Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов.
Целью изобретения является снижение энергозатрат.
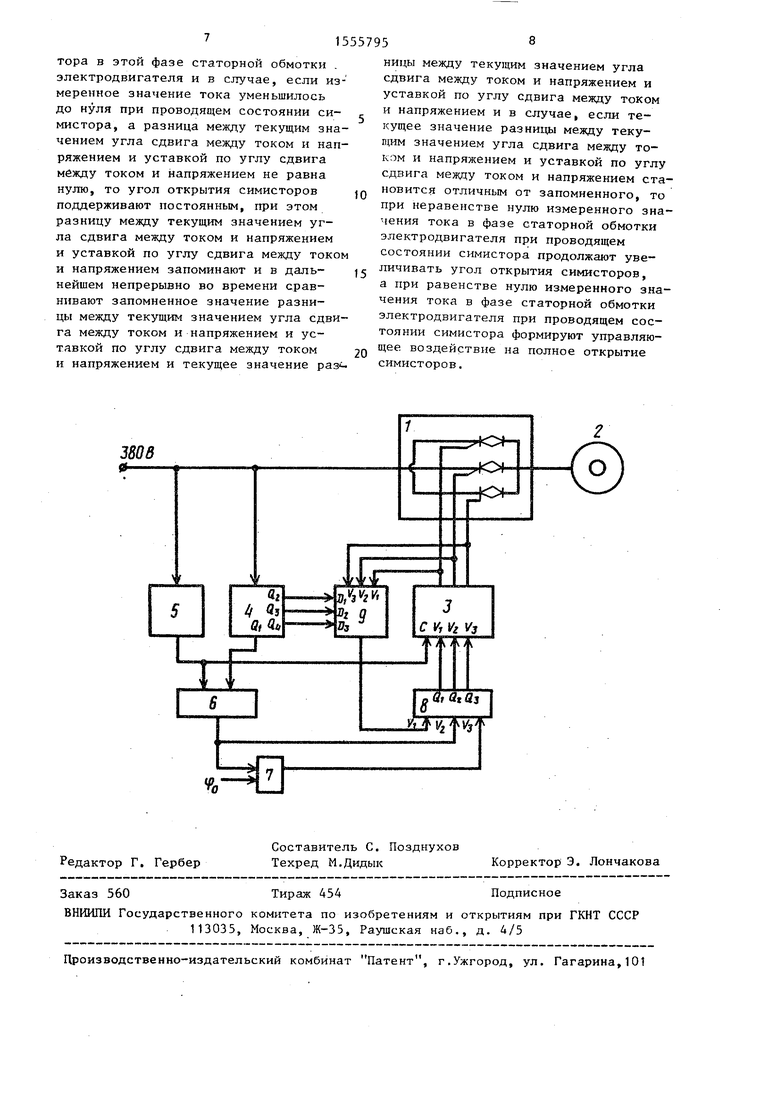
На чертеже приведена структурная схема устройства, реализующего способ
управления асинхронным электродвигателем.
Устройство для реализации способа управления асинхронным электродвигателем содержит симисторный силовой коммутатор 1, выходы которого соединены с зажимами статорной обмотки электродвигателя 2, а цепи управле
ния симисторов коммутатора 1 соединены с выходами фазосдвигающего элемента 3. Силовые входы симисторного коммутатора через датчик 4 тока соединены с зажимами для подключения к питающей сети. Устройство содержит также датчик 5 напряжения, измеритель 6 угла сдвига, элемент 7 сравнения, логический элемент 8, блок 9 коммутации. Датчик 5 напряжения входом соединен с одним из зажимов питающей сети, а выходом подключен к входу синхронизации фазосдвигающего элемента 3 и к первому входу измерителя 6 угла сдвига, второй вход которого соединен с первым выходом датчика 4 тока, третий, четвертый и пятый выходы которого соединены соответственно с первым, вторым и третьим информационным входами блока 9 коммутации, выход которого соединен с пер- вым входом логического элемента 8, второй и третий входы которого соединены соответственно с объединенными выходом измерителя 6 угла сдвига и первым входом элемента 7 сравнения и выходом элемента 7 сравнения. Первый, второй и третий выходы логического элемента 8 соединены соответственно с первым, вторым и третьим входами управления фазосдвигающего элемента 3, выходы которого соединены с управляющими входами блока 9 коммутации.
