Изобретение относится к электротехнике, в частности к приводу с вентильным управлением, и может быть использовано для интенсивного торможения двигателя.
Известен способ динамического торможения асинхронного двигателя. Двигатель запитывается от сети через управляемые тиристоры. При торможении тиристоры в одной из фаз двигателя полностью закрыты, а в двух других пропускают ток только в одном направлении. В результате в спектре периодического несинусоидального напряжения, приложенного к двигателю, помимо постоянной составляющей присутствует еще и субгармоническая составляющая сетевого напряжения, вследствие чего формируется результирующая механическая характеристика двигателя, имеющая сколько-нибудь заметный тормозной момент в зоне высоких скоростей [1] Недостатком данного способа является малая эффективность тормозного воздействия, особенно при снижении скорости вращения ротора.
Наиболее близким по технической сущности является способ торможения двигателя противовключением, заключающийся в переключении на ходу двух фаз обмотки статора, что ведет к перемене направления вращения магнитного поля [2] Ротор при этом вращается против направления движения поля и постепенно замедляется. При снижении угловой скорости ротора до нулевого значения двигатель отключается от сети для исключения возможности его разгона в противоположном направлении.
Основным достоинством этого способа торможения является очень малое время останова двигателя, т.к. в этом случае двигатель начинает работать в режиме электромагнитного тормоза. Недостатком данного способа торможения является наличие значительных механических и тепловых усилий, которые могут привести к выводу из строя оборудования, а также необходимость наличия механического датчика на роторе для фиксирования момента перехода угловой скорости двигателя через нуль.
Задача данного изобретения создание способа торможения асинхронного двигателя с вентильным преобразователем в цепи статора, при котором при подаче сигнала на останов двигателя переключают две фазы обмотки статора и одновременно с переключением двух фаз обмотки статора уменьшают амплитуду и устанавливают фиксированную частоту питающего напряжения таким образом, чтобы выполнялось условие U/f-Kз, затем непрерывно сравнивают значение тока в статорной обмотке с заданным значением и при отрицательном знаке результата сравнения изменяют угол управления вентилей преобразователя до тех пор, пока результат сравнения не достигнет нулевого значения, и одновременно непрерывно измеряют угол сдвига между током и напряжением в фазе и сравнивают его с заданным значением и, при достижении полученной разницей нулевого значения подают сигнал на полное закрытие вентилей преобразователя, где U величина напряжения на выходе преобразователя; f частота напряжения на выходе преобразователя; Кз расчетная величина, пропорциональная магнитному потоку в момент переключения обмоток двигателя.
Заявленное техническое решение отличается от прототипа тем, что одновременно с переключением фаз статора дополнительно уменьшают амплитуду и устанавливают фиксированную частоту питающего напряжения таким образом, чтобы выполнялось условие U/f=Kз, где Кз расчетная величина, пропорциональная магнитному потоку в момент переключения обмоток двигателя, затем непрерывно сравнивают значение тока в статорной обмотке с заданным значением и при отрицательном знаке результата сравнения изменяют угол управления вентилей преобразователя до тех пор, пока результат сравнения не достигнет нулевого значения, и одновременно непрерывно измеряют угол сдвига между током и напряжением в фазе и сравнивают его с заданным значением и при достижении полученной разницей нулевого значения подают сигнал на полное закрытие вентилей преобразователя.
Технический результат выражается в резком снижении механических и тепловых усилий на двигатель за счет изменения тормозного момента и более точном определении момента отключения двигателя от сети.
