Изобретение относится к области электротехники, а именно к электроприводу переменного тока, и может быть использовано в электроприводах РЛС (радиолокационная станция), рулевом электроприводе.
Известен частотно-управляемый синхронный электропривод [Авторское свидетельство №1317634, опубл.: 15.06.1987. Бюл. 22], содержащий синхронный двигатель, к обмоткам статора которого подключены выходы регулируемого источника тока, датчик углового положения, установленный на валу синхронного двигателя, блок задания амплитуды тока статора, формирователь импульсов, два счетчика, каждый из которых снабжен входом записи и суммирующим входом, два постоянных запоминающих блока, два цифроаналоговых умножителя и сумматор.
Недостатками указанного устройства является наличие двух датчиков: датчика положения ротора и датчика частоты вращения ротора, также регулирование тока двигателя осуществляется в трехфазной системе координат. Указанные факторы приводят к снижению надежности устройства и к большим пульсациям момента на высоких скоростях вращения.
Кроме того, известен электропривод переменного тока [Авторское свидетельство №1367121, опубл.: 15.09.1987. Бюл. 20], являющийся прототипом предлагаемого изобретения, содержащий синхронный электродвигатель, подключенный фазными обмотками к выходу автономного инвертора напряжения, блок задания управляющего сигнала, блок переменного перемножения, датчик фазных токов, выход которого подключен к первому входу блока перемножения, второй вход которого подключен к выходу блока задания управляющего сигнала, а выход блока перемножения соединен с управляющим входом автономного инвертора напряжения.
Недостатком указанного устройства является то, что на высоких скоростях вращения ротора двигателя регулятор уходит в насыщение. Насыщается та фаза, в которой наблюдается наибольшее ЭДС. В то время как в других фазах формируемый желаемый ток, в той фазе, где произошло насыщение, ток отличается. Это приводит к тому, что вектор тока не только ограничивается по модулю, но и формируется с переменным углом относительно вектора потока. Это приводит к дополнительным пульсациям момента, что ухудшает точность управления электроприводом.
Техническим результатом изобретения является увеличение диапазона регулирования скорости электродвигателя, улучшение эксплуатационных характеристик двигателя и повышение надежности электропривода.
Указанный технический результат достигается тем, что в известный электропривод, содержащий синхронный двигатель на постоянных магнитах, датчик положения ротора, инвертор напряжения, вводится задатчик модуля тока 8, регулятор модуля тока 6, векторный модулятор 4 с двумя входами и тремя выходами, преобразователем координат 5 и два сумматора 9, 10, при этом выход задатчика модуля тока подключен к первому входу 9 сумматора.
