l1:)f)iureHne ortiocurcH к системам yii р,ч1.1(иин члектроириволами копаюших механизмов одноковшового экскаватора, g HMfiiiH) к устройствам ог)аниче11ия динамических нагрузок в механизме рабочего оборудования.
11о основному авт. св. № 749996 известно устройство для управления копающими механизмами экскаватора, содержащее э.юктроприводы подъе.ма и напора, системы управления ими, датчик тока якорной цепи привода подъема, элемент сравнения в цепи обратной связи lio току привода и по следовательно соединенные нелинейное звено с зоной нечувствительности и нелинейный логический элемент. Выходы нелинейного логического элемента подключены нарал„чельно элементу сравнения в цепи обратной связи по току привода напора, а управляющий вход соединен с выходом нелинейного звена с зоной нечувствительности, вход которого подключен к датчику тока привода подъема.
Использование данного устройства обеспечивает в процессе копания по.адержание заданного усилия, развиваемого приводом подъема путем регулирования напорного усилия. Значение усилия привода подъема выбирается равным усилию отсечки. Для приводов подъема, имеющих механические свойства характеризующиеся постоянным значением тока (усилия) отсечки, устройство обеспечивает ограничение динамических нагрузок при одновременном использовании максимума мощности привода, расходуемой на резание 1.
Однако у современных экскаваторов электроприводы копающих механизмов механические свойства, характеризующиеся постоянным значением стопорного усилия и различными значениями усилий отсечки. В этом случае известное устройство, поддерживая постоянное усилие привода подъема в процессе копания, не обеспечивает оптимального протекания процесса копалия при промежуточных значениях задающего сигнала (фиг. 2). При этом значение подде7)живаемого усилия привода подъема не корректируется в зависимости от температуры окружающей среды. При работе экскаваторов в условиях Севера надежность )борудования и допустимые нагрузки механическое, оборудование определяются главным образом температурой окружающей среды. Кроме того, известное устройство не учитр вает изменения температуры окружающей среды и поэтому не обеспечивает достаточно эффективного ограничения динамических нагрузок в механизме в зависимости от температуры окружающей среды с оптимизацией процесса копания при промежуточных значениях задающего сигнала.
Поставленная цель достигается тем, что устройство для управления копаюйшми механизмами экскаватора снабжено датчиком температуры окружающей среды и залатчиком скорости привода подъема, причем датчик температуры окружаюп1ей среды включен между датчиком тока якорной цепи привода подъема и вторым входом нели5 нейного звена с зоной нечувствительности, а.выход задатчика скорости привода подъема подсоединен к первому входу нелинейного звена с зоной нечувствительности и входу системы управления привода подъема.
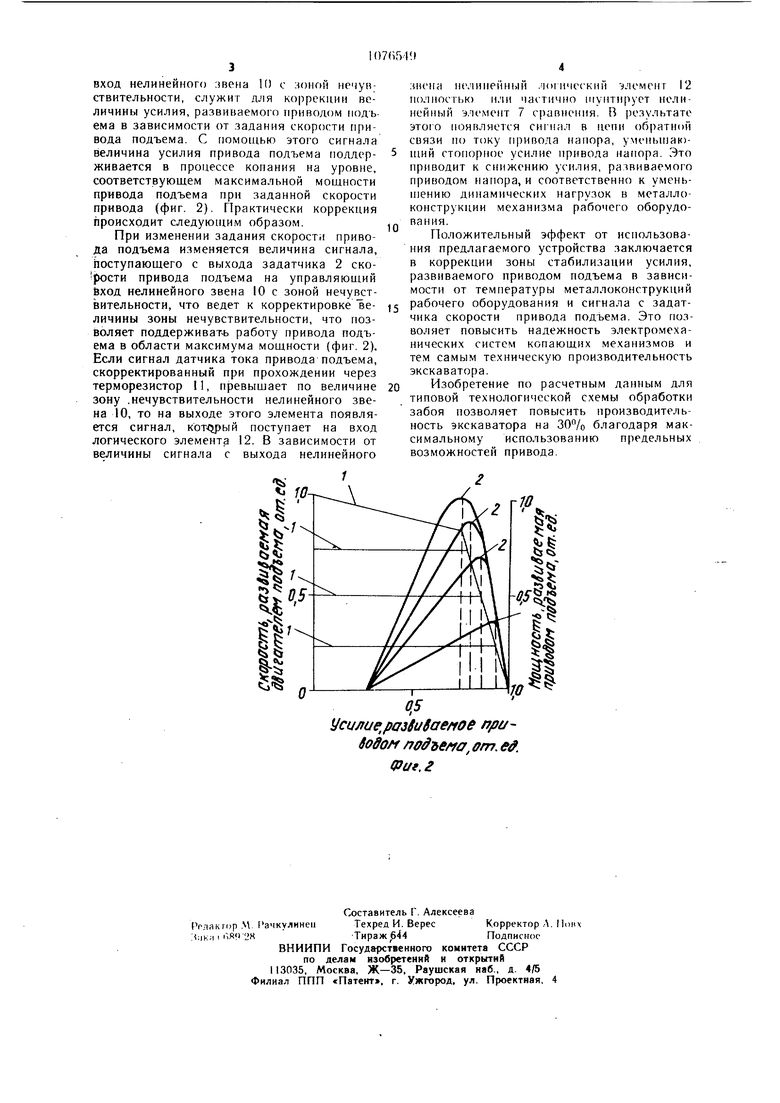
Q На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - механические характеристики привода подъема и зависимости мощности привода от усилия, развиваемого этим приводом.
