Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов.
Цель изобретения - снижение энергозатрат.
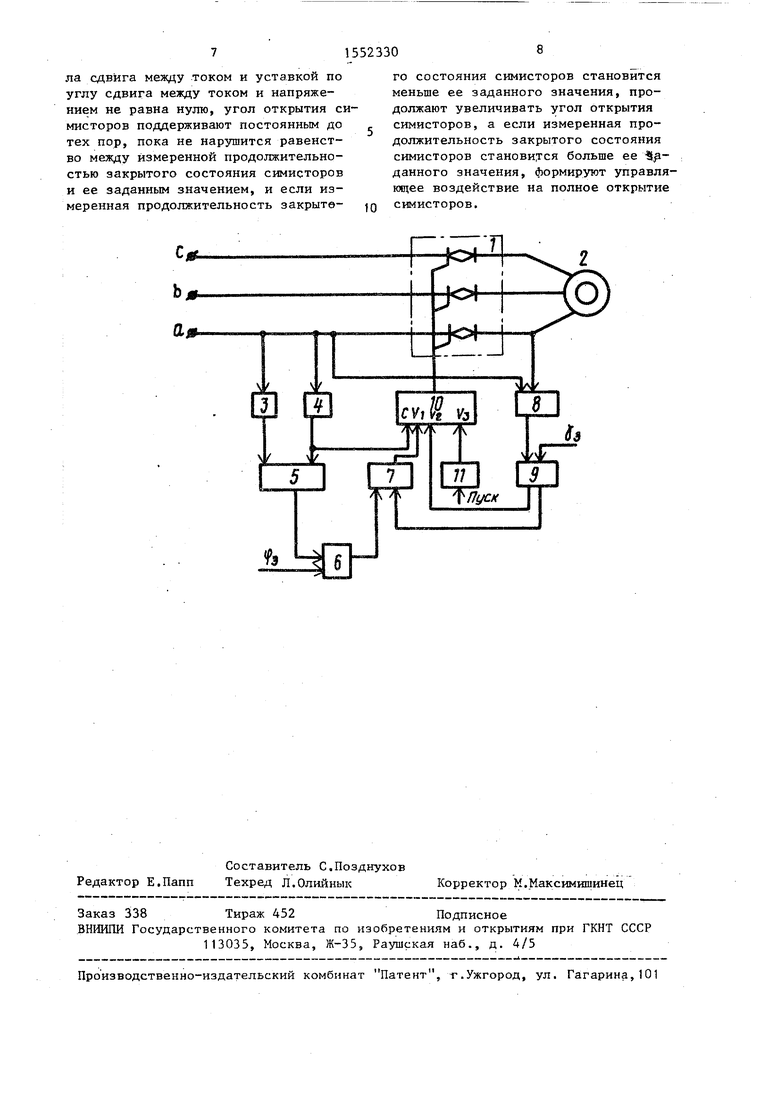
На чертеже показана структурная схема устройства, реализующего способ управления асинхронным электродвигателем.
Устройство для реализации способа управления асинхронным электродвигателем содержит силовой симис- торный коммутатор 1, выходы которого.
соединены с зажимами для подключения статорной обмотки электродвигателя 2, датчики 3 и 4 моментов перехода через нуль фазных тока и напряжения, датчик 5 угла сдвига, первый элемент 6 сравнения, логический элемент ИЛИ , 7, датчик 8 состояния симисторов, второй элемент 9 сравнения, систему 10 импульсно-фазового управления и
блок 11 пуска.
Входы симисторного коммутатора 1 предназначены для подключения к зажимам питающей сети. Датчик 3 момента перехода через нуль тока включен
ел
СД Ю
со со
в одну из фаз питания электродвигателя 2. К зажиму питающей сети этой же фазы подключен вход датчика 4 момента перехода нуль фазного напряжения . Выходы датчиков 3 и 4 моментов перехода через нуль фазных тока и напряжения соединены с соответствующими входами датчика,5 угла
523304
го элемента 6 Первый элемент 6 сравнения вырабатывает на выходе сигнал логической 1 в случае выполнения равенства и сигнал логического О в прртивном случае. Датчик 8 состояния симисторов определяет текущее значение продолжительности запертого состояния симистора. На первом
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки и устройство для его осуществления | 1986 |
|
SU1476589A1 |
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки | 1987 |
|
SU1555795A1 |
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки | 1987 |
|
SU1601726A2 |
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки | 1988 |
|
SU1629955A1 |
| СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА | 1990 |
|
RU2007834C1 |
| СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА | 1992 |
|
RU2035121C1 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ ЭЛЕКТРОДУГОВОЙ СВАРКИ | 2004 |
|
RU2275995C2 |
| Способ регулирования частоты вращения электродвигателя переменного тока | 1987 |
|
SU1471277A1 |
| Устройство для управления трехфазным асинхронным двигателем | 1978 |
|
SU919035A1 |
| Способ управления преобразователем частоты с непосредственной связью в режиме источника тока | 1972 |
|
SU1175011A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов. Цель изобретения - снижение энергозатрат. Управление напряжением питания асинхронного двигателя осуществляется по разнице между углом сдвига между током и напряжением и его заданным значением. Использование дополнительно управления по времени закрытого состояния симисторов на каждом полупериоде частоты напряжения питания исключает возможность опрокидывания двигателя и позволяет получить высокие значения энергетических показателей при любом существенном изменении нагрузки. 1 ил.