На первом выходе Q 1 датчика 4 тока формируются короткие импульсы в момент перехода через нуль тока в той фазе, к которой подключен датчик 5 напряжения. На втором QQ, третьем Q$ и четвертом Q$ выходах датчика 4 тока формируется логический сигнал 1 или О в зависимости от значения тока в фазах. При этом сигналы на выходах QQ, 0 и QA Формируются по следующим зависимостям:
«I
и.,
14
1 при | ia О О при iq О
1 при
О при ij О
1 при |ij О
О при ic 0.
На второй вход элемента 7 сравнения подают сигнал уставки и на его выходе формируется сигнал ло tf;
гического О при условии
и сигнал логической t при условии
5
0
5
0
, сигнал с выхода измерителя 6 угла сдвига, т.е. текущее значение угла сдвига между током и напряжением. Фазосдвигающий элемент 3 по импульсам синхронизации и сигналам на управляющих входах V формирует импульсы управления симисторами коммутатора 1 в заданные моменты времени, причем угол управления d сими- стором,подключенным к фазе А отсчитывается от импульса синхронизации, угол управления симистором, включенным в фазу С, равен tfc с + ., а угол управления симистором, включенным в фазу В, равен о1 о/л + + 120°эл. Фазосдвигающий элемент 3 изменяет угол управления u/д от нулевого значения до при управляющих сигналах V, О, V 0, Уд 0. При V 0; V2 1; V, 0 угол управления остается постоянным и равным предыдущему значению. При V, 0; Vet 0; Vj 1 угол управления ь/А равен нулю.
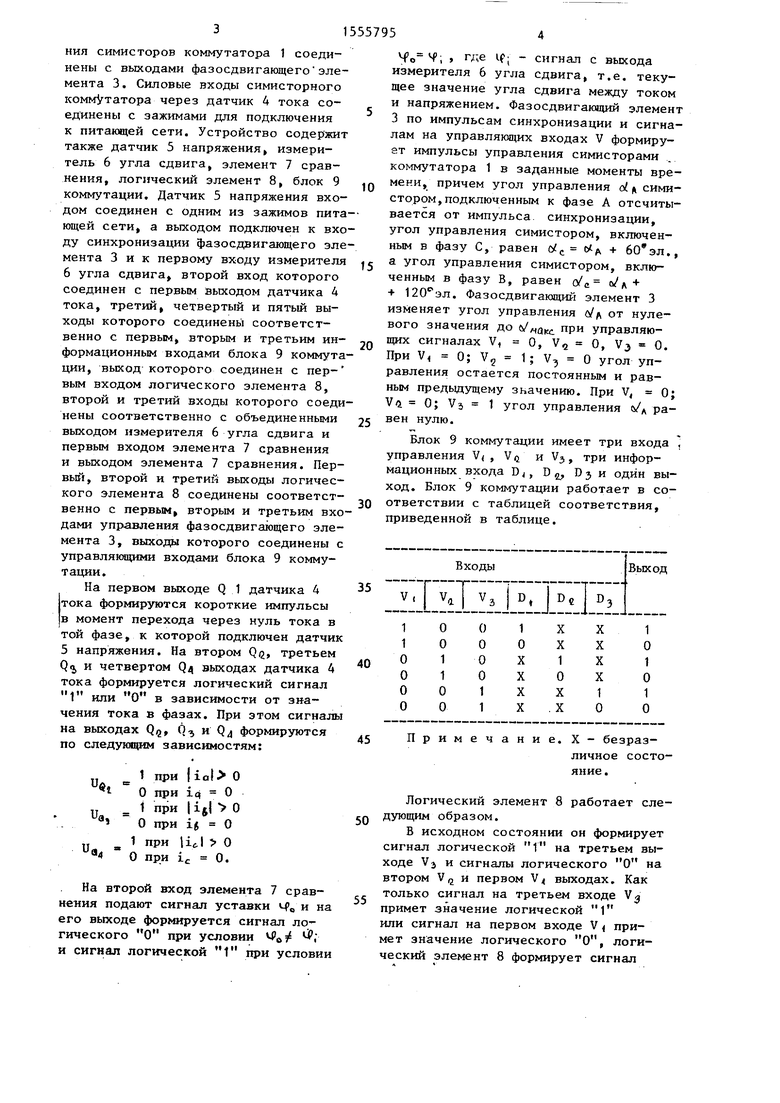
Блок 9 коммутации имеет три входа , управления V , и Vj, три информационных входа Dj, D 2, БЗ и один выход. Блок 9 коммутации работает в соответствии с таблицей соответствия, приведенной в таблице.