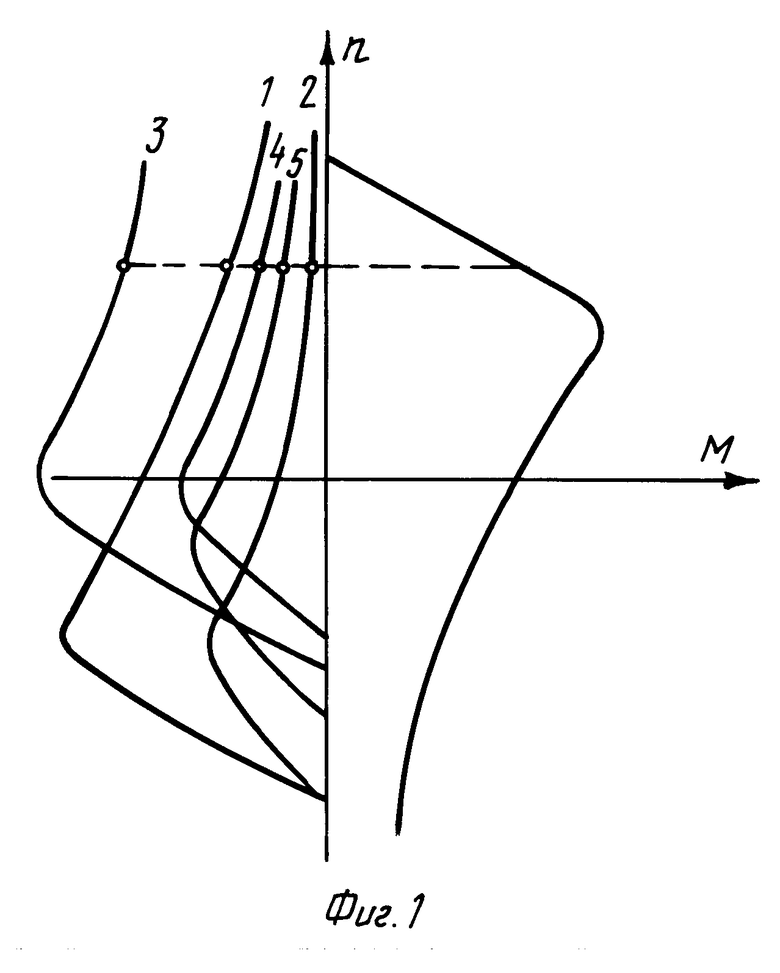
Предлагаемый способ торможения можно пояснить с помощью фиг. 1, где кривая 1 естественная механическая характеристика двигателя при номинальных значениях напряжения и частоты; кривая 2 механическая характеристика двигателя при сниженном напряжении на двигателе; кривая 3 при уменьшении частоты; кривая 4 и 5 при одновременном наименовании напряжения и частоты на двигателе, но при разных Кз (U/f const).
Как видно из фиг. 1, одновременным изменением частоты и напряжения можно, изменяя Кз, подобрать требуемый режим торможения для любого вида привода. При этом погрешность при определении момента отключения двигателя от сети снижается, т.к. наклон кривой механической характеристики имеет более выраженный характер.
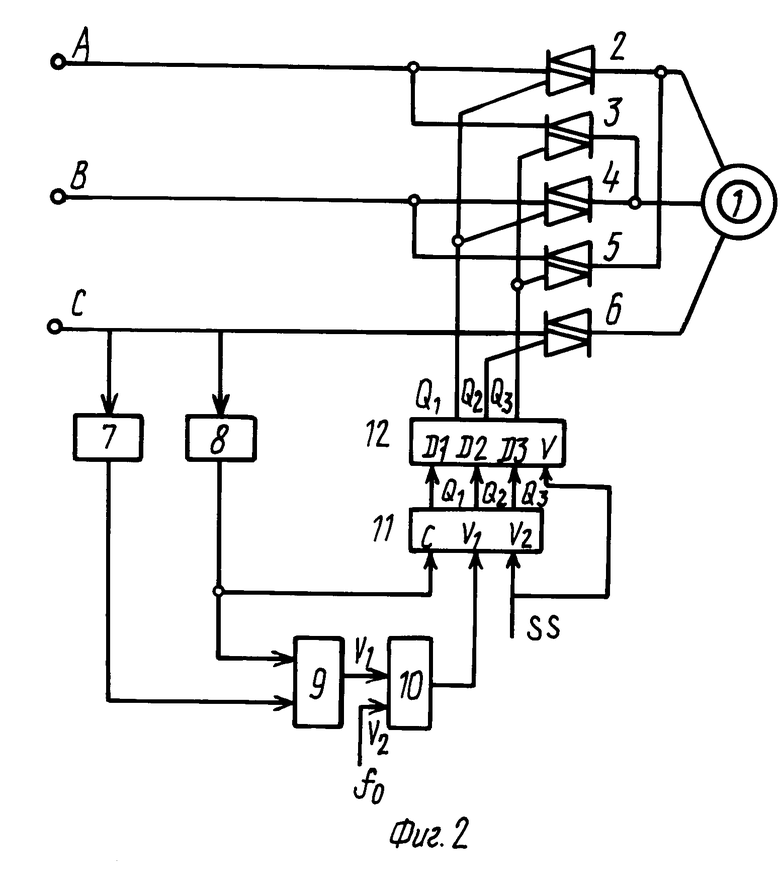
Предлагаемый способ может быть реализован с помощью устройства, схема которого изображена на фиг. 2. В цепи статора управляемого асинхронного двигателя 1 включен вентильный преобразователь с симисторами 2 6. Устройство для управления торможением содержит датчик тока 7, датчик 8 напряжения, датчик 9 угла сдвига фаз тока и напряжения, блок 10 сравнения, фазосдвигающий блок 11 и блок пересчета 12. Симисторы 2, 3 первым силовым выводом подключены к фазе А силовой питающей сети, симисторы 4, 5 первым силовым выводом подключены к фазе В силовой питающей сети, симистор 6 первым силовым выводом подключены к первой фазе статорной обмотки асинхронного двигателя 1, симисторы 3, 4 вторым силовым выводом подключены к второй фазе статорной обмотки асинхронного двигателя 1, второй вывод симистора 6 подключен к 3-й фазе статорной обмотки асинхронного двигателя, вход датчика 7 подключен к фазе С силовой питающей сети, а выход к второму входу датчика 9 угла сдвига фаз, вход датчика 8 напряжения подключен к фазе С силовой питающей сети, а выход к первому входу датчика 9 угла сдвига фаз и входу С фазосдвигающего блока 11, выход датчика 9 подключен к первому входу блока 10 сравнения (U1), на второй вход которого (U2) подается сигнал уставки, а выход подключен на вход U1 фазосдвигающего блока 11. На вход U2 блока 11 подается сигнал пуска останова SS, выходы Q1, Q2, Q3 фазосдвигающего блока 11 подключены к входам D1, D2, D3 блока пересчета 12, причем выходы Q1, Q3 представляют собой каждый два канала управления симисторами 