Кроме того, в схему может быть введен сумматор 11, включенный между выходом регулятора фазных токов и вторым входом векторного модулятора, при этом второй вход сумматора 11 соединен с выходом датчика положения ротора.
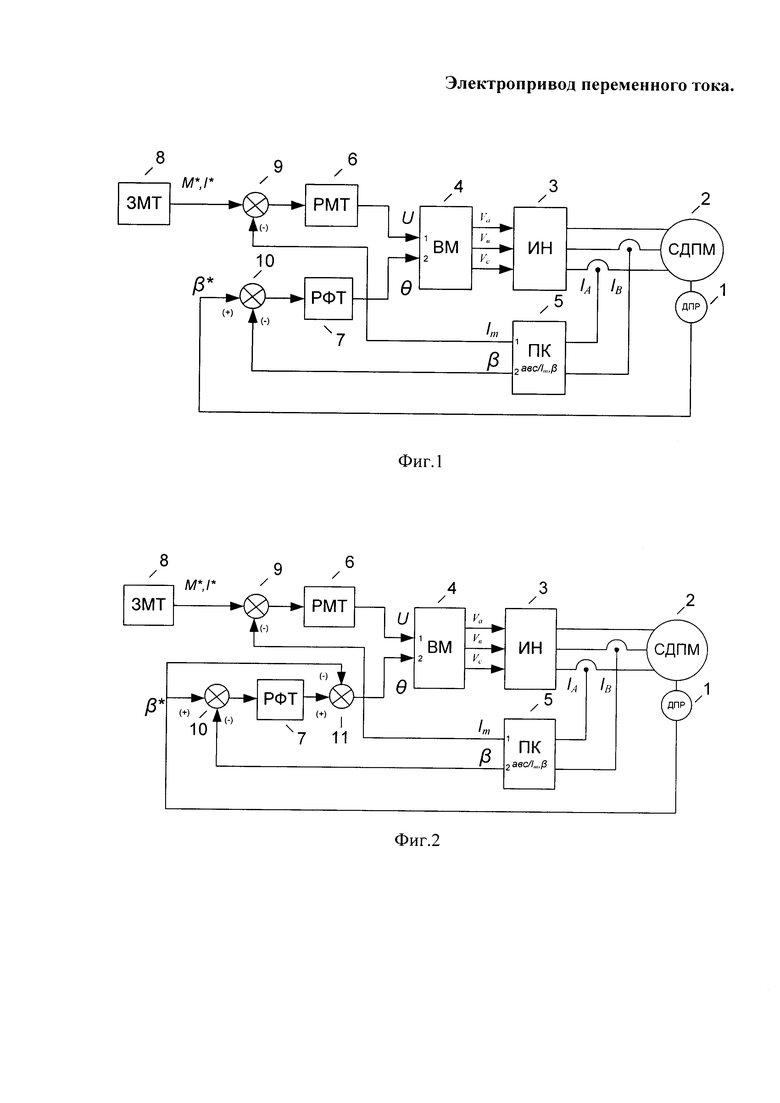
На Фиг. 1 представлена структурная схема предлагаемого электропривода
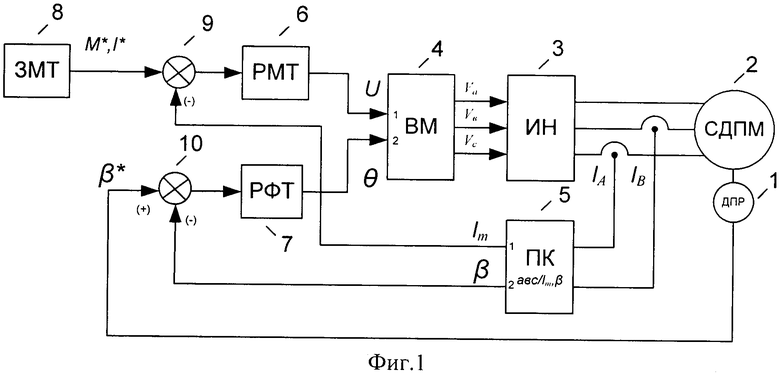
На Фиг. 2 представлен вариант электропривода с дополнительным сумматором.
Электропривод переменного тока содержит датчик положения ротора 1, соединенный с ротором синхронного двигателя на постоянных магнитах 2, подключенный фазными обмотками к выходу инвертора напряжения 3, на вход которого подключен векторный модулятор 4, на первый вход которого подключен регулятор модуля тока 6, к входу которого подключен сумматор 9, к первому входу которого подключен задатчик модуля тока 8, к второму входу которого подключен первый выход преобразователя координат 5, вход которого подключен к датчикам фазных токов двигателя. Второй вход векторного модулятора 4 подключен к выходу регулятора фазы тока 7, вход которого подключен к 10 сумматору, первый вход которого подключен к второму выходу преобразователя координат, второй вход подключен к выходу датчика положения.
На Фиг. 2 приведена схема электропривода, в котором введен сумматор 11, включенный между выходом регулятора фазных токов и вторым входом векторного модулятора, при этом второй вход сумматора 11 соединен с выходом датчика положения ротора.
Заявленное устройство работает следующим образом.
Сигналы IA, IB мгновенных значений синусоидальных токов синхронного электродвигателя на постоянных магнитах с выхода датчика тока поступают на вход блока преобразования координат 5. В блоке преобразования координат происходит преобразование из трехфазной системы координат в полярную систему координат. С выхода блока 5 сигнал Im поступает на второй вход сумматора 9, на первый вход которого поступает сигнал I* с блока задания модуля тока 8, с выхода которого подается сигнал рассогласования на блок регулятора тока 6. Сигнал β угол вектора тока поступает на первый вход сумматора 10, на второй вход которого подается сигнал β* с датчика положения ротора 1, с выхода которого подается сигнал рассогласования на вход блока регулятора фазы 7. В блоках 6 и 7 происходит регулирование значения тока и регулирование угла вектора тока. С выхода блока 6 подается сигнал U на вход блока 4, с выхода блока 7 подается сигнал Θ на вход блока 4. С выхода блока 4 сигналы Va, Vb, Vc задания на напряжения поступают на управляющий вход инвертора напряжения 3, на выходе которого формируются три синусоидальных напряжения Ua, Ub, Uc, пропорциональных сигналам Va, Vb, Vc. Частота этих сигналов равна частоте токов IA, IB, IC фазных обмоток электродвигателя 1 и определяется частотой вращения, а фаза совпадает с фазой сигналов IA, IB, IC.
Электропривод, схема которого представлена на Фиг. 2, работает следующим образом.
