Изобретение относится к электротехнике, а именно к многодвигательным электроприводам, и может найти применение в линейных приводах подач разнообразного технологического оборудования.
Наиболее близким по технической сущности к предлагаемому является двухдвигательный электропривод, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика положения, вторым входом к выходу второго датчика положения, а третьим входом к задатчику положения, регулятор скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом к выходу регулятора положения, а выходом к первому сумматору, регулятор рассогласования по положению, подключенный первым входом к выходу первого датчика положения, вторым входом через первый инвертор к выходу второго датчика положения, а третьим входом к задатчику рассогласования по положению, регулятор рассогласования по скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом через второй инвертор к выходу второго датчика скорости, а выходом к первому входу второго сумматора и через третий инвертор ко второму входу первого сумматора, третий вход регулятора скорости подключен к выходу второго датчика скорости, третий вход регулятора рассогласования по скорости подключен к выходу регулятора рассогласования по положению, второй вход второго сумматора подключен к выходу регулятора скорости. Кроме тока, первый регулятор тока подключен входом к выходу первого сумматора, а второй регулятор тока - к выходу второго сумматора.
Недостатком известного электропривода является невозможность добиться высоких динамических показателей при использовании двигателей с различными характеристиками.
Цель изобретения - расширение области применения.
Поставленная цель достигается тем, что в известный двухдвигательный электропривод, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика положения, вторым входом к выходу второго датчика положения, а третьим входом к задатчику положения, регулятор скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом к выходу регулятора положения, а выходом к первому сумматору, регулятор рассогласования по положению, подключенный первым входом к выходу первого датчика положения, вторым входом через первый инвертор к выходу второго датчика положения, а третьим входом к задатчику рассогласования по положению, регулятор рассогласования по скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом через второй инвертор к выходу второго датчика скорости, а выходом к первому входу второго сумматора и через третий инвертор ко второму входу первого сумматора, третий вход регулятора скорости подключен к выходу второго датчика скорости, третий вход регулятора рассогласования по скорости подключен к выходу регулятора рассогласования по положению, второй вход второго сумматора подключен к выходу регулятора скорости, в него дополнительно введены первое корректирующее звено, подключенное входом к выходу первого сумматора, а выходом к входу первого регулятора тока, и второе корректирующее звено, подключенное входом к выходу второго сумматора, а выходом к входу второго регулятора тока, при этом корректирующие звенья выполнены таким образом, чтобы соблюдалось равенство Wk1˙ WI1 ˙WD1 = WK2 ˙WI2 ˙WD2, где WK1, WK2, WI1, WI2, WD1, WD2 - передаточные функции первого и второго корректирующих звеньев, первого и второго регуляторов тока, первого и второго электродвигателей.
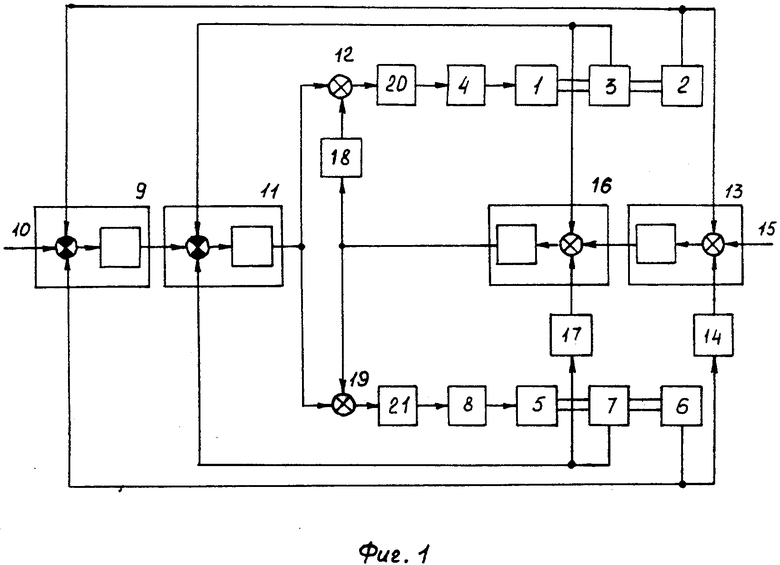
На фиг. 1 представлена функциональная схема двухдвигательного электропривода; на фиг. 2 и 3 - его структурные схемы.
