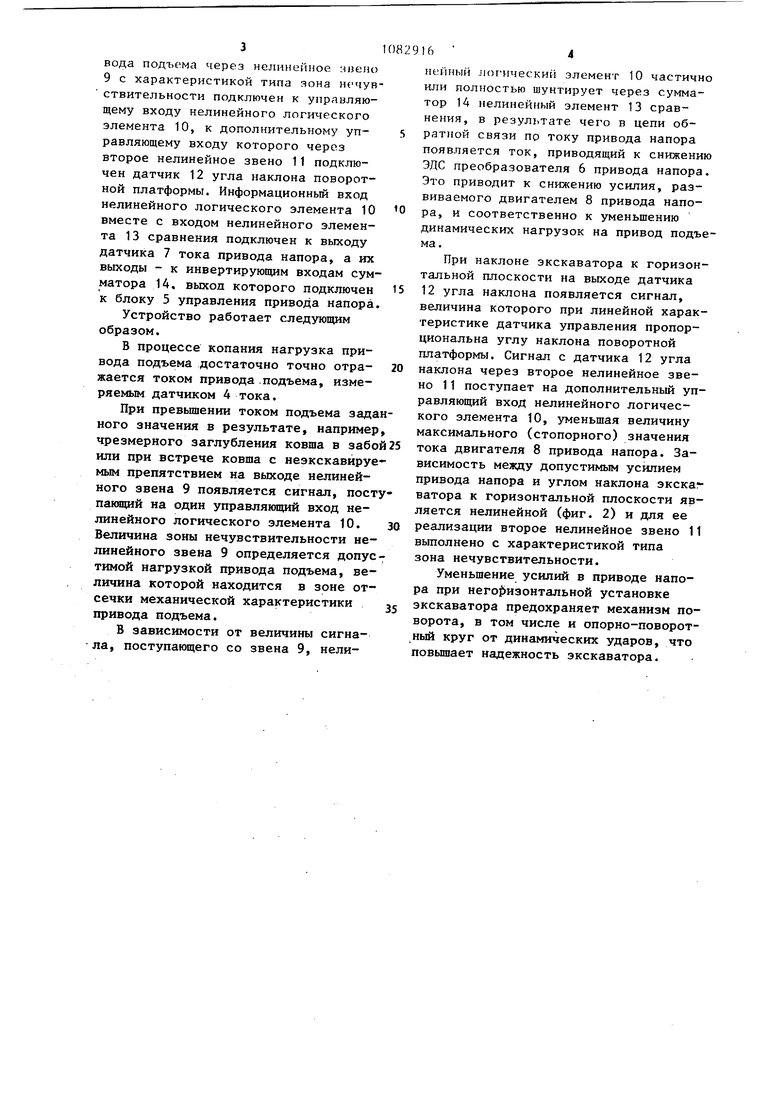
Изобретение относится к системам управления электроприводами рабочих механизмов одноковшового экскаватора, а именно, к устройствам ограничения динамических нагрузок в элементах рабочего оборудования. Наиболее близким к предлагаемому является устройство для управления копающими механизмами экскаватора, содержащее приводы подъема и напора, состоящие из последовательно соединенных блока управления, преобразова теля, датчика тока и двигателя, нели нейное звено с характеристикой типа зона нечувствительности, вход которого подключен к выходу датчика тока привода подъема, а выход подключе к управляющему входу нелинейного логического элемента, информационный вход которого подключен вместе с вхо дом нелинейного элемента сравнения к выходу датчика тока привода напора а выходы нелинейного логического эле мента и нелинейного элемента сравнения подключены к инвертирующим входам сумматора, на неинвертирующий вход которого подается сигнал управления напором, а выход сумматора подключен к входу блока управления привода напора. Известное устройство позволяет поддерживать в процессе копания заданную нагрузку на привод подъема пу тем регулирования напорного усилия. Величина нагрузки привода подъема выбирается при этом равной усилию отсечки его механической характеристики Л . Недостатком такого устройства является то,что значение усилий,раз г виваемых приводами подъема и напора, не корректируется в зависимости от угла наклона платформы экскаватора относительно горизонта. Это приводит к тому, что при работе в условиях наклонных выработок в процессе черпа ния происходит размыкание и замыкани масс поворотной части экскаватора и ходовой тележки, ведущее к локальным динамическим перегрузкам в опорно-поворотном роликовом круге экскаватора, в результате чего снижается надежность механического оборудования и повьшается опасность опрокидывания экскаватора. Цель изобретения - повьшение надежности экскаватора путем уменьшения динамических нагрузок Р механнпмс поворота, возникающих при работе в условиях наклонных выработок, Постанленная цель достигается тем, что устройство для управления копающими механизмами экскватора, содержащее приводы подъема и напора, состоящие из последовательно соединенных блока управления, преобразователя, датчика тока и двигателя, нелинейное звено с характеристикой типа зона нечувствительности, вход которого подключен к выходу датчика тока привода подъема, а выход подключен к управляющему входу нелинейного логического элемента, информационный вход которого подключен вместе с входом нелинейного элемента сравнения к выходу датчика тока привода, а выходы нелинейного логического элемента и нелинейного элемента сравнения подключены к инвертирующим входам сумматора, на неинвертирующий вход которого подается сигнал управления напором, а выход сумматора подключен к входу блока управления привода напора, снабжено датчиком угла наклона поворотной платформы и вторым нелинейным звеном с характеристикой типа зона нечувствительности, а нелинейный логический элемент Снабжен дополнительным управляющим входом, к которому через второе нелинейное звено с характеристикой типа зона