П р и м е ч а
н и е. X - безразличное состояние .
Логический элемент 8 работает следующим обра з ом.
В исходном состоянии он формирует сигнал логической 1 на третьем выходе Vj и сигналы логического О на втором VQ и первом V выходах. Как только сигнал на третьем входе V примет значение логической 1 или сигнал на первом входе V примет значение логического О, логический элемент 8 формирует сигнал
логической 11
на выходе Q& и сигнал логического О на выходах Q (и Q При этом логический элемент 8 запоминает текущее значение Ч3 и далее „ все время сравнивает текущее значени с запомненным. Как только текущее значение станет неравным запомненному, логический элемент 8 формирует кратковременно (порядка 10-30 млс) сигнал логической 1 на выходе QJ и сигнал логического О на выходах Рд и Q Ј. По окончании выдержки логический элемент 8 формирует сигнал
Второй случай: угол еще не стал равным -fo, а ток в одной из проводящих фаз стал равным нулю. Например, в процессе изменения углаоС, в
логической 1 на выходе Q и сигнал 15 данный момент времени, подали открыло гического О на выходах 0„ и 0. вающий импульс на симистор фаз В.
При этом на выходе блока 9 коммутации будет сигнал, соответствующий наличию или отсутствию тока фазы В. 20 Если ток в фазе В в какой-то момент станет равным нулю, логический элемент 8 формирует сигнал логической 1 на выходе Q и запоминает текущее значение Ц1. Фазосдвигающий элемент 3, 25 в соответствии с сигналом логическона выходах Q и Q.J.
Устройство, реализующее способ управления электродвигателя, работает следующим образом.
Пусть электродвигатель вращается, на выходе Q, логического элемента 8 формируется сигнал логической 1, в соответствии с чем фазосдвигающий элемент 3 постепенно увеличивает угол оЈ. управления симисторами коммутатора 1 и напряжение на двигателе 2 постепенно уменьшается. При этом уменьшается и угол сдвига между током и напряжением. Далее возможно два случая.
Первый случай: угол М стал равным D. При этом на выходе элемента 7 сравнения формируется сигнал логической 1, в соответствии с которым логический элемент 8 формирует сигнал логической 1 на выходе Q g и запоминает текущее значение Ц7-. Так как на выходе 0 логического элемента 8, соединенного с входом VQ фазосдвигающего элемента 3, формируется сигнал логической 1 элемент 3 сохраняет угол отпирания симисторами постоянным, равным предыдущему значению и, следовательно, напряжение на двигателе 2 не изменяется. При постоянной нагрузке не будет изменяться угол L, т.е. он будет равным запомненному значению, а следовательно, сигнал на выходе QJJ логического элемента 8 поддерживается равным логической 1. Таким образом, система остается в . этом состоянии до момента изменения нагрузки. Как только нагрузка на двигатель изменится, изменится значение угла if, оно перестанет быть равным запомненному и, следовательно, логический элемент 8 формирует сигнал логической 1 на выходе Оз в со
35
го элемента 8, поддерживает угол оЈ управления симисторами постоянным и равным предыдущему значению. Далее процесс идет также, как и в первом 30 случае.
Таким образом, способ управления позволяет обеспечить детерминированное регулирование двигателя при изменении нагрузки и исключить потери энергии при регулировании в случае уменьшения момента сопротивления.
