(/
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1112520A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Устройство для регулирования скорости асинхронного двигателя | 1982 |
|
SU1064411A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Электропривод | 1983 |
|
SU1170575A1 |
| Частотно-управляемый электропривод | 1987 |
|
SU1453576A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |

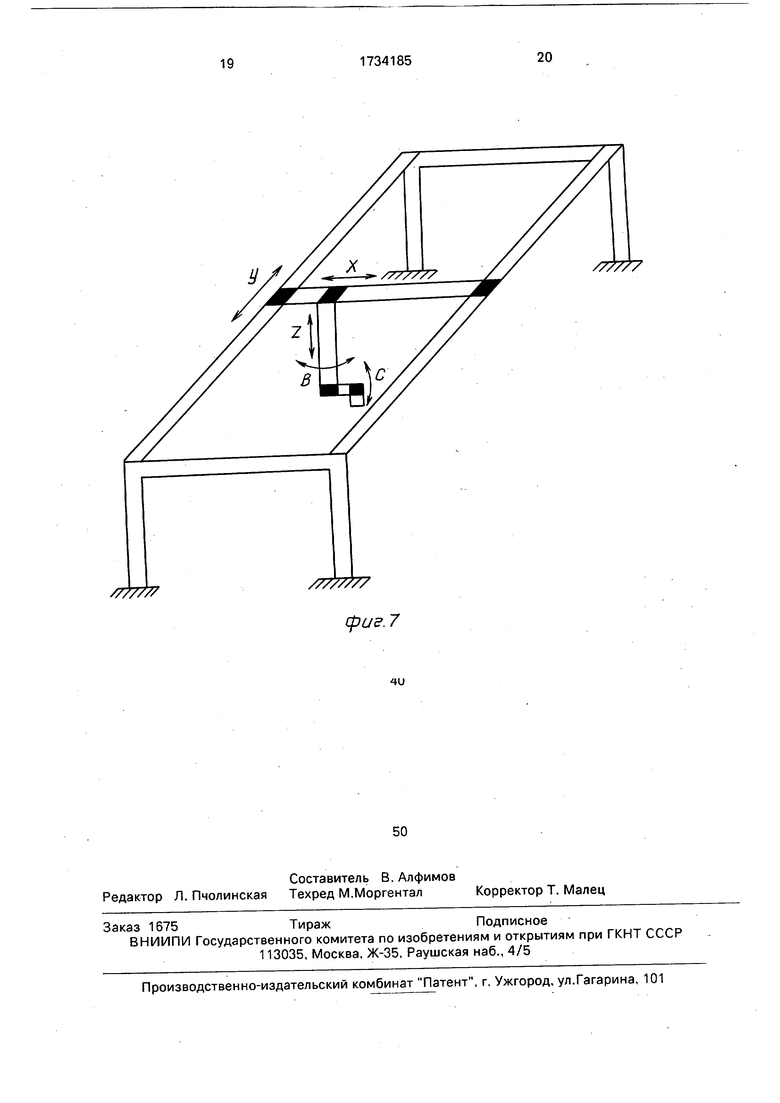
Изобретение относится к электротехнике и может быть использовано в промыш- леных системах воспроизведения движений, например, для лазерной резки, сварки и сборки протяженных изделий, в частности, в судостроении. Цель изобретения состоит в повышении точности. В электроприводе обеспечивается повышенная точность управления путем реализации грубого управления асинхронными поворотными двигателями и ленточным движителем и точного управления линейным двигателем в пределах упругой деформации ленточного движителя. 7 ил.
Изобретение относится к электротехнике и может быть использовано в промышленных системах воспроизведения движений, например, для лазерной резки, сварки и сборки протяженных изделий, в частности, в судостроении.
