Изобретение относится к электротехнике, в частности к приводу с вентильным управлением и может быть использовано для интенсивного торможения двигателем.
Известен способ динамического торможения асинхронного двигателя (1). Двигатель запитывается от сети через управляемые тиристоры. При торможении тиристоры в одной из фаз двигателя полностью закрыты, а в двух других пропускают ток только в одном направлении. В результате в спектре периодического несинусоидального напряжения, приложенного к двигателю, помимо постоянной составляющей присутствует еще и субгармоническая составляющая сетевого напряжения, вследствие чего формируется результирующая механическая характеристика двигателя, имеющая сколько-нибудь заметный тормозной момент в зоне высоких скоростей. Недостатком данного способа является малая эффективность тормозного воздействия, особенно при снижении скорости вращения ротора.
Наиболее близким по технической сущности является способ торможения двигателя противовключением, заключающийся в переключении на ходу двух фаз обмотки статора, что ведет к перемене направления вращения магнитного поля (2). Ротор при этом вращается против направления движения поля и постепенно замедляется. При достижении угловой скорости ротора нулевого значения двигатель отключается от сети для исключения возможности, но и с другими известными техническими решениями не обнаружены решения, обладающие сходными признаками, что подтверждает соответствие заявляемого технического решения критерию "существенные отличия".
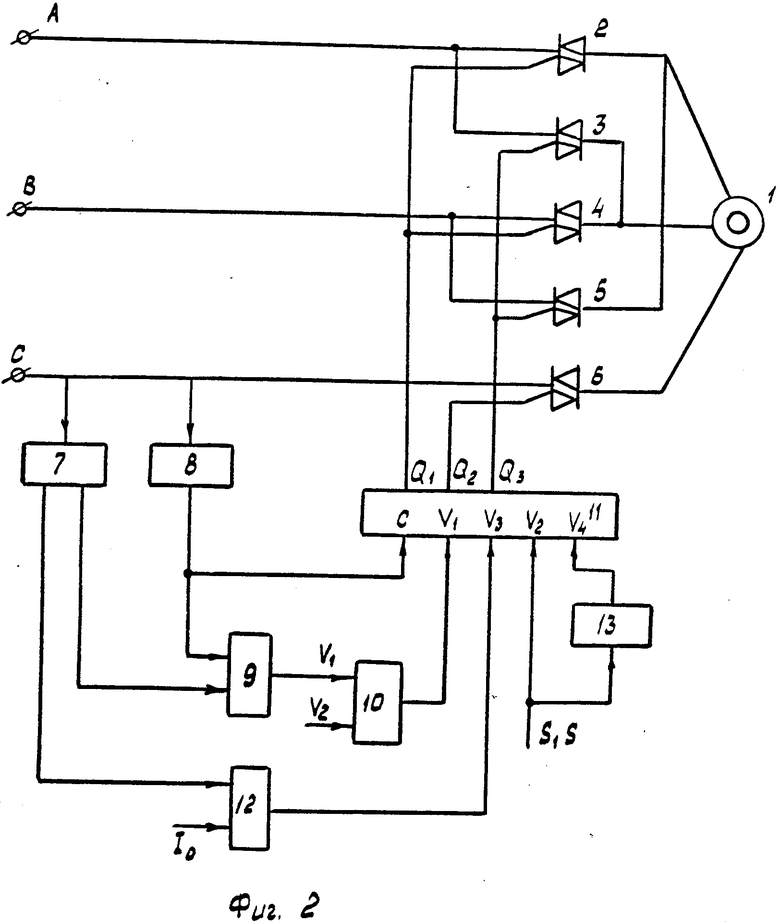
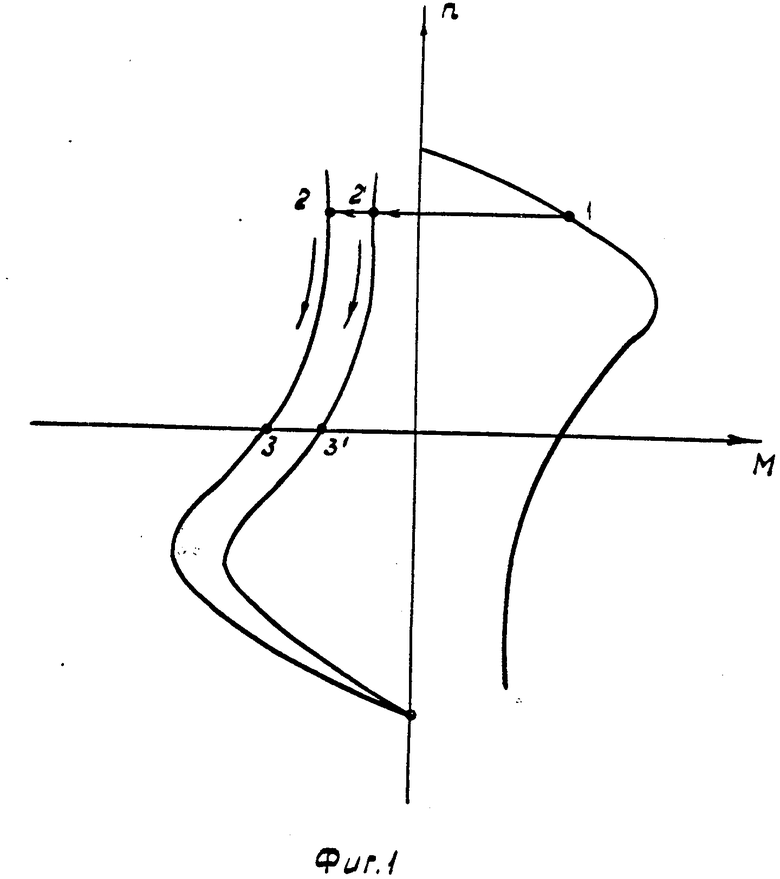
На фиг. 1 представлены кривые, отражающие процесс регулирования двигателя; на фиг. 2 - схема устройства, реализующего предлагаемый способ.
Перед торможением АД работает в точке 1 (см. фиг. 1). При переключении фаз обмотки статора попадаем в точку 2 (режим электромагнитного тормоза) и по моментной характеристике в точке 3, где двигатель необходимо отключить от сети. Снижая напряжение при торможении, мы тем самым снижаем тормозной момент - на АД и, соответственно, снижаются механические и тепловые нагрузки, значительно не уменьшая интенсивности торможения. Коэффициент мощности в точке 2 будет самым низким, т. к.
cos φ =  =