сдвига, выход которого соединен с од- JQ выходе второго элемента 9 сравнения ним входом первого элемента 6 срав- формируется сигнал логической 1 в нения
I, второй вход которого предназначен для подачи сигнала задания if,, угла сдвига между током и напряжением. Первый вход датчика 8 состояния симисторов соединен с выходом датчика 4 момента перехода через нуль фазного тока, а второй вход датчика 8 состояния симисторов соединен с зажимом указанной одной фазы статорной обмотки электродвигателя 2.
Выход датчика 8 состояния симисторов соединен с первым входом второго элемента 9 сравнения, второй
случае выполнения условия jf; y3 и сигнал логического О в противном случае, а на втором выходе формиру15 ется сигнал логической 1 в случае - ,и сигнал логического О в сл чае у; Х}. Система 10 импульсно-фа- зового управления (СИФУ) по импульсам синхронизации, поступающим на
20 вход синронизации С, формирует импульсы управления симисторами в соответствии с требуемым углом управл ния оС, причем, если имеется сигнал логической 1 на третьем управлявход которого предназначен для подачи 25 ющем входе V, то сигналы на первом сигнала jf задания продолжительности и втором управляющих входах V и V2 запертого состояния симисторов. Первый выход второго элемента 9 сравнения соединен с одним входом логического элемента ИЛИ 7, другой вход JQ которого соединен с выходом первого элемента 6 сравнения. Вход синхрони- взации, первый, второй и третий управляющие входы системы 10 импульсно- фазового управления соединены соот- первом управляющем входе V, незави- ветственно с выходом датчика перехода симо от сигнала на втором управляющем через нуль фазного напряжения, с выходом логического элемента ИЛИ 7, с вторым выходом второго элемента 9 сравнения и с выходом блока 11 пуска. 40 Выходы системы 10 импульсно-фазовоигнорируются, а угол oi плавно уменьшается от некоторого максимального значенияoi макс до нуля, т.е. напряжение на двигателе повышается от нулевого до номинального значения. Если же сигнал на третьем управляющем входе V СИФУ равен логическому О, то при сигнале логической 1 на
входе V, угол oi остается постоянным и равным предыдущему значению, т.е. . При сигнале логического О на первом управляющем входе V и при сигнале логической 1 на втором входе VQ угол oi регулируется по закону
го управления соединены с управляющими цепями симисторов силового коммутатора 1.
Устройство, реализующее способ 45 гДе Д° некоторое постоянное привходе V, угол oi остается постоянным и равным предыдущему значению, т.е . При сигнале логического О на первом управляющем входе V и п сигнале логической 1 на втором вх де VQ угол oi регулируется по закону
; .,+ Aot,(1)
управления электродвигателем, работает следующим образом.
Датчик 3 момента перехода тока через нуль вырабатывает импульс каждый раз, когда ток в фазе достигает нулевого значения. Датчик 4 момента перехода напряжения через нуль вырабатывает импульс каждый раз, когда напряжение фазы переходит через нулевое значение. Датчик 5 угла сдвига по сигналам датчиков 3 и 4 вырабатывает текущее значение cf; угла сдвига фаз между током и напряжением, которое поступает на первый вход первовыходе второго элемента 9 сравнения формируется сигнал логической 1 в
случае выполнения условия jf; y3 и сигнал логического О в противном случае, а на втором выходе формируется сигнал логической 1 в случае - ,и сигнал логического О в случае у; Х}. Система 10 импульсно-фа- зового управления (СИФУ) по импульсам синхронизации, поступающим на
вход синронизации С, формирует импульсы управления симисторами в соответствии с требуемым углом управления оС, причем, если имеется сигнал логической 1 на третьем управляющем входе V, то сигналы на первом и втором управляющих входах V и V2 первом управляющем входе V, незави- симо от сигнала на втором управляюще
игнорируются, а угол oi плавно уменьшается от некоторого максимального значенияoi макс до нуля, т.е. напряжение на двигателе повышается от нулевого до номинального значения. Если же сигнал на третьем управляющем входе V СИФУ равен логическому О, то при сигнале логической 1 на
ющем входе V, то сигналы на первом и втором управляющих входах V и V2 первом управляющем входе V, незави- симо от сигнала на втором управляющем
входе V, угол oi остается постоянным и равным предыдущему значению, т.е. . При сигнале логического О на первом управляющем входе V и при сигнале логической 1 на втором входе VQ угол oi регулируется по закону
; .,+ Aot,(1)
ращение угла.
