Фиг.%
Изобретение относится к машиностроению, в частности к механизмам перемещения, преимущественно работающим в экологически чистых средах.
Известен механизм перемещения, содержащий подвижное звено с тремя взаимно перпендикулярными плоскими гранями, три однокоординатных движителя, выполненных в виде микрометрических винтов со сферическими торцами, и узел силового замыкания.
Однако данный механизм характеризуется малыми кинематическими возможностями и низкой точностью позиционирования.{
Наиболее близким к изобретению по технической сущности и достигаемому результату я в- ляется механизм перемещения, содержащий основание, подвижное звено с тремя взаимно перпендикулярными плоскими гранями, три однокоординатных движителя, каждый из которых выполнен в виде микрометрического винта со сферическим торцом, предназначенным для взаимодействия с одной из трех взаимно перпендикулярных граней подвижного звена, и узел силового замыкания, выполненный в виде трех плоских пружин со сферическими контактными кромками, расположенных во взаимно перпендикулярных плоскостях.
Недостатки известного устройства - малые кинематические возможности и низкая точность позиционирования, так как механизм обеспечивает только поступательное перемещение по трем координатным осям, при этом возможны незапланированные угловые перемещения, что снижает точность позиционирования.
Цель изобретения - расширение кинематических возможностей и повышение точности позиционирования.
Поставленная цель достигается тем, что механизм снабжен тремя дополнительными движителями, каждый из которых предназначен для взаимодействия с одной из трех взаимно перпендикулярных граней подвижного звена, а три прямые, соединяющие точки контакта каждого из основных и соответствующего «му дополнительного движителей с соответствующей гранью, скрещены.
На фиг. 1 показан механизм перемещения с движителями, расположенными на скрещивающихся под прямыми углами прямых; на фиг. 2 - разрез А-А на фиг. 1; на фиг.
3 - разрез Б-Б на фиг. 1; на фиг. 4 - механизм перемещения, вид в аксонометрии (узел силового замыкания условно не показан). Механизм перемещения (фиг. 1) содержит основание 1, подвижное звено 2 с шестью взаимно перпендикулярными плоскими гранями 3-8 (фиг, 1), шесть однокоординатных движителей 9-14, выполненных в виде микрометрических винтов со сферическими
торцами 15-2JO, узел силового замыкания, выполненный в виде трех плоских пружин 21, 22, 23 со сферическими контактными кромками 24, 25, 26, расположенных во взаимно перпендикулярных плоскостях. Точки
контакта каждого из основных и соответствующего ему дополнительного движителей с соответствующей гранью расположены на скрещивающихся прямых.
Механизм перемещения работает следующим образом.
При перемещении движителей 9-14, выполненных в виде микрометрических винтов со сферическими торцами 15-20,по- движное звено 2 перемещается по трем линейным и трем угловым координатам, т.е. по шести степеням подвижности.
