Изобретение относится к электротехнике и может быть использовано в электроприводах широкого назначения, где требуется возвратно-поступательное движение рабочего тела механизма, в том числе для привода штанговых насосов.
Известен электропривод, содержащий электродвигатель, станцию управления, механический преобразователь вращательного движения в возвратно-поступательное, включающий противовес, клиноременную передачу, редуктор, кривошип, шатуны-балансиры [1].
В известном электроприводе не обеспечивается регулирование и оптимизация режимов работы электропривода и исполнительного механизма при изменении условий эксплуатации.
Техническим результатом заявляемого электропривода является устранение недостатков прототипа.
Предлагаемый электропривод отличается от известного тем, что механический преобразователь вращательного движения в поступательное включает дополнительный канатоведущий шкив, причем вращающаяся часть механического преобразователя соединена с валом электродвигателя, его линейно движущаяся часть через первый канат и первый канатоведущий шкив соединена со штоком исполнительного механизма, а через второй канат второй канатоведущий шкив соединена с противовесом. Станция управления дополнительно содержит датчик скорости, датчик тока, датчик положения, блок задания траектории движения и последовательно соединенные регулятор положения, регулятор скорости, регулятор тока и преобразователь, силовые выходы которого соединены с выводами электродвигателя, а входные выводы через пускатель соединены с сетью, вход-выход обратной связи регулятора тока через пускатель соединен с выходом датчика тока, вход обратной связи регулятора скорости соединен с выходом датчика скорости, выход датчика положения со входом датчика скорости и входом обратной связи регулятора положения, задающий вход которого соединен с выходом блока задания траектории движения, реализующим следующую функциональную зависимость:
Y=A•sin(w•t),
где Y - выходной сигнал блока задания траектории движения;
A - входной сигнал амплитуды перемещения;
w - входной сигнал задания частоты колебаний;
t - время.
Изобретательский уровень предлагаемого электропривода обусловлен возможностью регулирования режимов работы электропривода и исполнительного механизма путем оперативного изменения амплитуды и частоты колебаний штока исполнительного механизма, а также существенным упрощением механического преобразователя вращательного движения в возвратно-поступательное за счет исключения клиноременной передачи, редуктора, кривошипов, шатунов-балансиров и роторных противовесов.
Предполагаемое изобретение является промышленно применимым, т.к. оно может быть использовано в нефтепромысловом оборудовании при добыче нефти.
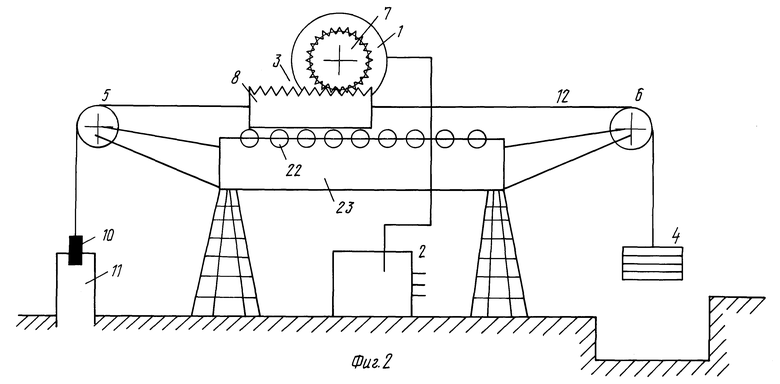
На фиг. 1 приведена схема электропривода. На фиг. 2 схема механизма преобразования вращательного движения в поступательное с использованием передачи шестерня - рейка.
Электропривод содержит электродвигатель 1, станцию 2 управления электроприводом, механический преобразователь 3 вращательного движения в поступательное.
Механический преобразователь 3 включает противовес 4, два канатоведущих шкива 5 и 6. Вращающаяся часть 7 механического преобразователя 3 непосредственно соединена с валом электродвигателя 1, линейно двигающаяся часть 8 механического преобразователя 3 вращательного движения в поступательное через первый канат 9 и первый канатоведущий шкив 5 соединена со штоком 10 исполнительного механизма 11, а через второй канат 12 и второй канатоведущий шкив 6 соединена с противовесом 4.
Станция управления 2 содержит датчик 13 положения, датчик 14 скорости, датчик 15 тока, блок 16 задания траектории движения и последовательно соединенные регулятор 17 положения, регулятор 18 скорости, регулятор 19 тока и преобразователь 20. Силовые выходы преобразователя 20 соединены с входами электродвигателя 1, а силовые входы через пускатель 21 соединены с сетью. Вход обратной связи регулятора 19 тока соединен с выходом датчика 15 тока, вход обратной связи регулятора 18 скорости соединен с выходом датчика 14 скорости, выход датчика 5 положения соединен со входом датчика 14 скорости и входом обратной связи регулятора 17 положения, задающий вход которого соединен с выходом блока 16 задания траектории движения. Блок 16 задания траектории движения реализует следующую функциональную зависимость:
Y=A•sin(w•t)
где Y - выходной сигнал блока задания траектории движения;
A - входной сигнал амплитуды перемещения;
w - входной сигнал задания частоты колебаний;
t - время.
