключается в поддержании неизменным заданного усилия привода подъема при копании (усилия стабилизации S стаб.) на всем диапазоне регулирования скорости этого привода. Стабилизацию усилия достигают системой управления путем снижения стопорного усилия привода напора при превышении текущего значения усилия приводом подъема заданного значения усилия стабилизации.
На чертеже приведены статические механические характеристики привода подъема при различных скоростях. Точка перехода с жесткой части механической характеристики на крутопадающую часть называется точкой отсечки, а усилие в этой точке усилием отсечки S отсеч. Обычно усилие отсечки составляет 0,5 - 0,8 от значения стопорного усилия привода (S стоп.),
Как показывают исследования, для наиболее эффективного режима копания (при котором обеспечивается наибольшая скорость наполнения ковша, наименьший удельный расход электроэнергии и наименьшие динамические усилия) заданное значение усилия стабилизации привода подъема должно быть равно или близко к значению усилия отсечки (S стаб. = S отс.).
В качестве прототипа принят способ [1] управления копающим механизмом одноковшового экскаватора с регулируемыми приводами напора и подъема, включающий задание усилия стабилизации, измерение суммы величин усилия механизма привода подъема и производной этого усилия, определение рассогласования между значением этой суммы и заданным значением усилия привода подъема, уменьшение величины стопорного усилия привода напора в случае возникновения этого рассогласования.
На чертеже показано усилие стабилизации S стаб. при различных скоростях при реализации способа [1].
Из чертежа видно, что эффективный режим копания по способу [1] можно осуществить только при максимальном задании скорости, где S стаб. равно S отс. На промежуточных скоростях, где S стаб. существенно меньше текущего значения усилия отсечки S oтc.i эффективность копания снижается.
Исследования режима копания экскаваторов-лопат показывают, что скорости привода подъема при копании в зависимости от грансостава забоя, квалификации машиниста меняются в широком диапазоне и обычно колеблются в пределах от 0, 5 до 0,7 от номинальной скорости. Следовательно, при способе [1] эффективность копания будет недостаточной.
Предлагаемое изобретение решает задачу повышения эффективности копания путем изменения текущего значения усилия стабилизации привода подъема одновременно с изменением его скорости, таким образом, чтобы усилие стабилизации S стаб.i на всех скоростях было равно усилию в точке отсечки S oтc.i.
Для решения указанной задачи в способе управления копающим механизмом одноковшового экскаватора с регулируемыми приводами подъема и напора, включающем задание усилия стабилизации привода подъема при копании, измерение суммы величины усилия подъема и производной этого усилия, определение рассогласования между значением этого усилия и значением заданного усилия стабилизации привода подъема, уменьшение величины стопорного усилия привода напора при наличии этого рассогласования согласно изобретению дополнительно измеряют текущее значение скорости привода подъема, определяют рассогласование между максимально возможным значением скорости привода подъема в точке стабилизации и текущим значением скорости, изменяют текущее значение усилия стабилизации одновременно с изменением скорости привода подъема, причем величину усилия стабилизации привода подъема форматируют как сумму значения усилия стабилизации при максимально возможной скорости подъема в точке стабилизации и значения усилия, пропорционального рассогласованию между этим максимальным значением скорости и ее текущим значением.
На чертеже приведены статические механические характеристики привода подъема (1, 2, 3, 4) при различных значениях заданной скорости, поясняющие осуществление способа, где V - скорость, S - усилие в относительных единицах .
Для обеспечения эффективного режима копания текущие значения усилия стабилизации на всех характеристиках должны совпадать с текущим усилием в точках отсечки этих характеристик (или быть близки к ним), должно выполняться условие S стаб.i = S oтc.i .
Из чертежа следует, что с уменьшением заданной скорости (для выполнения условия S стаб.i = S oтc.i ) необходимо увеличивать усилие стабилизации согласно следующему уравнению:
S стаб.i = S стаб. +(V1- Vi) tgα (1),
где V1 - максимально заданное значение скорости; S стаб. - усилие стабилизации при максимальной скорости в точке отсечки; Vi - текущее значение скорости; α - угол наклона характеристики привода подъема. Из уравнения (1) следует, что усилие стабилизации на промежуточной скорости равно сумме значения усилия стабилизации при максимально заданной скорости и значения усилия, пропорционального разности между максимальной скоростью и текущей скоростью, что обеспечивает решение задачи по повышению эффективности копания на всем диапазоне изменения скоростей привода подъема.
Источники информации
1. Авт. св. СССР 732465 кл. Е 02 F 9/20, 1980.
2. Авт. св. СССР 749996, кл. Е 02 F 9/20, 1980.