2, 4 и 3, 5 по раздельности. Выход Q1 блока пересчета 12 подключен к выводам управления симисторами 2, 4 выход Q2 к выводу управления симистором 6, а выход Q3 к выводам управления симисторами 3, 5 причем выходы Q1, Q3 представляют собой каждый два канала управления симисторами 2, 4 и 3, 5 по раздельности. На управляющий вход U блока пересчета 12 поступает сигнал пуска/останова SS.
Устройство работает следующим образом. Датчик тока 7 формирует импульс всякий раз, когда ток в фазе "С" достигает нулевого значения. Датчик 8 напряжения формирует импульс всякий раз, когда напряжение в фазе "С" достигает нулевого значения. Датчик 9 угла сдвига фаз по импульсам датчиков 7, 8 формирует на выходе сигнал, пропорциональный значению ϕт, причем при отсутствии импульсов с датчика 7 на выходе датчика 9 формируется сигнал нулевого уровня. Блок сравнения 10 формирует на выходе сигнал логической "1" при выполнении условия ϕт ≅ϕз и сигнал логического "0" при условии ϕт> ϕз, где ϕт сигнал на первом входе;
ϕз сигнал на втором входе блока 10.
Фазосдвигающий блок по импульсам синхронизации, поступающим на вход С, формирует импульсы управления симисторами 2 6, причем, при сигнале SS на входе U2, имеющем уровень логической "1" блок 11 формирует импульсы управления на выходах Q1, Q2 с углом управления симисторами α- 0 на каждом полупериоде сетевого напряжения. При сигнале SS на входе U2, имеющем уровень логического "0", блок 11 формирует импульсы управления симисторами на выходах Q1, Q3 с углом управления α- α0, отличным от нуля, т.е. на двигатель подается напряжение меньше номинального, уровень которого определяется углом управления α0.
При сигнале SS на входе U2, имеющем уровень логического "0", и сигнале на входе U1, имеющем уровень логической "1", на всех выходах Q1 Q3 блока 11 импульсы управления отсутствуют.
При сигнале на входе U пересчетного устройства, имеющем уровень логической "1" входы D связаны с выходами Q непосредственно, т.е. импульсы с выходов фазосдвигающего устройства 11 поступают на управляющие входы тиристоров через блок пересчета 12. При сигнале на входе U пересчетного устройства, имеющем уровень логического "0", пересчетное устройство делит частоту импульсов на выходе в К раз, т.е. частота импульсов на выходе fвых fвх/К, где fвх частота импульсов на входе;
К коэффициент пересчета фиг. 3.