Известен электропривод, содержащий асинхронный двигатель, подключенный к преобразователю, импульсный датчик положения с двумя последовательностями импульсов на выходе, систему управления, составленную из двух частей, одна из которых выполнена на аналоговых блоках, а другая - на базе - цифрового решающего устройства, при этом в первую часть входит импульсно-аналоговый преобразователь, входы которого связаны с импульсным датчиком положения через блок учетверения импульсов датчика положения, а выход подключен к первому блоку сравнения, второй вход которого соединен с блоком задания частоты вращения, а выход через пропорци- ональноинтегральный регулятор подключен к блоку определения абсолютного значения сигнала и блоку определения полярности, выход блока подключен к входу аналого-им- пульсного преобразователя. Цифрорешаю- щее устройство выполнено на микропроцессоре, составленном из блока обработки информации, блока задания программы управления и блока задания функций. Кроме того, схема управления электроприводом содержит два логических элемента И, три логических элемента ИЛИ, логический элемент НЕ, блок вычисления момента, блок определения скорости, блок определения скольжения, два блока суммирования, блок задания амплитуды тока,
VI
СО N
00 СЛ
цифроаналоговые преобразователи, причем в цифровой части системы управления блоки обработки информации, задания программы управления, задания функций, вычисления моментов, определения скорости, определения скольжения, суммирования, задания амплитуды тока и цифроаналого- вых преобразователей соединены между собой общей шиной данных. Вторые входы цифроаналоговых преобразователей соеди- нены с выходом блока задания амплитуды тока, а их выходы являются выходами цифровой части системы управления. Выход определения направления вращения блока учетверения импульсов датчика положения подключен к общей шине данных, а выходы Вперед и Назад этого блока подключены к первому логическому элементу И, выход Вперед подключен к входу второго элемента И, а Назад - к входу третьего элемента И, выход первого логического элемента И соединен с входом блока определения скорости, выход аналого-импульсного поеобоазователя подключен к входам блоков вычисления момента определения скольжения, выход последнего соединен с первыми входами двух элементов И, второй вход первого элемента И, а также второй вход второго элемента И через логический элемент НЕ соединены с выходом блока оп- ределения полярности и общей шиной данных, выходы первого и второго элементов И соединены с другими входами второго и третьего элементов И, выходы которых подключены соответственно к первому и второ- му блокам суммирования. К входу управления преобразователем подключен генератор пилообразного напряжения. Схема преобразователя для питания асинхрон- ного двигателя включает в себя широтно-импульсный модулятор, который содержит компараторы схемы НЕ и формирователи, инвертор, который включает в себя шесть силовых транзисторов и шесть диодов и трехфазный двухполупериодный выпрямитель. Каждый из компараторов предназначен для сравнения амплитуды пилообразного сигнала с амплитудой соответствующего трехфазного сигнала переменного тока и формирования 1, ког- да амплитуда входного сигнала переменного тока больше пилообразного сигнала, или О, когда амплитуда пилообразного сигнала больше.