3. Авт. св. СССР 1430475, кл. Е 02 F 9/20, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Способ управления процессом копания одноковшового экскаватора | 1978 |
|
SU732465A1 |
| Устройство для управления копающими механизмами экскаватора | 1981 |
|
SU1076549A2 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИНАМИЧЕСКИХ УСИЛИЙ В МЕХАНИЗМЕ ЭКСКАВАТОРА | 1991 |
|
RU2007533C1 |
| ПОДВЕСКА СТРЕЛЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1993 |
|
RU2065008C1 |
| Устройство для управления процессом копания карьерного экскаватора | 1989 |
|
SU1624097A2 |
| Тренажер машиниста одноковшового экскаватора | 1985 |
|
SU1260998A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
Изобретение относится к автоматизации управлениям процессом копания одноковшовых экскаваторов, в особенности экскаваторов-лопат, имеющих индивидуальный привод подъема и напора. Техническим эффектом является повышение эффективности копания путем изменения текущего значения усилия подъема одновременно с изменением его скорости таким образом, чтобы усилие стабилизации при всех заданных значениях скоростей было равно усилию в точке отсечки. Для этого задают усилие стабилизации привода подъема при копании и измеряют сумму величины усилия подъема и производной этого усилия. Определяют рассогласование между значением этой суммы и значением заданного усилия стабилизации привода подъема. Уменьшают величину стопорного усилия привода напора при наличии этого рассогласования. Дополнительно измеряют текущее значение скорости привода подъема. Определяют рассогласование между максимальным значением скорости подъема в точке стабилизации и текущим значением скорости. Изменяют текущее значение усилия стабилизации одновременно с изменением скорости привода подъема. Причем величину усилия стабилизации формируют как сумму значения усилия стабилизации при максимальной скорости в точке стабилизации и значения усилия, пропорционального рассогласованию между этим максимальным значением скорости и ее текущим значением. 1 ил.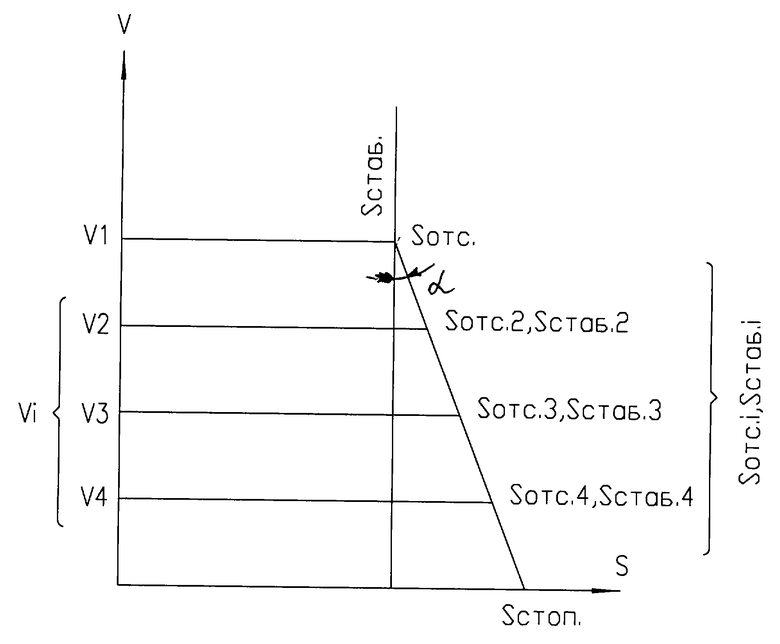
Способ управления копающим механизмом одноковшового экскаватора с регулируемыми приводами подъема и напора, включающий задание усилия стабилизации привода подъема при копании, измерение суммы величины усилия подъема и производной этого усилия, определение рассогласования между значением этого усилия и значением заданного усилия стабилизации привода подъема, уменьшение величины стопорного усилия привода напора при наличии этого рассогласования, отличающийся тем, что дополнительно измеряют текущее значение скорости привода подъема, определяют рассогласование между максимально возможным значением скорости привода подъема в точке стабилизации и текущим значением скорости, изменяют текущее значение усилия стабилизации одновременно с изменением скорости привода подъема, причем величину усилия стабилизации привода подъема формируют как сумму значения усилия стабилизации при максимально возможной скорости подъема в точке стабилизации и значения усилия пропорционального рассогласованию между этим максимальным значением скорости и ее текущим значением.
| Способ управления процессом копания одноковшового экскаватора | 1978 |
|
SU732465A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1502727A1 |
| Устройство управления электроприводом экскаватора | 1990 |
|
SU1733577A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| RU 2055971 C1, 10.03.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ СИСТЕМЫ ГЕНЕРАТОР-ДВИГАТЕЛЬ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1995 |
|
RU2096563C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| GB 2279774 A, 11.01.1995. | |||