=  а скольжение больше единицы. При скольжении равном единице частота тока, наводимая в роторе, равна частоте поля статора. Поэтому для каждого типа двигателя легко определить коэффициент мощности, соответствующий точке 3 и, соответственно, отслеживания угла сдвига между током и напряжением в фазе можно определить момент подачи сигнала на полное закрытие полупроводниковых приборов вентильного преобразователя (отключая АД от сети).
а скольжение больше единицы. При скольжении равном единице частота тока, наводимая в роторе, равна частоте поля статора. Поэтому для каждого типа двигателя легко определить коэффициент мощности, соответствующий точке 3 и, соответственно, отслеживания угла сдвига между током и напряжением в фазе можно определить момент подачи сигнала на полное закрытие полупроводниковых приборов вентильного преобразователя (отключая АД от сети).
Предлагаемый способ может быть реализован с помощью его разгона в противоположном направлении. Основным достоинством этого способа торможения является очень малое время останова двигателя, т. к. в этом случае двигатель начинает работать в режиме электромагнитного тормоза. Недостатком данного способа торможения является наличие значительных механических и тепловых усилий, которые могут привести к выходу из строя оборудования, а также необходимость наличия механического датчика на роторе для фиксирования момента перехода угловой скорости двигателя через нуль.
Целью данного изобретения является повышение надежности и точности останова двигателя в способе торможения асинхронного двигателя с вентильным преобразователем в цепи статора, при котором переключают две фазы обмотки статора, дополнительно, одновременно с переключением двух фаз обмоток статора устанавливают угол управления вентилями преобразователя равным 90 град. эл, затем сравнивают значение тока в статорной обмотке с заданным значением и при отрицательном знаке результата сравнения увеличивают угол управления вентилями преобразователя до тех пор, пока результат сравнения не достигнет нулевого значения, при этом непрерывно измеряют угол сдвига между током и напряжением в фазе, сравнивают его с заданным значением и, при достижении полученной разницей нулевого значения подают сигнал на полное закрытие вентилей преобразователя.
Снижение механических и тепловых усилий достигается уменьшением тормозного момента на валу двигателя снижением подводимого к АД напряжения. При этом соответственно снижаются и значения токов в обмотках двигателя.