Однако известный электропривод не обеспечивает высокую точность позиционирования, в частности, когда вал двигателя связан с подвижной кареткой упругой лентой.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является электропривод, содержащий асинхронный двигатель, датчик токов статора, датчик скорости, механически связанный с датчиком угла и синхронным двигателем, подключенным через усилитель мощности к выходу релейного регулятора токов, один вход которого подключен к выходу датчика токов статора, вход которого подключен к выходу усилителя мощности, другой вход релейного регулятора токов соединен с выходом функционального блока задания амплитуды и фазы тока, один вход которого подключен к выходу датчика угла, а другой его вход соединен с выходом узла токоограничения, регулятор скорости, один вход которого подключен к выходу датчика угла, а другой его вход соединен с выходом узла токоограничения, регулятор скорости, один вход которого подключен к выходу датчика скорости, выпрямитель, ограничитель напряжения, инерционное звено, при этом выход последнего подключен к входу узла токоограничения и его вход соединен с выходом ограничителя напряжения, один вход которого подключен к выходу регулятора скорости, а его другой вход через выпрямитель соединен с выходом датчика скорости.
Однако известный электропривод на базе линейного синхронного двигателя не обеспечивает получение требуемой точности особенно в динамическом режиме в связи с недостаточным усилием, развиваемым линейным двигателем. Кроме того, линейный двигатель не обеспечивает перемещения больше 1 м, а в связи с техническими трудностями реализации требуемого зазора 0,1-0,15 мм между неподвижной и подвижной частями линейного двигателя, лазерной резке, сварке и сборке протяженных изделий (корпусов кораблей и т.д.) требуются перемещения на 8-12 м.
Цель изобретения - повышение точности электропривода.
Поставленная цель достигается тем, что в электроприводе, содержащем линейный электропривод, состоящий из последовательно соединенных устройства числового программного управления, первого цифро- аналогового преобразователя, первого пропорционально-интегрального регулятора, первого ограничителя напряжения, первого инерционного звена, первого узла токоограничения, функционального преобразователя, первого релейного регулятора тока, первого усилителя мощности и линейного синхронного двигателя, выход которого соединен с первым фазовращателем, последовательно соединенных преобразователя фаза - код, второго цифроаналогового преобразователя и выпрямителя, первого датчика тока, входом соединенного с выходом первого усилителя мощности, а выходом - с вторым входом первого релейного регулятора тока, формирователя импульсных сигналов перемещения, входом соединенного с выходом преобразователя фаза - код, а выходом - с входом устройства числового программного управления, причем выход первого фазовращателя соединен с вторым входом функционального преобразователя и входом преобразователя фаза - код, выход выпрямителя соединен с вторым входом первого ограничителя напряжения, выход второго цифроаналогового преобразователя соединен с вторым инверсным входом первого сумматора, первый асинхронный электропривод, состоящий из последовательносоединенныхформирователя амплитуды и фазы тока статора, первого формирователя задания фазных токов, второго релейного регулятора тока, второго усилителя мощности и первого асинхронного двигателя, вал которого соединен с вторым фазовращателем и первой гибкой лентой с одной стороной