Электропривод содержит первый управляемый двигатель 1 с установленными на его валу датчиком 2 положения и датчиком 3 скорости, подключенный к выходу регулятора 4 тока, второй управляемый двигатель 5 с установленными на его валу датчиком 6 положения и датчиком 7 скорости, подключенный к выходу регулятора 8 тока, регулятор 9 положения, подключенный первым входом к выходу датчика 2 положения, вторым входом к выходу датчика 6 положения, а третьим входом к задатчику 10 положения, регулятор 11 скорости, подключенный первым входом к выходу датчика 3 скорости, вторым входом к выходу регулятора 9 положения, третьим входом к выходу датчика 7 скорости, а выходом к первому входу сумматора 12, регулятор 13 рассогласования по положению, подключенный первым входом к выходу датчика 2 положения, вторым входом через инвертор 14 к выходу датчика 6 положения, а третьим входом к задатчику 15 рассогласования по положению, регулятор 16 рассогласования по скорости, подключенный первым входом к выходу датчика 3 скорости, вторым входом через инвертор 17 к выходу датчика 7 скорости, третьим входом к выходу регулятора 13 рассогласования по положению, а выходом через инвертор 18 к второму входу сумматора 12 и непосредственно к первому входу сумматора 19, второй вход которого подключен к выходу регулятора 11 скорости.
В электропривод введены корректирующие звенья 20 и 21, подключенные входами к выходам сумматоров 12 и 19, а выходами к входам регуляторов 4 и 8 тока соответственно.
Корректирующие звенья 20, 21 представляют собой в общем случае динамические звенья пассивного или активного типа. В простейшем случае корректирующим звеном может быть обычный усилитель.
Регулятор 9, 11, 13 или 16 может быть выполнен из последовательно соединенных трехвходового сумматора, входы которого являются входами регулятора, и преобразователя сигнала, выход которого является выходом регулятора. В качестве преобразователя сигнала могут быть использованы регуляторы, П-, ПИ - или ПИД-типа.
Электропривод работает следующим образом.
На управляющий вход регулятора 9 положения подается сигнал 2 S3, а на управляющий вход регулятора 13 рассогласования по положению - сигнал 2Δ S3, где S3 - задание положения, которое должны синхронно отрабатывать электродвигатели 1 и 5, ΔS3 - задание рассогласования по положению, которое должны поддерживать при движении электродвигатели 1 и 5.
С помощью датчиков 2 и 6, 3 и 7 измеряются текущие положения S1и S2, скорости перемещения v1 и v2 роторов электродвигателей 1 и 5.
Отработка заданий двухдвигательным электроприводом осуществляется за счет одновременного функционирования контура регулирования положения и контура синхронизации. С помощью первого контура работы двигателей 1 и 5 занимают положения S1 и S2, среднее значение которых равняется Sз, т. е. когда S1 + S2 = 2 Sз; С помощью второго контура роторы двигателей 1 и 5 занимают положения, удовлетворяющие равенству S2 - S1 = 2 ΔSз. За счет одновременного функционирования контуров роторы двигателей 1 и 5 занимают положения
S1 = Sз -Δ Sз, S2 = Sз + ΔSз.
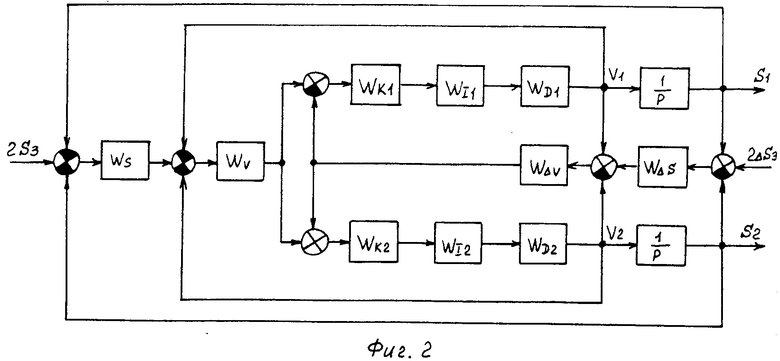
На фиг. 2 приведена структурная схема двухдвигательного электропривода, где WK1 и WK2, WI1 и WI2, WD1 и WD2 - передаточные функции корректирующих звеньев 20 и 21, регуляторов 4 и 8 тока, электродвигателей 1 и 5, WS, Wv, W ΔS, W Δv - передаточные функции преобразователей сигналов, входящих в регуляторы 9, 11, 13 и 16 соответственно.
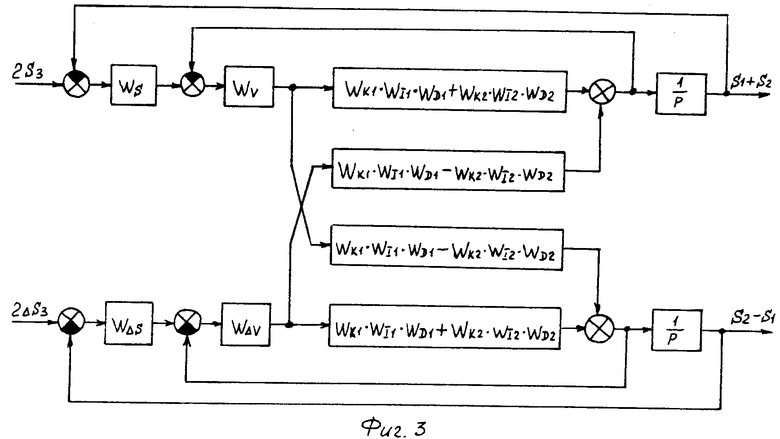
На фиг. 3 приведена преобразованная структурная схема двухдвигательного электропривода в виде взаимосвязанных контуров регулирования положения и синхронизации.