Применение предложенного устройства позволяет расширить кинематические возможности перемещения и повысить точность позиционирования.
Формула изобретения Механизм перемещения, содержащий основание, подвижное звено с тремя взаимно перпендикулярными плоскими гранями,
три однокоординатных движителя, каждый из которых выполнен в виде микрометрического винта со сферическим торцом, предназначенным для взаимодействия с одной из трех взаимно перпендикулярных граней
подвижного звена, и узел силового замыкания, выполненный в виде трех плоских пружин со сферическими контактными кромками, расположенных во взаимно перпендикулярных плоскостях, отличающ и и с я тем, что, с целью расширения кинематических возможностей и повышения точности позиционирования, механизм снабжен тремя дополнительными движителями, каждый из которых предназначен для
взаимодействия с одной из трех взаимно перпендикулярных -граней подвижного звена, а три прямые, соединяющие°точки контакта каждого из основных и соответствующего ему дополнительного движителей
с соответствующей гранью,скрещены.
Фиг.Г
Д-А
Фиг. 2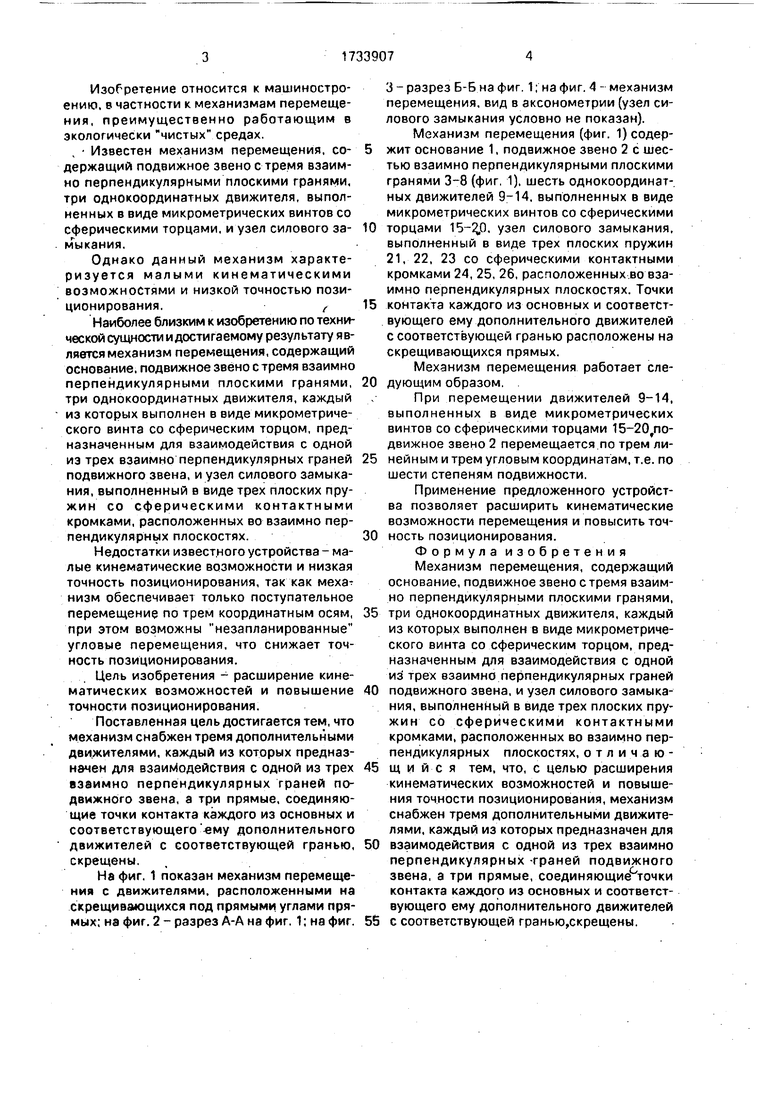
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкоординатный механизм поступательного перемещения | 1977 |
|
SU682751A1 |
| Микроманипулятор для сферических объектов | 1986 |
|
SU1366385A1 |
| УЗЕЛ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2631128C1 |
| Механизм прецизионного позиционирования для изготовления высокоточных оптических устройств | 2021 |
|
RU2771148C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| Пространственный механизм | 1989 |
|
SU1703443A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СООСНОСТИ ДЕТАЛЕЙ, ЦЕНТРОИСКАТЕЛЬ И МЕХАНИЗМ НАВЕДЕНИЯ | 1995 |
|
RU2107259C1 |
| БЛОК СВЕТОДЕЛИТЕЛЬНОЙ ПРИЗМЫ И ПРИБОРА С ЗАРЯДОВОЙ СВЯЗЬЮ И СПОСОБ СБОРКИ ПОД ЮСТИРОВКУ ЭТОГО БЛОКА | 1997 |
|
RU2120196C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| МИКРОМАНИПУЛЯТОР ДЛЯ ПОЗИЦИОНИРОВАНИЯ ЗОНДА | 1992 |
|
RU2056666C1 |
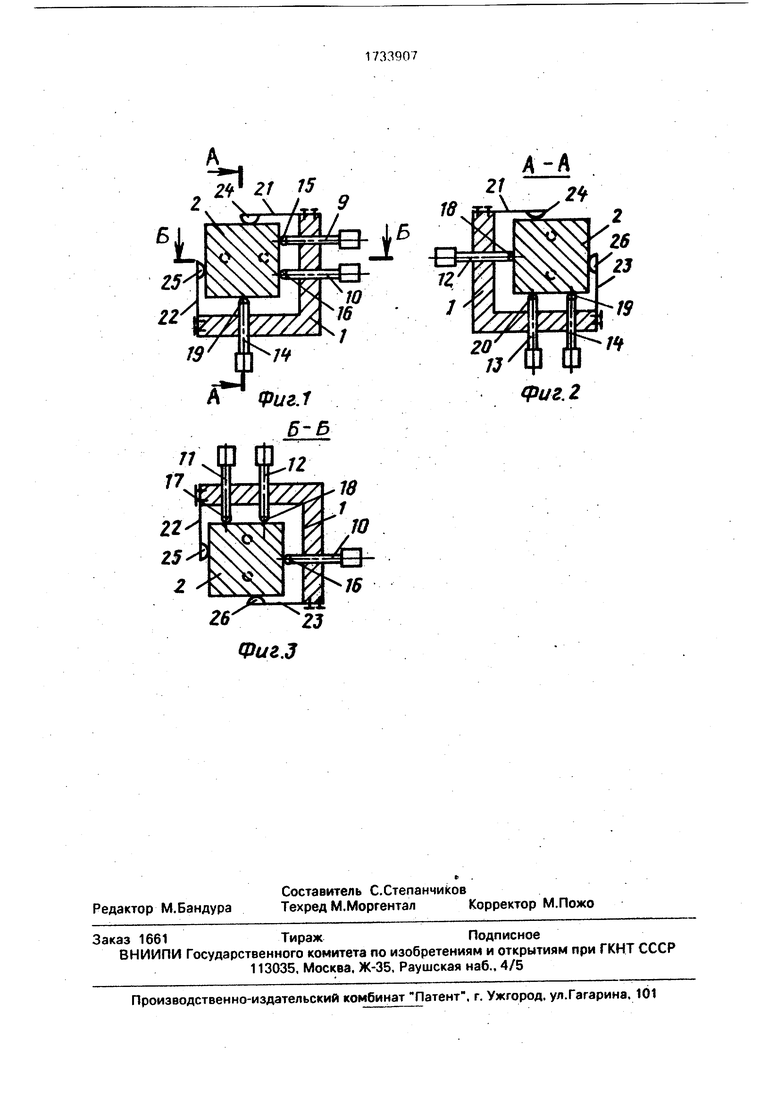
Изобретение относится к машиностроению и может быть использовано в механизмах, преимущественно работающих в экологически чистых средах. Цель изобретения - расширение кинематических возможностей и повышение точности позиционирования. С этой целью механизм снабжен дополнительными движителями 12, 13 и 14, которые наряду с основными движителями 9, 10 и 11 контактируют с гранями 3-8 подвижного звена 2. При перемещении движителей 9-14 вдоль своих осей подвижное звено перемещается по трем линейным и трем угловым координатам с любым соотношением величин этих перемещений. 4 ил. 76 J 4 11 t I / s 11 VJ СА Ы Ч) О VI 19 14
6-5
11
| ВОДОГРЕЙНЫЙ КОТЕЛ | 0 |
|
SU340845A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Трехкоординатный механизм поступательного перемещения | 1977 |
|
SU682751A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