подвижной части линейного синхронного двигателя, последовательно соединенных первого формирователя частоты скольжения первого асинхронного двигателя и первого сумматора частоты и формирователя импульсных сигналов, выход которого соединен с вторым входом первого формирова- теля задания фазных токов, первого формирователя частоты вращения первого асинхронного двигателя, вход соединенного с выходом второго фазовращателя, а выходом - с вторым входом первого сумматора частоты и формирователя импульсных сигналов, второго датчика тока, входом соединенного с выходом второго усилителя мощности, а выходом - с вторым входом второго релейного регулятора тока, первого генератора опорной частоты, выходом соединенного с вторым входом первого формирователя амплитуды и фазы тока статора, второй асинхронный привод, состоящий из последовательно соединенных второго формирователя амплитуды и фазы тока статора, второго формирователя задания фазных токов, третьего релейного регулятора тока, третьего усилителя мощности и второго асинхронного двигателя, вал которого соединен с третьим фазовращателем и второй гибкой лентой с другой стороной подвижной части линейного синхронного двигателя, последовательно соединенные второй формирователь частоты скольжения
и второй сумматор частоты и формирователь импульсных сигналов, выход которого соединен с вторым входом второго формирователя задания фазных токов, второго
формирователя частоты вращения второго асинхронного двигателя, входом соединенного с выходом третьего фазовращателя, а выходом соединенного с вторым входом второго сумматора частоты и формировате0 ля импульсных сигналов, третьего датчика тока, входом соединенного с выходом третьего усилителя мощности, а выходом - с вторым входом третьего релейного регулятора тока, второго генератора опорной частоты,
5 выходом соединенного с вторым входом второго формирователя амплитуды и фазы тока статора, дополнительно введены последовательно соединенные второй сумматор, второй пропорционально-интегральный регу0 лятор, второй ограничитель напряжения, второе инерционное звено, второй узел токоограничения, первое нелинейное звено и третий сумматор, последовательно соединенные второе нелинейное звено и четвер5 тый сумматор, первый источник опорного напряжения, выходом соединенный с вторым входом третьего сумматора и второй источник опорного напряжения, выходом соединенный с вторым входом четвертого
0 сумматора, причем входы второго сумматора соединены с выходами первого сумматора и первого узла токоограничения, вход второго нелинейного звена соединен с выходом второго узла токоограничения, выход
5 третьего сумматора соединен с входами первого формирователя амплитуды и фазы тока статора и первого формирователя частоты скольжения первого асинхронного двигателя, а выходы четвертого сумматора
0 соединены с входами второго формирователя амплитуды и фазы тока статора и второго формирователя частоты скольжения второго асинхронного двигателя.
5
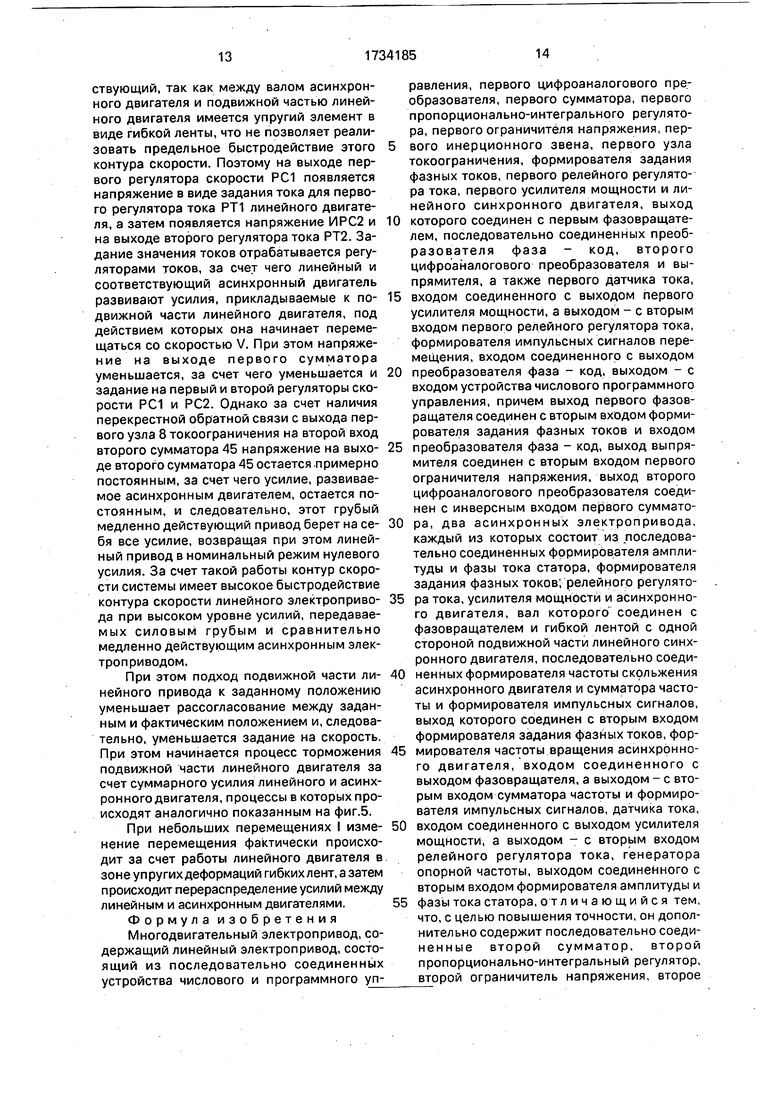
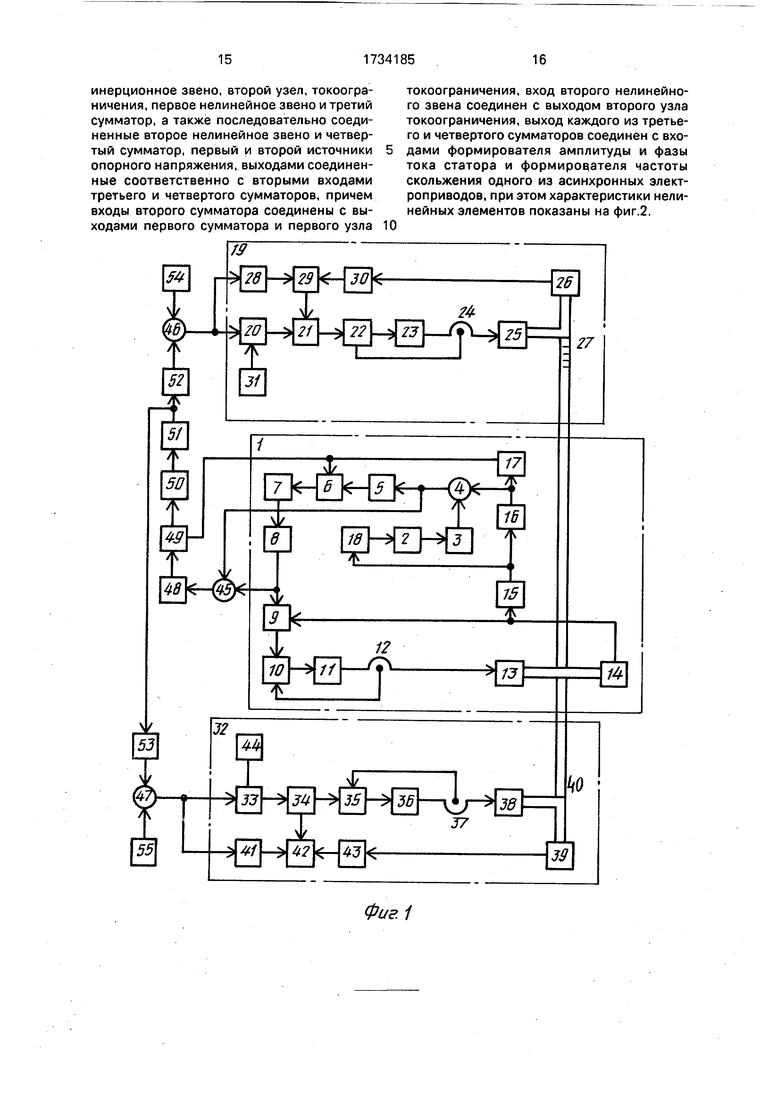
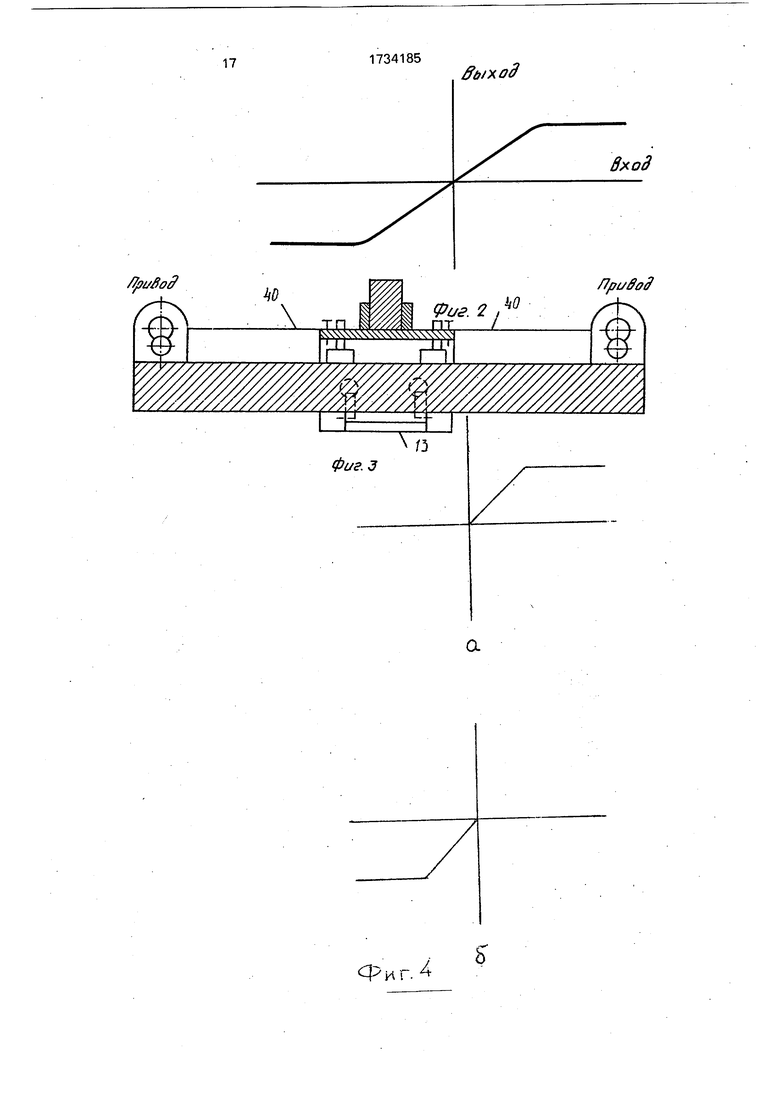
На фиг.1 показана схема электропривода; на фиг.2 - зависимость заданной скорости от перемещения; на фиг.З - конструкция линейного двигателя; на фиг.4 - характери0 стики нелинейных звеньев; на фиг.5 - временные диаграммы переходных процессов; на фиг.6 - структурная схема управления по координате; на фиг.7 - конструктивная схема робота.