Сигналы IA, IB мгновенных значений синусоидальных токов синхронного электродвигателя на постоянных магнитах с выхода датчика тока поступают на вход блока преобразования координат 5. В блоке преобразования координат происходит преобразование из трехфазной системы координат в полярную систему координат. С выхода блока 5 сигнал Im поступает на второй вход сумматора 9, на первый вход которого поступает сигнал I* с блока задания модуля тока 8, с выхода которого подается сигнал рассогласования на блок регулятора тока 6. Сигнал β угол вектора тока поступает на первый вход сумматора 10, на второй вход которого подается сигнал β с датчика 1 положения ротора, с выхода которого подается сигнал рассогласования на вход блока регулятора фазы 7. С выхода блока регулятора фазы 7 подается сигнал на первый вход сумматора 11, на второй вход которого подается сигнал β с датчика 1 положения ротора. В блоках 6 и 7 происходит регулирование значения тока и регулирование угла вектора тока. С выхода блока 6 подается сигнал U на первый вход блока 4, с выхода сумматора 11 подается сигнал Θ на второй вход блока 4. С выхода блока 4 сигналы Va, Vb, Vc задания на напряжения поступают на управляющий вход инвертора 3 напряжения, на выходе которого формируются три синусоидальных напряжения Ua, Ub, Uc, пропорциональных сигналам Va, Vb, Vc. Частота этих сигналов равна частоте токов ΙΑ, IB, IC фазных обмоток электродвигателя 1 и определяется частотой вращения, а фаза совпадает с фазой сигналов IA, IB, IC.
Заявленное устройство позволяет увеличить диапазон регулирования скорости электродвигателя, за счет регулирования токов двигателя в полярной системе координат улучшение эксплуатационных характеристик двигателя и повышение надежности электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
Изобретение относится к области электротехники и может быть использовано в электроприводах РЛС (радиолокационная станция), рулевом электроприводе. Техническим результатом является увеличение диапазона регулирования скорости электродвигателя за счет регулирования токов двигателя в полярной системе координат, улучшение эксплуатационных характеристик двигателя и повышение надежности электропривода. Электропривод переменного тока содержит датчик положения ротора, соединенный с ротором синхронного двигателя на постоянных магнитах, подключенный фазными обмотками к выходу инвертора напряжения, на вход которого подключен векторный модулятор, на первый вход которого подключен регулятор модуля тока, к входу которого подключен сумматор, к первому входу которого подключен задатчик модуля тока, к второму входу которого подключен первый выход преобразователя координат, вход которого подключен к датчикам фазных токов двигателя. Второй вход векторного модулятора подключен к выходу регулятора фазы тока, вход которого подключен к сумматору, первый вход которого подключен к второму выходу преобразователя координат, второй вход подключен к выходу датчика положения. Электропривод может содержать сумматор, включенный между выходом регулятора фазных токов и вторым входом векторного модулятора, при этом второй вход сумматора соединен с выходом датчика положения ротора. 1 з.п. ф-лы, 2 ил.
.
1. Электропривод переменного тока, содержащий задатчик вращающего момента, синхронный двигатель (СДПМ), фазными обмотками подключенный к выходам инвертора напряжения, а выходной вал СДПМ сочленен с датчиком положения ротора, также два датчика фазных токов, отличающийся тем, что с целью увеличение диапазона регулирования скорости высокоскоростных электроприводов в него введены регулятор модуля тока 6, векторный модулятор 4 с двумя входами и тремя выходами, преобразователь координат 5 и два сумматора, при этом выход задатчика вращающего момента подключен к первому входу первого сумматора, выход которого через регулятор модуля тока подключен к первому входу векторного модулятора, ко второму входу подключен через регулятор фазы тока выход второго сумматора, к первому выходу которого подключен выход датчика положения ротора 1, а ко второму входу соответственно второй выход преобразователя координат, ко входам которого подключены выходы датчиков фазных токов, первый выход преобразователя координат подключен ко второму входу первого сумматора, а три выхода векторного модулятора подключены к соответствующим входам инвертора напряжения.
2. Электропривод переменного тока по п. 1, отличающийся тем, что введен сумматор 11, включенный между выходом регулятора фазных токов и вторым входом векторного модулятора, при этом второй вход сумматора 11 соединен с выходом датчика положения ротора.
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ СИСТЕМЫ ПРИВОДА ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2391767C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Выходное устройство для системы управления преобразователем | 1977 |
|
SU653721A1 |
| DE 19636784 B4, 05.09.2003 | |||
| FR 2918819 B1, 05.10.2012 | |||
| JP 2014107880 A, 09.06.2014 | |||
| US 2002171389 A1, 21.11.2002 | |||
| WO 2009007416 A, 15.01.2009. | |||