Таким образом, частота подводимого к двигателю напряжения будет fc/K, где fc частота напряжения силовой питающей сети.
В исходном состоянии сигнал SS имеет нулевой уровень, импульсы управления симисторами отсутствуют, токов в фазах асинхронного двигателя нет, импульсы с выхода датчика 7 отсутствуют, с выхода датчика 9 на первый вход блока 10 поступает сигнал логического нуля и, следовательно, на вход 11 фазосдвигающего блока поступает сигнал логической "1". Устройство в целом находится в устойчивом состоянии. При изменении уровня сигнала SS на "1" начинают поступать импульсы управления симисторами 2, 4, 6 (выходы Q1, Q2) с углом управления α-0, к двигателю прикладывается полное напряжение сети, двигатель запускается. Для торможения двигателя на вход SS подается сигнал логического нуля, тогда как на входе U1 присутствует сигнал логического нуля, начинают работать симисторы 3, 5, 6 с углом управления α- α0. Так как на вход U пересчетного устройства идет сигнал логического нуля, то устройство 12 начинает формировать на выходе импульсы с частотой fc/K. Чередование фаз меняется на обратное и к двигателю прикладывается напряжение меньшей частоты, причем U/f-Kз. Двигатель начинает тормозиться и угол ϕт уменьшается. Когда угол ϕт станет равным установке ϕз, на выходе блока 10 возникает сигнал логической "1" и импульсы управления симисторами исчезнут. Симисторы закроются, напряжение на двигателе станет равным нулю.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА | 1990 |
|
RU2007834C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЧАСТОТЫ N-ФАЗНЫХ ЭЛЕКТРОАГРЕГАТОВ | 1995 |
|
RU2084077C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ ПУСКОМ И ТОРМОЖЕНИЕМ АСИНХРОНИЗИРОВАННОЙ МАШИНЫ | 2011 |
|
RU2466492C1 |
| СПОСОБ ЗАЩИТЫ ГЕНЕРАТОРА ОТ ЗАМЫКАНИЙ НА ЗЕМЛЮ В ОБМОТКЕ СТАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096885C1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| Способ управления асинхронным электродвигателем с симисторным силовым коммутатором в фазах статорной обмотки | 1987 |
|
SU1555795A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1429270A1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2014723C1 |
| Устройство для управления трехфазным асинхронным двигателем | 1978 |
|
SU919035A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЦИФРОВЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2013 |
|
RU2543970C1 |

Изобретение относится к электротехнике, в частности к приводам с вентильным управлением, и может быть использовано в электроприводах общепромышленного применения. Сущность изобретения заключается в повышении интенсивности торможения асинхронного двигателя и точности его останова за счет увеличения тормозного момента двигателя и угла сдвига между током и напряжением в фазе двигателя. Одновременно с переключением фаз статора и снижением напряжения устанавливают фиксированное пониженное значение частоты тока таким образом, чтобы выполнялось определенное соотношение, сравнивают значение тока в статорной обмотке с заданным значением и при отрицательном знаке результата сравнения увеличивают угол управления вентилями преобразователя до тех пор, пока результат сравнения не достигает нулевого значения. 3 ил.
СПОСОБ ТОРМОЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ В ЦЕПИ СТАТОРА, при котором при подаче сигнала на останов двигателя переключают две фазы обмотки статора, отличающийся тем, что одновременно с переключением двух фаз обмотки статора уменьшают амплитуду и устанавливают фиксированную частоту питающего напряжения такой, чтобы выполнялось условие U/f K, затем непрерывно сравнивают значение тока в статорной обмотке с заданным значением и при отрицательном знаке результата сравнения изменяют угол управления вентилей преобразователя до тех пор, пока результат сравнения не достигнет нулевого значения, и одновременно непрерывно измеряют угол сдвига между током и напряжением в фазе и сравнивают его с заданным значением и при достижении полученной разницей нулевого значения подают сигнал на полное закрытие вентилей преобразователя, где U величина напряжения на выходе преобразователя; f частота напряжения на выходе преобразователя; K - расчетная величина, пропорциональная магнитному потоку в момент переключения обмоток двигателя.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чиликин М.Г., Сандлер А.О | |||
| Общий курс электропривода | |||
| - М.: Энергоиздат, 1981, с.83. | |||