5Электропривод содержит линейный
электропривод 1, состоящий из устройства 2 числового программного управления, первого цифроаналогового преобразователя ЦАП 3, первого сумматора 4, первого пропорционально-интегрального регулятора
(ПИР) 5, первого ограничителя 6 напряжения, первого инерционного звена 7,первого узла 8 токоограничения, формирователя 9 задания фазных токов (ФЗФТ). первого релейного регулятора 10 тока, первого усилителя 11 мощности, первого датчика 12 тока, линейного синхронного двигателя 13, первого фазовращателя 14, преобразователя 15 фаза - код, второго ЦАП 16, выпрямителя 17 и формирователя 18 импульсных сигналов перемещения 18, первый асинхронный электропривод 19, состоящий из первого формирователя 20 амплитуды и фазы тока статора, первого формирователя 21 задания фазных токов, второго релейного регулятора 22 тока, второго усилителя мощности 23, второго датчика 24 тока, первого асинхронного двигателя 25, вал которого связан с вторым фазовращателем 26 и первой гибкой лентой 27 с одной стороной подвижной части линейного синхронного двигателя 13, первого формирователя 8 частоты скольжения, первого асинхронного двигателя 25, первого сумматора частоты и формирователя 29 импульсных сигналов, первого формирователя 30 частоты вращения, первого асинхронного двигателя и первого генератора 31 опорной частоты, второй асинхронный электропривод 32, состоящий из второго формирователя 33 амплитуды и фазы тока статора, второго ФЗФТ 34, третьего датчика 37 тока, второго асинхронного двигателя 38, вал которого связан с третьим фазовращателем 39 и второй гибкой лентой 40 с другой стороной подвижной части линейного синхронного двигателя 13, второго формирователя 41 частоты скольжения, второго асинхронного двигателя 38, второго сумматора частоты и формирователя 42 импульсных сигналов, второго формирователя 43 частоты вращения, второго асинхронного двигателя 38 и второго генератора 44 опорной частоты, второго 45, третьего 46 и четвертого 47 сумматоров, второго ПИР 48, второго ограничителя 49 напряжения, второго инерционного звена 50, второго узла 51 токоограничения,первого 52 и второго 53 нелинейного звена и первого 54 и второго 55 источников опорного напряжения.
Электропривод работает следующим образом.
Устройство 2 числового программного управления реализовано на микропроцессоре и состоит из программного датчика положения, блока обработки информации и цифрового регулятора положения. Фактическое положение подвижной части линейного синхронного двигателя 13, измеренного с помощью первого фазовращателя 14, преобразователя 15 фаза - код и формирователя 18 импульсных сигналов перемещения, сравнивается с заданным положением, вырабатываемым программным задатчиком, и
подается в блок цифрового регулятора, в котором вырабатывается код задания на скорость в соответствии с нелинейной зависимостью, показанной на фиг.2. Нелинейная зависимость имеет линейный участок,
0 определяемый требуемой добротностью линейного синхронного привода 1, а при больших ошибках заданного и фактического положения выходной код принимает постоянное значение для ограничения скорости
5 перемещения.