При сигналах логического О на первом, втором и третьем входах V, , V4,.V} СИФУ 10, на его выходах формируется сигнал на полное открытие симисторов, T.e.. При включении питания блок 11 пуска формирует сигнал логической 1 на третьем управляющем входе Va системы 10 импульсно-фазового управления и, следовательно, угол управления начинает плавно уменьшаться от некоторого максимального значения, напряжение на двигателе 2 начинает возрастать,
5-
двигатель запускается. Через некоторое время, определяемое внутренними свойствами блока 11 пуска, сигнал на третьем входе V3 СИФУ 10 становится равным логич .скому О.
Допустим, что в, этот момент двигатель 2 работает на холостом ходу. Тогда У If, и так какоЈ 0, то время закрытого состояния симисторов На выходе первого элемента 6 сравнения сигнал логического О, и на первом выходе второго элемента 9 сравнения сигнал логического О, поэтому на выходе логического элемента ИЛИ 7 также сигнал логического О, т.е. на первом управляющем входе V, СИФУ 10 также сигнал логического О. Так как двигатель работает на холостом ходу и , то fi; 0, т.е. выполняется условие У; г, и на втором выходе второго элемента 9 сравнения сигнал логической 1, т.е. имеется сигнал логической 1 на втором управляющем входе V СИФУ 10. Поэтому угол управления tL увеличивается по закону (1). При этом угол сдвига между током и напряжением уменьшается, и вместе с тем появляется и начинает расти угол запертого состояния симисторов у. В зависимости от выбранных уставок ср5 и f процесс придет к тому, что одна из величин Cf или у станет равной заданной, а следовательно, либо на выходе первого элемента 6 сравнения, либо на перврм выходе второго элемента 9 сравнения появится сигнал логической 1, который через логический элемент ИЛИ 7 поступит на первый управляющий вход V СИФУ 10, при этом угол oi перестанет изменяться, а останется равным текущему значению, т.е. напряжение на двигателе остается постоянным до тех пор, пока не изменится нагрузка на валу двигателя. Если теперь к двигателю 2 будет приложена нагрузка, то изменится режим работы двигателя, а следовательно, изменится условие, приведшее к стабилизации угла управления cl, т.е. либо Cf; перестанет быть равным , либо у; перестанет быть равным у} и закон регулирования будет определяться сигналом на втором выходе второго элемента 9 сравнения. При этом если у; fat т.е.. нагрузка меньше допустимой, , угол управления будет возрастать, так как на
523306
втором входе V4 СИФУ 10 формируется логическая 1 и напряжение на двигателе будет уменьшаться до тех пор, пока не выполнится одно из условий Lp; Cf, или J J}. Если же нагрузка возрастает при выполнении условия то У станет больше, чем на втором управляющем входе V2 СИФУ
10 Ю формируется уровень логического О, СИФУ 10 формирует угол управления ,- т.е. к двигателю прикладывается номинальное напряжение и далее процесс регулирования повторяет15 ся.
Таким образом, введение управления по продолжительности симисторов и осуществление регулирования при любом существенном изменении на0 грузки с номинального напряжения позволяет получить высокие значения энергетических показателей на всем диапазоне изменения нагрузки и исключить возможность опрокидывания
25 двигателя.
Формула изобретения
Способ управления асинхронным
0 электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки, при котором фиксируют момент перехода через нуль тока и напряжения, определяют угол сдвига меж- 5 ду током и напряжением, сравнивают его с уставкой по углу сдвига между током и напряжением и при их положительной разности увеличивают угол открытия симисторов до тех пор, по0 ка разница между текущим значением угла и его уставкой по углу сдвига между током и напряжением не станет равной нулю, после чего угол открытия симисторов поддерживают равным
Ј текущему значению, отличающийся тем, что, с целью снижения энергозатрат, одновременно со сравнением угла сдвига между током и напряжением с уставкой по углу
0 сдвига между током и напряжением контролируют состояние симисторов, на каждом полупериоде частоты напряжения питания измеряют продолжительность закрытого состояния симисторов,
5 сравнивают ее с заданным значением и, если измеренная продолжительность закрытого состояния симисторов равна заданному значению, а указанная разница между текущим значением угла сдвига между током и уставкой по углу сдвига между током и напряжением не равна нулю, угол открытия си- мисторов поддерживают постоянным до тех пор, пока не нарушится равенство между измеренной продолжительностью закрытого состояния симисторов и ее заданным значением, и если измеренная продолжительность закрытас.
ft
го состояния симисторов становится меньше ее заданного значения, продолжают увеличивать угол открытия симисторов, а если измеренная продолжительность закрытого состояния симисторов становится больше ее Заданного значения, формируют управляющее воздействие на полное открытие симисторов.
нет
CVi
JU
г
/
ЪПуск |
| Сарбатов Р.С., Безаев В.Г | |||
| Опыт эксплуатации регулятора, минимизирующего потери в асинхронном двигателе | |||
| - Электротехническая промышленность, сер | |||
| Электропривод, 1981, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Патент США К 4052648, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