Устройство для управления копающими
5 механизмами экскаватора содержит электропривод подъема, включающий в себя систему I управления приводом подъема, задатчик 2 скорости привода подъема, управляемый преобразователь 3 с подключенным к нему двигателем 4 подъема и датчик
0 5 тока привода подъема, электропривод напора, включающий в себя систему 6 управления привода напора с нелинейным элементом 7 сравнения в цепи обратной связи по току и управляемый преобразователь 8 с подключенным к нему двигателем 9 напора и регулятор, включающий в себя нелинейное звено 10 с зоной нечувствительности, подключенное входом к выходу датчика 5 тока привода подъема, а управляющим входом - к выходу задатчика 2 скорости привода подъема, датчик II температуры окружающей среды, включенный между датчиком тока якорной цепи привода подъема и вторым входом нелинейного звена 10 с зоной нечувствительности, причем выход нелинейного звена 10 соединен с управляющим входом нелинейного логического элемента 12, а последний включен параллельно нелинейному элементу 7 сравнения.
Устройство работает следующим образом.
При взаимодействии рабочего органа
0 экскаватора с забоем на вход нелинейного звена 10 с зоной нечувствительности поступает сигнал от датчика 5 тока привода подъема, проходящий перед этим через датчик 11 температуры окружающей среды, а на управляющий вход нелинейного звена 10 с
5 зоной нечувствительности - сигнал с выхода задатчика 2 скорости привода подъема. Величина сигнала датчика 5 тока привода подъема и пропорциональная нагрузка на основные элементы копающих механизмов, корректируются в терморезисторе 11 в за0 висимости от температуры металлоконструкции копающих механизмов. Терморезистор II имеет нелинейную характеристику, тангенс угла наклона которой увеличивается с увеличением температуры окружающей среды, что позволяет снижать порог допус5 тимых нагрузок на механизм рабочего обо рудования при понижении температуры.
Сигнал, поступающий с выхода задатчика 2
скорости привода Подъема на управ.пяющий вход нелинейного звена И) с зоной нечувствительности, служит для коррекции величины усилия, развиваемого приводом гюдъема в зависимости от задания скорости привода подъема. С помощью это1о сигнала величина усилия привода подъема поддерживается в процессе копания на уровне, соответствующем максимальной мощности привода подъема при заданной скорости привода (фиг. 2). Практически коррекция происходит следующим образом. При изменении задания скорости привода подъема изменяется величина сигнала, поступающего с выхода задатчика 2 ско рости привода подъема на управляющий йход нелинейного звена 10 с зоной нечувствительности, что ведет к корректировке величины зоны нечувствительности, что позволяет поддерживат-ь работу привода подъема в области максимума мощности (фиг. 2). Если сигнал датчика тока привода подъема, скорректированный при прохождении через терморезистор 11, превыщает по величине зону .нечувствительности нелинейного звена 10, то на выходе этого элемента появляется сигнал, )ый поступает на вход логического элемента 12. В зависимости от величины сигнала с выхода нелинейного :) н(чинейный .loi нчоский элемент 12 полностью нли частично шунтирует нелинейный элемент 7 сравнения. В результате этого мояг ляется сигнал в цепи об1)атн()й связи но току привода напора, умеиьн ак)щий стопорное усилие привода напора. Это приводит к снижению усилия, ратвиваемого приводом напора, и соответственно к уменьн ению динамических нагрузок в металлоконструкции механизма рабочего оборудования. Положительный эффект от использования предлагаемого устройства заключается в коррекции зоны стабилизации усилия, развиваемого приводом подъема в зависимости от температуры металлоконструкций рабочего оборудования и сигнала с задатчика скорости привода подъема. Это позволяет повысить надежность электромеханических систем копающих механизмов и тем самым техническую производительность экскаватора. Изобретение по расчетным данным для типовой технологической схемы обработки забоя позволяет повысить производительность экскаватора на благодаря максимальному использованию предельных возможностей привода.
Усилие,раз8и8аеп06 /yf/Sodoff /lodbCffff от. fff. Фиг, г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Устройство для управления копающими механизмами экскаватора | 1982 |
|
SU1082916A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Способ управления электроприводом напора экскаватора и устройство для его осуществления | 1986 |
|
SU1430475A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1989 |
|
SU1624097A2 |
| Способ управления копающими механизмами экскаватора и устройство для его осуществления | 1982 |
|
SU1105577A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Способ управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1989 |
|
SU1671801A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОПАЮЩИМИ МЕХАНИЗМАМИ ЭКСКАВАТОРА по авт. св. № 749996, отличающееся тем/ что, с целью повышения производительности путем использования максимальной мош.ности, он снабжено дат-.; чиком температуры окружающей среды и задатчиком скорости привода подъема, причем датчик температуры окружающей среды включен между датчиком тока якорной цепи привода подъема и вторым входом нелинейного звена с зоной нечувствительности, а выход задатчика скорости привода подъ- ема подсоединен к первому входу нелиней ; кого звена с зоной нечувствительности и к входу системы управления привода подъема. (Л О5 ел 4ib )
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