Сформулированный таким образом код задания на скорость перемещения подается на вход первого цифроаналогового преобразователя 3, на выходе которого формиру0 ется аналоговое напряжение, пропорциональное величине заданной скорости перемещения. Напряжение, пропорциональное заданной скорости перемещения, поступает на первый вход
5 первого сумматора 4, на второй инверсный вход которого подается напряжение, пропорциональное фактической скорости перемещения, измеренной фазовращателем 14, преобразователем 15 фаза - код и преобра0 зованного в аналоговую величину вторым цифроаналоговым преобразователем 16. Полученная разность напряжений на выходе первого сумматора 4, пропорциональная разности заданной и фактической скоро5 стей движения, подается на вход первого ПИР 5, являющегося регулятором скорости линейного синхронного привода 1. С выхода первого ПИР 5 напряжение подается на первый вход первого ограничителя 6 напря0 жения, на второй вход которого подается напряжение с выхода второго ЦАП 16 через выпрямитель 17. Первый ограничитель 6 напряжения ограничивает скорость перемещения линейного синхронного двигателя
5 13. С выхода первого ограничителя 6 напряжения напряжение поступает на первое инерционное звено 7, необходимое для ограничения изменения тока линейного синхронного двигателя 13. С выхода первого
0 инерционного звена 7 напряжение подается на первый узел 8 токоограничения, необходимое для ограничения тока линейного синхронного двигателя 13. С выхода первого узла токоограничения 8 напряжение по5 дается на ФЗФТ 9, который состоит из формирователя синусоидальных функций угла и умножителя сигналов, выход которого подключен к первому входу первого релейного регулятора 10 тока, один из входов умножителя сигналов подключен к выходу
первого узла 8 токоограничения, другой вход умножителя подключен через формирователь синусоидальных функций угла к выходу первого фазовращателя 14, являющегося фактически датчиком положения подвижной части линейного синхронного двигателя 13 относительно подвижной части. На выходе ФЗФТ 9 формируются напряжения, являющиеся синусоидальными функциями положения подвижной части линейного синхронного двигателя 13 относительно неподвижной (амплитуда этих напряжений пропорциональна сигналу задания усилия, развиваемого линейным синхронным двигателем 13), и поступающее с выхода первого узла токоогоаничения 8. В первом релейном регуляторе 10 тока сравниваются токи, протекающие в фазах двигателя 13 и измеренные первым датчиком тока 12с сигналами задания тока. При этом релейные элементы с гистерезисом, число которых равно числу фаз линейного двигателя 13, включают и отключают соответствующие силовые ключи первого усилителя 11 мощности. В результате этого токи в фазах двигателя 13 соответствуют сигналам задания.
В зависимости от знака сигнала задания усилия, поступающего на вход ФЗФТ9, задания амплитуды и базы тока база токов в обмотках двигателя меняется на 180° , при этом меняется знак усилия, развиваемого линейным двигателем 13. Таким образом, линейный синхронный электропривод 1 функционирует как обычная одноканальная система управления положением подвижной части линейного синхронного двигателя 13.
Для повышения усилия, необходимого для перемещения подвижной части линейного двигателя 13, используется первый асинхронный электропривод 19 с первым асинхронным двигателем 25, вал которого через первую гибкую ленту 27 связан с одной стороной подвижной части линейного двигателя 13 и второй асинхронный электропривод 32 с вторым асинхронным двигателем 38, вал которого через вторую упругую ленту 40 связан с другой стороной подвижной части линейного двигателя 13.
Таким образом, в электроприводе при движении в одну сторону фактически имеется два канала управления: грубое перемещение осуществляется за счет работы первого или второго асинхронного поворотного электропривода и ленточного движителя в виде первой или второй гибкой ленты, и точное перемещение в пределах упругости гибких лент с помощью линейного синхронного привода.
Рассмотрим формирование сигналов управления для первого или второго асинхронного электропривода.
Сигнал, пропорциональный разности
заданной и фактической скоростей движения подвижной части линейного двигателя 13с выхода певого сумматора 4 подается на первый вход второго сумматора 45, на второй вход которого подается напряжение с
0 выхода первого узла токоограничителя 8, пропорционального усилию, развиваемому линейным приводом. С выхода второго сумматора 45 напряжение подается на вход второго ПИР 48, являющегося регулятором
5 скорости вращения первого второго асинхронного электропривода. С выхода второго ПИР 48 напряжение подается на первый вход второго ограничителя 49 напряжения для ограничения скорости вращения перво0 го или второго асинхронного двигателя. На второй вход второго ограничителя 49 напряжения поступает напряжение, пропорциональное фактической скорости перемещения подвижной части линейного
5 двигателя 13 с выхода второго ЦАП 16 и через выпрямитель 17. С выхода второго ограничителя напряжения 49 напряжение поступает на вход второго инерционного звена 50 для ограничения скорости измене0 ния тока в первом 25 или втором 38 асинхронном двигателе.