В качестве преобразователя 3 вращательного движения в возвратно-поступательное может быть использована передача шестерня 7 - рейка 8 фиг. 2, рейка 8 которой перемещается по валкам 22, платформы 23 на которой также установлены электродвигатель 1 с шестерней 7 и канатоведущие шкивы 5 и 6.
Электропривод работает следующим образом. С пульта (на фиг. 2 не показан) управления станции задают параметры A и w, обеспечивающие малые амплитуды и частоту колебаний, затем пускателем 21 подают питание сети на преобразователь 20. Электропривод обеспечивает работу электродвигателя 1 в режиме малых перемещений. Затем, увеличивая параметры A и w, электропривод выводят на номинальный режим, определяющийся, например, максимальной производительностью исполнительного механизма 11. В процессе эксплуатации элекропривода и исполнительного механизма, например штангового насоса, максимальная производительность оперативно, по мере необходимости поддерживается соответствующей корректировкой параметров A и w, а также изменением массы противовеса 4. Датчик положения 13 может быть размещен на валу электродвигателя 1, на линейно перемещающейся части механического преобразователя 3, на штоке 10 исполнительного механизма 11.
Датчик 15 тока может быть включен в звено постоянного тока преобразователя 20, выполненного по схеме выпрямитель-инвертор при использовании асинхронного, синхронного или вентильно-индукторного двигателя, в фазу электродвигателя при использовании НПЧ или в цепь якоря электродвигателя постоянного тока при использовании в качестве преобразователя управляющего выпрямителя.
Датчик 14 скорости может быть выполнен в виде аналогичного устройства или импульсного типа. Преобразователь 20 может быть выполнен на транзисторах или тиристорах. Блоки 14, 15, 16 могут быть выполнены аналоговыми или цифровыми. Входы A и w могут быть организованы на потенциометрах или задаваться в виде кода от внешней управляющей ЭВМ.
Таким образом, предлагаемый электропривод обеспечивает повышение производительности исполнительных механизмов, упрощение механического преобразователя, а следовательно, повышение надежности, уменьшение стоимости.
Источники информации
1. Электрооборудование нефтяных и газовых промыслов. /Под. редакцией Б. М.Плюща. - М.: - Недра, 1965, с. 166 - 180, 193 - 198, рис. 5.1, 5.3, 5.7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2040110C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2007838C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОПРИВОД | 1996 |
|
RU2130229C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2025034C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046517C1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Устройство для испытания гибких кабельных изделий на многократные перемотки | 1990 |
|
SU1779949A1 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ЛИФТА | 2013 |
|
RU2561682C2 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
Изобретение относится к области электротехники и может быть использовано в нефтепромысловом оборудовании при добыче нефти. В электроприводе, содержащем электродвигатель, механический преобразователь (МП) вращательного движения в возвратно-поступательное с противовесом и станцию управления электроприводом, МП включает два канатоведущих шкива. Вращающая часть МП непосредственно соединена с валом электродвигателя, линейная часть через первый канат и первый канатоведущий шкив соединена со штоком исполнительного механизма, а через второй канат и второй токоведущий шкив соединена с противовесом. Вход обратной связи регулятора тока соединен с выходом датчика тока, вход обратной связи регулятора скорости соединен с выходом датчика скорости, выход датчика положения соединен со входом датчика скорости и входом обратной связи регулятора положения, задающий вход которого соединен с выходом блока задания траектории движения. В процессе эксплуатации электропривода и исполнительного механизма, например штангового насоса, максимальная производительность оперативно, по мере необходимости поддерживается соответствующей корректировкой параметров А и w, а также изменением массы противовеса. Технический результат: возможность регулирования и оптимизации режимов работы электропривода и исполнительного механизма при изменении условий эксплуатации. 1 з.п.ф-лы, 2 ил.
Y = A • sin(w • t),
где Y - выходной сигнал блока задания траектории движения;
А - входной сигнал амплитуды перемещения,
w - входной сигнал задания частоты колебаний;
t - время.
| Электрооборудование нефтяных и газовых промыслов | |||
| / Под ред | |||
| В.М.Плюща | |||
| - М.: Недра, 1965, с.166 - 180, 193 - 198, рис.5.1, 5.3, 5.7 | |||
| Устройство для автоматического управления электроприводом глубиннонасосной установки | 1976 |
|
SU752710A1 |
| Электростатический двигатель | 1979 |
|
SU780130A1 |
| Следящий электропривод | 1985 |
|
SU1332260A2 |
| DE 4222365 A, 13.01.94 | |||
| US 3767985 A, 23.10.73. | |||