При сравнении заявляемого решения не только с прототипом, устройства, схема которого изображена на фиг. 2 в цепи статора управляемого асинхронного двигателя 1 включен вентильный преобразователь с симисторами 2. . . 6.
Устройство для управления торможением содержит датчик 7 тока, датчик 8 напряжения, датчик 9 угла сдвига фаз тока и напряжения ϕ, блок 10 сравнения, фазосдвигающий блок 11, компаратор 12 и формирователь импульса по перепаду 13.
Симисторы 2,3 первым силовым выводом подключены к фазе А силовой питающей сети, симисторы 4,5 первым силовым выводом подключены к фазе В силовой питающей сети, симистор 6 первым силовым выводом подключен к фазе С силовой питающей сети, симисторы 2,5 вторым силовым выводом подключены к второй фазе статорной обмотки асинхронного двигателя 1, второй вывод симистора 6 подключен к 3-й фазе статорной обмотки асинхронного двигателя, вход датчика 7 подключен к фазе силовой питающей сети, первый выход датчика тока 7 подключен к второму входу датчика 9 угла сдвига фаз, а второй выход датчика тока 7 подключен к входу компаратора 12, вход датчика 8 напряжения подключен к фазе С силовой питающей сети, а выход к первому входу датчика 9 угла сдвига фаз и входу С фазосдвигающего блока 11, выход датчика 9 подключен к первому входу блока 10 сравнения (V1) на второй вход которого (V2) подается сигнал уставки, а выход подключен на вход V1 фазосдвигающего блока 11. На вход V2 блока 11 подается сигнал пуска/останова SS.
Вход V3 блока 11 соединен с выходом компаратора 12 один вход которого соединен с вторым выходом датчика 7, а на второй вход подан сигнал уставки тока 1. Выход Q1 фазосдвигающего блока 11 подключен к выводам управления симисторами 2,4 выход Q2 к выводу управления симистором 6, а выход Q3 к выводам управления симисторами 3,5 причем выводы Q1, Q3 представляют собой каждый два канала для управления симисторами 2,4 и 3,5 по раздельности. К входу V4 фазосдвигающего устройства подключен выход формирователя импульсов по перепаду, на вход которого поступает сигнал включения/отключения SS.
Устройство работает следующим образом.
Датчик тока 7 формирует на своем первом выходе импульс всякий раз, когда ток в фазе С достигает нулевого значения. Датчик 8 напряжения формирует импульс всякий раз, когда напряжение в фазе С достигает нулевого значения. Датчик 9 угла сдвига фаз по импульсам датчиков 7, 8 формирует на выходе сигнал, пропорциональный значению угла, причем при отсутствии импульсов с датчика 7 на выходе датчика 9 формируется сигнал нулевого уровня.
Блок сравнения 10 формирует на выходе сигнал логической "1" при выполнении условия V1 < V2 и сигнал логического нуля при условии V1 > V2, где V1 сигнал на первом входе, а V2 сигнал на втором входе блока 10. Датчик тока 7 на своем втором выходе формирует сигнал пропорциональный току, который поступает на один из входов компаратора 12, на второй вход которого поступает сигнал уставки 1. Компаратор 12 на выходе формирует сигнал пропорциональной разности значения сигнала с датчика 7 и сигнала уставки 1.
ε= I - i Фазосдвигающий блок по импульсам синхронизации, поступающим на вход С, формирует импульсы управления симисторами 2. . . 6 причем при сигнале SS на входе V2, имеющем уровень логической единицы блок 11 формирует импульсы управления на выходах Q1, Q2 с углом управления симисторами равным 0 эл. При сигнале SS на входе V2, имеющем уровень логического нуля и сигнале логической "1" на входе V4 формирует импульсы управления симисторами на выходах Q1, Q3 с углом управления равным 90 эл. При сигнале SS на входе V2, имеющем уровень логического нуля, сигнале логического нуля на входе V4 и при сигнале на входе V1 также имеющем уровень логического нуля блок 11 формирует импульсы управления симисторами на выходах Q1, Q3 с углом управления зависящим от сигнала на входе V3, причем при положительном сигнале на входе V3 угол плавно увеличивается, при отрицательном сигнале угол плавно уменьшается, а при нулевом сигнале перестает изменяться. При сигнале SS на входе V2, имеющем уровень логического нуля и сигнале на входе V1, имеющем уровень логической единицы на всех выводах Q1. . . Q3блока 11 импульсы отсутствуют.