нечувствительности подключен датчик угла наклона поворотной платформы. На фиг. 1 изображена структурная схема устройства для управления копающими механизмами экскаватора; на фиг. 2 - полученный путем графоаналитического построения закон изменения максимального движущего усилия, развиваемого приводом напора, исходя из условия устойчивого равновесия опорно-поворотного роликового круга при изменении угла наклона поворотной платформы относительно горизонта. Устройство состоит из привода подъема, вьтолненного по системе управляемый преобразователь - двигатель, включающего блок 1 управления с преобразователем 2 и подключенным к нему двигателем 3 подъема с датчиком 4 тока привода подъема. Привод напора включает блок 5 управления, преобразователь 6 и датчик 7 тока двигателя 8. Сигнал с датчика 4 при310
вода подъема через нелинейное ннено 9 с характеристикой типа зона нечувствительности подключен к управляющему входу нелинейного логического элемента 10, к дополнительному управляющему входу которого через второе нелинейное звено 11 подключен датчик 12 угла наклона поворотной платформы. Информационный вход нелинейного логического элемента 10 вместе с входом нелинейного элемента 13 сравнения подключен к выходу датчика 7 тока привода напора, а их выходы - к инвертирующим входам сумматора 14, выхол которого подключен к блоку 5 управления привода напора.
Устройство работает следующим образом.
В процессе копания нагрузка привода подъема достаточно точно отражается током привода .подъема, измеряемым датчиком 4 тока.
При превышении током подъема заданного значения в результате, например, чрезмерного заглубления ковша в забой или при встрече ковша с неэкскавируемым препятствием на выходе нелинейного звена 9 появляется сигнал, поступающий на один управляющий вход нелинейного логического элемента 10. Величина зоны нечувствительности нелинейного звена 9 определяется допустимой нагрузкой привода подъема, величина которой находится в зоне отсечки механической характеристики привода подъема.
В зависимости от величины сигнала, поступающего со звена 9, нели16 4
нейный лспический элемент 10 частично или полностью шунтирует через сумматор 14 нелинейный элемент 13 сравнения, в результате чего в цепи обратной связи пр току привода напора появляется ток, приводящий к снижению ЭДС преобразователя 6 привода напора. Это приводит к снижению усилия, развиваемого двигателем 8 привода напора, и соответственно к уменьшению динамических нагрузок на привод подъема.
При наклоне экскаватора к горизонтальной плоскости на выходе датчика 12 угла наклона появляется сигнал, величина которого при линейной характеристике датчика управления пропорциональна углу наклона поворотной платформы. Сигнал с датчика 12 угла наклона через второе нелинейное звено 11 поступает на дополнительный управляющий вход нелинейного логического элемента 10, уменьшая величину максимального (стопорного) значения тока двигателя 8 привода напора. Зависимость между допустимым усилием привода напора и углом наклона экскаг ватора к горизонтальной плоскости является нелинейной (фиг. 2) и для ее реализации второе нелинейное звено 11 выполнено с характеристикой типа зона нечувствительности.