С выхода второго инерционного звена 50 напряжение подается на второй узел 51 токоограничения для ограничения тока ста5 тора первого 25 или второго 38 асинхронного двигателя. С выхода второго узла 51 токоограничения напряжение, пропорциональное току первого или второго асинхронного двигателя, одновременно подается на
0 входы первого 52 и второго 53 нелинейных звеньев, характеристики которых показаны на фиг.4. Если напряжение на выходе второго узла 51 токоограничения - положительное, то напряжение на выходе нелинейного
5 звена 52 равно выходному напряжению на выходе второго узла токоограничения 51, а напряжение на выходе второго нелинейного звена 53 равно нулю и, следовательно, работает первый асинхронный электропри0 вод 19 и тянет через первую гибкую ленту 27 подвижную часть линейного двигателя 13 в сторону расположения первого асинхронного двигателя 25. В этом случае напряжение с выхода первого нелинейного звена 52
5 через третий сумматор 46 подается на вход первого формирователя амплитуды и фазы тока статора первого асинхронного двигателя 25. Одновременно сигнал с выхода третьего сумматора 46 подается на вход первого формирователя 28 частоты скольжения перво го асинхронного двигателя 25. С выхода второго фазовращателя 26 напряжение поступает на вход первого формирователя 30 частоты вращения первого асинхронного двигателя 25. С выхода первого формирователя 28 частоты скольжения напряжение поступает на первый вход первого сумматора частоты и формирователя 29 импульсных сигналов, второй вход которого соединен с выходом первого формирователя 30 частоты вращения. Поэтому на выходе блока 29 формируется требуемая частота питания статорных обмоток первого асинхронного двигателя 25. Выход первого формирователя амплитуды и фазы токов статора 20 соединен с первым выходом первого формирователя задания фазных токов 21, второй вход которого соединен с выходом первого сумматора частоты и формирователя импульсных сигналов 29. Таким образом, на выходе первого формирователя задания фазных токов 21 формируются такие задания токов, амплитуда и частота которых необходимы при частотно-токовом управлении первым асинхронным двигателем 25. Момент, развиваемый первым асинхронным двигателем 25, пропорционален напряжению на выходе третьего сумматора 46. Для нормальной работы первого формирователя 20 амплитуды и фазы тока статора первого асинхронного двигателя 25 его второго вход соединен с выходом первого генератора опорной частоты 31. Во втором релейном регуляторе 22 тока производится сравнение токов, протекающих в фазах первого асинхронного двигателя 25 и измеренных вторым датчиком 24 тока с сигналами задания фазных токов первого асинхронного двигателя 25. При этом релейные элементы с гистерезисом, число которых равно числу фаз первого асинхронного двигателя 25, включают и отключают соответствующие силовые ключи второго усилителя 23 мощности таким образом, что токи в фазах двигателя 25 соответствуют сигналам задания. При появлении на выходе второго узла 51 токоограничения отрицательного напряжения, на выходе первого нелинейного звена 52 устанавливается нулевое напряжение, а на выходе второго нелинейного звена 53 - максимальное. Начинает работать второй асинхронный электропривод 32 и тянет вторую гибкую ленту 40, подвижную часть линейного двигателя 13 в сторону расположения второго асинхронного двигателя 38. При этом с выхода второго нелинейного звена 53 напряжение через четвертый сумматор 47 поступает на вход второго формирователя 33 амплитуды и фазы тока статора второго асинхронного двигателя 38,
выход которого соединен с первым входом второго формирователя 34 задания фазных токов второго асинхронного двигателя 38. Одновременно с выхода четвертого сумматора 47 напряжение подается на второй формирователь 41 частоты скольжения второго асинхронного двигателя 38, выход которого соединен с первым входом второго сумматора частоты и формирователем 42
импульсных сигналов. Выход третьего фазовращателя 39 соединен с входом второго формирователя частоты вращения 43 второго асинхронного двигателя 38, выход которого соединен с вторым входом второго
сумматора частоты и формирователем 42 импульсных сигналов. Выход блока 42 соединен с вторым входом второго формирователя 34 задания фазных токов второго асинхронного двигателя 38. Таким образом,
на выходе блока 42 формируются задания фазных токов для второго асинхронного двигателя 38 в соответствии с принципом частотно-токового управления так, что амплитуда тока статора и частоты скольжения
пропорциональны моменту второго асинхронного двигателя 38, задаваемого выходным нал ряжением четвертого сумматора 47.
Для нормальной работы второго формирователя 33 амплитуды и фазы тока статора второго асинхронного двигателя 38 его второй вход соединен с выходом второго генератора 44 опорных частот.
Для создания предварительного натяжения первой 27 и второй 40 гибких лент служат первый 54 и второй 55 источники опорного напряжения, выходы которых соединены соответственно с вторыми входами третьего 46 и четвертого 47 сумматоров.
Рассмотрим процессы, происходящие в электроприводе при ступенчатом изменении заданного положения (фиг.5).