Формула изобретения Способ управления асинхронным 4Q электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки, при котором фиксируют момент перехода через нуль тока и напряжения, определяют угол сдвига между то45 ком и напряжением, сравнивают его с уставкой по углу сдвига между током и напряжением и при их положительной разности увеличивают угол открытия симисторов до тех пор, пока разни50 ца между текущим значением угла и
его уставкой по углу сдвига между током и напряжением не станет равной нулю, угол открытия симисторов поддерживают равным текущему значению,
55 отличающийся тем, что, с целью снижения энергозатрат, дополнительно измеряют ток в одной из фаз статорной обмотки электродвигателя, контролируют состояние симис1555793
ответствии с чем фазосдвигающий элемент 3 сформирует угол управления симисторами, равный нулю и на двигатель 2 подается полное напряжение питания. Через выдержку времени сигнал на выхода Q 4 логического элемента 8 станет равным нулю, а сигнал на выходе Q( - логической 1, и процесс начнется сначала.
Второй случай: угол еще не стал равным -fo, а ток в одной из проводящих фаз стал равным нулю. Например, в процессе изменения углаоС, в
го элемента 8, поддерживает угол оЈ управления симисторами постоянным и равным предыдущему значению. Далее процесс идет также, как и в первом случае.
Таким образом, способ управления позволяет обеспечить детерминированное регулирование двигателя при изменении нагрузки и исключить потери энергии при регулировании в случае уменьшения момента сопротивления.
Формула изобретения Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки, при котором фиксируют момент перехода через нуль тока и напряжения, определяют угол сдвига между током и напряжением, сравнивают его с уставкой по углу сдвига между током и напряжением и при их положительной разности увеличивают угол открытия симисторов до тех пор, пока разница между текущим значением угла и
его уставкой по углу сдвига между током и напряжением не станет равной нулю, угол открытия симисторов поддерживают равным текущему значению,
отличающийся тем, что, с целью снижения энергозатрат, дополнительно измеряют ток в одной из фаз статорной обмотки электродвигателя, контролируют состояние симистора в этой фазе статорной обмотки . электродвигателя и в случае, если из- меренное значение тока уменьшилось до нуля при проводящем состоянии си- мистора, а разница между текущим значением угла сдвига между током и напряжением и уставкой по углу сдвига между током и напряжением не равна нулю, то угол открытия симисторов поддерживают постоянным, при этом разницу между текущим значением угла сдвига между током и напряжением и уставкой по углу сдвига между током и напряжением запоминают и в даль- нейшем непрерывно во времени сравнивают запомненное значение разницы между текущим значением угла сдвига между током и напряжением и уставкой по углу сдвига между током и напряжением и текущее значение раз.
ницы между текущим значением угла сдвига между током и напряжением и уставкой по углу сдвига между током и напряжением и в случае, если текущее значение разницы между текущим значением угла сдвига между током и напряжением и уставкой по углу сдвига между током и напряжением становится отличным от запомненного, то при неравенстве нулю измеренного значения тока в фазе статорной обмотки электродвигателя при проводящем состоянии симистора продолжают увеличивать угол открытия симисторов, а при равенстве нулю измеренного значения тока в фазе статорной обмотки электродвигателя при проводящем состоянии симистора формируют управляющее, воздействие на полное открытие симисторов.
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов. Цель изобретения - снижение энергозатрат. При управлении двигателем определяют угол сдвига между током и напряжением, сравнивают его с уставкой и регулируют угол открытия симисторов силового коммутатора до тех пор, пока угол сдвига не станет равным заданному. При достижении равенства угол открытия симисторов поддерживают постоянным. Дополнительно измеряют ток в одной из фаз статорной обмотки двигателя. Если значение тока при проводящем состоянии симистора в этой фазе равно нулю, а угол сдвига между током и напряжением не равен уставке, угол открытия симисторов также поддерживают постоянным, запоминают значение разницы между заданным и текущим углами сдвига между током и напряжением и непрерывно во времени измеряют текущее значение разницы указанных углов. Если она становится отличной от запомненной , при неравенстве нулю тока в фазе двигателя продолжают увеличивать угол открытия симисторов, а если ток в фазе равен нулю, полностью открывают симисторы. Таким образом производят детермированное регулирование двигателя при изменении нагрузки и исключают потери при регулировании в случае уменьшения момента сопротивления. 1 ил.
©
| Сарбатов Р.С., Безаев В.Г | |||
| Опыт эксплуатации регулятора, минимизирующего потери в асинхронном двигателе | |||
| - Электротехническая промышленность, Электропривод, вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Патент США № 4052648, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