Уменьшение усилий в приводе напора при него)изонтальной установке экскаватора предохраняет механизм поворота, в том числе и опорно-поворотный круг от динамических ударов, что повьш1ает надежность экскаватора.
iui.i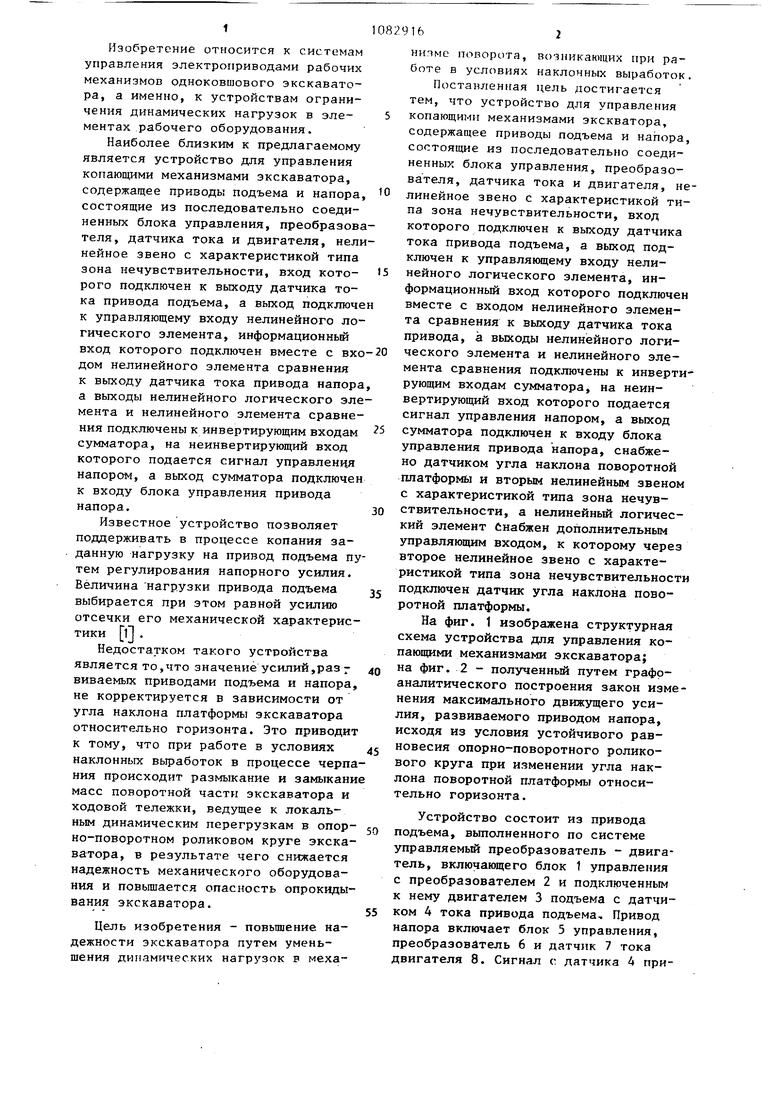
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления копающими механизмами экскаватора | 1981 |
|
SU1076549A2 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Способ управления копающими механизмами экскаватора в транспортном режиме | 1985 |
|
SU1240839A1 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Устройство управления приводом одноковшевого экскаватора | 1974 |
|
SU600263A2 |
| Устройство для измерения углового отклонения ковша экскаватора от вертикальной плоскости | 1983 |
|
SU1121357A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство для управления процессом копания экскаватора-дреглайна | 1984 |
|
SU1182127A2 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОПАЮЩИМИ МЕХАНИЗМАМИ ЭКСКАВАТОРА, содержащее приводы подъема и напора, состоящие из последовательно соединенных блока управления, преобразователя, датчика тока и двигателя, нелинейное звено с характеристикой типа зона нечувствительности,вход которого подключен к выходу датчика тока привода подъема, а выход подключен к управляющему входу нелинейного логического элемента, информационный вход которого подключен вместе с входом нелинейного элемента сравнения к выходу датчика тока привода напора, а выходы нелинейного логического элемента и нелинейного-элемента сравнения подключены к инвертирующим входам сумматора, на неинвертирующий вход которого подается сигнал управления напором, а выход сумматора подключен к входу блока управления привода напора, отличающеес я тем, что, с целью повьшения надежности экскаватора путем уменьшения динамических нагрузок в мезанизме поворота, возникающих при работе в условиях наклонных выработок, оно (Л снабжено датчиком угла наклона поворотной платформы и вторым нелинейным звеном с характеристикой типа зона нечувствительности, а нелинейный логический элемент снабжен дополнительным управляющим входом, к которому через второе нелинейное звено с эо характеристикой типа зона нечувствию тельности подключен датчик угла наклоГ) на поворотной платформы. 35
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