В исходном состоянии сигнал SS имеет нулевой уровень, импульсы управления симисторами отсутствуют, токов в фазах асинхронного двигателя нет, импульсы с выхода датчика 7 отсутствуют, с выхода датчика 9 на первый вход блока 10 сравнения поступает сигнал логического нуля и следовательно на вход V1 фазосдвигающего блока 11 поступает сигнал логической единицы. Устройство в целом находится в устойчивом состоянии.
При изменении уровня сигнала SS на "1" начинают поступать импульсы управления симисторами 2,4,6 (выходы Q1, Q2) с углом управления равным нулю, к двигателю прикладывается полное напряжение сети, двигатель запускается. Для торможения двигателя на вход SS подается сигнал логического нуля. При изменении уровня сигнала SS от "1" до нуля запускается формирователь импульсов по перепаду 13 и на вход V4фазосдвигающего устройства 11 поступает уровень логической "1". При этом начинают работать симисторы 3,5,6 с углом управления равным 90 эл. , т. е. чередование фаз изменится на обратное и к двигателю прикладывается меньшее напряжение. Двигатель начинает тормозиться и угол ϕ начинает уменьшаться. При этом если уставка тока больше, чем текущее значение тока в фазах двигателя, то угол управления симисторами увеличивается, напряжение на двигателе уменьшается, ток уменьшается. Если же уставка тока 1 меньше текущего значения тока, то угол уменьшается, напряжение на двигателе увеличивается. Указанный процесс регулирования угла продолжается до тех пор, пока ток не станет равным 1. В процессе торможения угол ϕ уменьшается. Когда угол ϕ станет равным уставке на выходе блока 10 возникает сигнал логической "1" и импульсы управления симисторами исчезнут. Симисторы закроются, напряжение на двигателе станет равным нулю, двигатель остановится. (56) Авторское свидетельство СССР N 594569, кл. H 02 P 3/24, 1976.
М. Г. Чиликин, А. С. Сандлер Общий курс электропривода, М. , Энергоиздат, 1981, с. 83.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА | 1992 |
|
RU2035121C1 |
| СПОСОБ ЗАЩИТЫ ГЕНЕРАТОРА ОТ ЗАМЫКАНИЙ НА ЗЕМЛЮ В ОБМОТКЕ СТАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096885C1 |
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки | 1987 |
|
SU1555795A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ ЗАМЫКАНИЯ НА ЗЕМЛЮ В ЭЛЕКТРИЧЕСКОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2031507C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЧАСТОТЫ N-ФАЗНЫХ ЭЛЕКТРОАГРЕГАТОВ | 1995 |
|
RU2084077C1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1429270A1 |
| Способ регулирования частоты вращения ротора вентильного электродвигателя | 1990 |
|
SU1721774A1 |
| Вентильный электродвигатель | 1976 |
|
SU649105A1 |
| Вентильный двигатель | 1988 |
|
SU1557663A1 |
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки | 1988 |
|
SU1552330A1 |
Использование: в электроприводах с вентильным управлением. Сущность изобретения заключается в повышении надежности работы привода путем снижения механических и тепловых нагрузок на двигатель и исключения механического датчика на валу машины. Основное отличие от известного способа состоит в том, что одновременно с переключением фаз обмоток статора снижают напряжение на двигателе, управляя полупроводниковыми приборами вентильного преобразователя, непрерывно измеряют угол сдвига между током и напряжением в фазе, сравнивают его с заданным, и по достижении полученной разницы нулевого значения подают сигнал на полное закрытие полупроводниковых приборов вентильного преобразователя. 2 ил.
СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА, при котором переключают две фазы обмотки статора, отличающийся тем, что, с целью повышения надежности и точности останова, одновременно с переключением двух фаз обмоток статора устанавливают угол управления вентилями преобразователя, равный 90 эл. град. , затем сравнивают значение тока в статорной обмотке с заданным значением и при отрицательном знаке результата сравнения увеличивают угол управления вентилями преобразователя до тех пор, пока результат сравнения не достигнет нулевого значения, при этом непрерывно измеряют угол сдвига между током и напряжением в фазе, сравнивают его с заданным значением и по достижении полученной разницей нулевого значения подают сигнал на полное закрытие вентилей преобразователя.