При скачкообразном изменении заданного значения положения з, вырабатываемого в программном задатчике (ПЗ) устройства числового программного управления (УЧПУ), вырабатывается сигнал задания на скорость Vs в цифровом регуляторе положения, также имеющемся в составе
блока 2, и через блок .3 подается на вход первого сумматора 4. С выхода первого сумматора напряжение одновременно поступает на вход первого РС1 и второго РС2 регуляторов скорости, функцию которых выполняют блоки 5 и 48. Первый регулятор скорости РС1, образующий контур скорости линейного электропривода, является достаточно быстродействующим и реализует пре- дельную полосу пропускания. Второй регулятор скорости РС2 менее быстродействующий, так как между валом асинхронного двигателя и подвижной частью линейного двигателя имеется упругий элемент в виде гибкой ленты, что не позволяет реализовать предельное быстродействие этого контура скорости. Поэтому на выходе первого регулятора скорости РС1 появляется напряжение в виде задания тока для первого регулятора тока РТ1 линейного двигателя, а затем появляется напряжение ИРС2 и на выходе второго регулятора тока РТ2. Задание значения токов отрабатывается регуляторами токов, за счет чего линейный и соответствующий асинхронный двигатель развивают усилия, прикладываемые к подвижной части линейного двигателя, под действием которых она начинает перемещаться со скоростью V. При этом напряжение на выходе первого сумматора уменьшается, за счет чего уменьшается и задание на первый и второй регуляторы скорости РС1 и РС2. Однако за счет наличия перекрестной обратной связи с выхода первого узла 8 токоограничения на второй вход второго сумматора 45 напряжение на выходе второго сумматора 45 остается .примерно постоянным, за счет чего усилие, развиваемое асинхронным двигателем, остается постоянным, и следовательно, этот грубый медленно действующий привод берет на себя все усилие, возвращая при этом линейный привод в номинальный режим нулевого усилия. За счет такой работы контур скорости системы имеет высокое быстродействие контура скорости линейного электропривода при высоком уровне усилий, передавае- мых силовым грубым и сравнительно медленно действующим асинхронным электроприводом.
При этом подход подвижной части линейного привода к заданному положению уменьшает рассогласование между заданным и фактическим положением и, следовательно, уменьшается задание на скорость. При этом начинается процесс торможения подвижной части линейного двигателя за счет суммарного усилия линейного и асинхронного двигателя, процессы в которых происходят аналогично показанным на фиг.5.
При небольших перемещениях I изменение перемещения фактически происходит за счет работы линейного двигателя в зоне уп ругих деформаций гибких лент, а затем происходит перераспределение усилий между линейным и асинхронным двигателями.
Формула изобретения
Многодвигательный электропривод, содержащий линейный электропривод,состоящий из последовательно соединенных устройства числового и программного управления, первого цифроаналогового преобразователя, первого сумматора, первого пропорционально-интегрального регулятора, первого ограничителя напряжения, первого инерционного звена, первого узла токоограничения, формирователя задания фазных токов, первого релейного регулятора тока, первого усилителя мощности и линейного синхронного двигателя, выход
0 которого соединен с первым фазовращателем, последовательно соединенных преобразователя фаза - код, второго цифроаналогового преобразователя и выпрямителя, а также первого датчика тока,
5 входом соединенного с выходом первого усилителя мощности, а выходом - с вторым входом первого релейного регулятора тока, формирователя импульсных сигналов перемещения, входом соединенного с выходом
0 преобразователя фаза - код, выходом - с входом устройства числового программного управления, причем выход первого фазовращателя соединен с вторым входом формирователя задания фазных токов и входом
5 преобразователя фаза - код, выход выпрямителя соединен с вторым входом первого ограничителя напряжения, выход второго цифроаналогового преобразователя соединен с инверсным входом первого суммато0 ра, два асинхронных электропривода, каждый из которых состоит из последовательно соединенных формирователя амплитуды и фазы тока статора, формирователя задания фазных токов; релейного регулято5 ра тока, усилителя мощности и асинхронного двигателя, вал котор.ого соединен с фазовращателем и гибкой лентой с одной стороной подвижной части линейного синхронного двигателя, последовательно соеди0 ненных формирователя частоты скольжения асинхронного двигателя и сумматора частоты и формирователя импульсных сигналов, выход которого соединен с вторым входом формирователя задания фазных токов, фор5 мирователя частоты вращения асинхронного двигателя, входом соединенного с выходом фазовращателя, а выходом - с вторым входом сумматора частоты и формирователя импульсных сигналов, датчика тока,
0 входом соединенного с выходом усилителя мощности, а выходом - с вторым входом релейного регулятора тока, генератора опорной частоты, выходом соединенного с вторым входом формирователя амплитуды и
5 фазы тока статора, отличающийся тем, что, с целью повышения точности, он дополнительно содержит последовательно соеди- ненные второй сумматор, второй пропорционально-интегральный регулятор, второй ограничитель напряжения, второе
инерционное звено, второй узел, токоогра- ничения, первое нелинейное звено и третий сумматор, а также последовательно соединенные второе нелинейное звено и четвертый сумматор, первый и второй источники опорного напряжения, выходами соединенные соответственно с вторыми входами третьего и четвертого сумматоров, причем входы второго сумматора соединены с выходами первого сумматора и первого узла
токоограничения, вход второго нелинейного звена соединен с выходом второго узла токоограничения, выход каждого из третьего и четвертого сумматоров соединен с входами формирователя амплитуды и фазы тока статора и формирователя частоты скольжения одного из асинхронных электроприводов, при этом характеристики нелинейных элементов показаны на фиг.2,
/4
27
Фиг. 1
фиг.з
8ход
fipuffod
Фиг
S
Фиг 5
/////У/
/7777///
/7////
fpue.7
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1983 |
|
SU1112520A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