Из преобразованной структурной схемы следует, что при выполнении условия:
WK1 ˙ WI1˙ WD1 = WK2 ˙WI2˙WD2 (1) контуры регулирования положения и синхронизации становятся взаимно независимыми.
Независимость контуров регулирования позволяет с помощью соответствующего выбора передаточных функций WS и Wv , определяющих динамику контура регулирования положения, а затем с помощью выбора передаточных функций WΔS и WΔv, определяющих динамику контура синхронизации, добиться желаемых характеристик каждого контура регулирования в отдельности, тем самым обеспечить высокие динамические и статические характеристики двухдвигательного электропривода в целом.
Для иллюстрации рассмотрим двухдвигательный электропривод широкоформатного графопостроителя. Электропривод предназначен для перемещения портала, по которому, в свою очередь, перемещают пишущий узел. В качестве управляемых двигателей 1 и 5 используют линейные синхронные двигатели с частотно-токовым управлением.
С помощью регуляторов 4, 8 тока, реализующих частотно-токовое управление, обеспечивают управление силовой тяги линейных двигателей пропорционально входным сигналам регуляторов 4, 8 тока. В данном случае
WI1WD1 =  , WI2 ˙WD2 =
, WI2 ˙WD2 =  , (2) где К - коэффициент, определяющий соотношение между силой тяги линейного двигателя и входным сигналом регулятора тока, m1 и m2 - подвижные массы, перемещаемые электродвигателями 1 и 5.
, (2) где К - коэффициент, определяющий соотношение между силой тяги линейного двигателя и входным сигналом регулятора тока, m1 и m2 - подвижные массы, перемещаемые электродвигателями 1 и 5.
Согласно (1) и (2), корректирующими звеньями 20, 21 выбирают обычные усилители, например, с коэффициентами передачи К1 = 1, К2 = m2/m1.
Таким образом, введение в двухдвигательный электропривод корректирующих звеньев и соответствующий выбор их передаточных функций позволяет обеспечить взаимную независимость контура регулирования положения и контура синхронизации при использовании электродвигателей не только с близкими, но и с существенно различными динамическими характеристиками. (56) Авторское свидетельство СССР N 1705997, кл. Н 02 Р 7/68, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод | 1989 |
|
SU1705997A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046517C1 |
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130228C1 |
| ЭЛЕКТРОПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2101845C1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2584142C1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| РЕГУЛЯТОР УГЛА ПОДАЧИ ИМПУЛЬСОВ ТОКА В ФАЗНЫЕ ОБМОТКИ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2088040C1 |
Использование: может быть использовано в линейных приводах подач разнообразного технологического оборудования. Сущность: введение в двухдвигательный электропривод корректирующих звеньев и соответствующий выбор их передаточных функций позволяет обеспечить взаимную независимость контура регулирования положения и контура синхронизации при использовании электродвигателей с существенно различными динамическими характеристиками. 3 ил.
ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД, содержащий первый управляемый двигатель с установленными на его валу первым датчиком положения и первым датчиком скорости, подключенный к выходу первого регулятора тока, второй управляемый двигатель с установленными на его валу вторым датчиком положения и вторым датчиком скорости, подключенный к выходу второго регулятора тока, регулятор положения, подключенный первым входом к выходу первого датчика положения, вторым входом - к выходу второго датчика положения, а третьим входом - к задатчику положения, регулятор скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом к выходу регулятора положения, а выходом - к первому сумматору, регулятор рассогласования по положению, подключенный первым входом к выходу первого датчика положения, вторым входом через первый инвертор - к выходу второго датчика положения, а третьим входом - к задатчику рассогласования по положению, регулятор рассогласования по скорости, подключенный первым входом к выходу первого датчика скорости, вторым входом через второй инвертор - к выходу второго датчика скорости, а выходом - к первому входу второго сумматора и через третий инвертор - к второму входу первого сумматора, третий вход регулятора скорости подключен к выходу второго датчика скорости, третий вход регулятора рассогласования по скорости подключен к выходу регулятора рассогласования по положению, второй вход второго сумматора подключен к выходу регулятора скорости, отличающийся тем, что, с целью расширения области применения, в него дополнительно введены первое корректирующее звено, подключенное входом к выходу первого сумматора, а выходом - к входу первого регулятора тока, и второе корректирующее звено, подключенное входом к выходу второго сумматора, а выходом - к входу второго регулятора тока, при этом корректирующие звенья выполнены таким образом, чтобы соблюдалось равенство
WK1 · WI1 · WD1 = WK2 · WI2 · WD2,
где WK1, WK2, WI1, WI2, WD1, WD2 - передаточные функции первого и второго корректирующих звеньев, первого и второго регуляторов тока, первого и второго электродвигателей.
