Изобретение относится к дезактивации и рекультивации грунта и почвы при их загрязнении радиоактивными элементами.
Известно, что для дезактивации необходимо сначала осуществить радиационную разведку, чтобы обнаружить наличие радиоактивного загрязнения на поверхности, а затем выполнять действия по его удалению и проконтролировать качество работ. Это является одним из основных вопросов гражданской обороны по защите населения от ядерных взрывов. Такой способ может быть применен при обеззараживании территории при авариях на АЭС, когда в окружающее пространство выбрасываются радиоактивные элементы, загрязняющие не только сооружения, грунт, но и сельскохозяйственные угодия, включая и почвенный слой. С течением времени, путем воздействия атмосферных факторов радиоактивные элементы могут проникать на глубину и длительное время, радиоактивные элементы с большим периодом полураспада (137Cs, 90Sr, 238Рu, 239Рu), будут создавать радиационную опасность не только прямым воздействием излучения, но и через сельскохозяйственные продукты.
Способы дезактивации территории, подвергнутой радиоактивному заражению, заключаются в основном в выполнении радиационной разведки, снятии (срезании) зараженного слоя грунта толщиной 5-10 см дорожными машинами (бульдозерами, грейдерами) [1] .
Практическое использование такого способа с известными устройствами не позволяет достаточно эффективно вести очистку и транспортировку грунта на больших площадях из-за отсутствия детальной информации о геометрических размерах загрязнения, включая и его толщину. Оптимальная сеть наблюдения при картографировании бета-гамма-поля не исключает значительных пространственных погрешностей, когда можно снять заведомо загрязненный грунт или почву и, смешав его с загрязненным, утратить, но можно оставить на местности и часть загрязненного грунта или почвы и тем самым не обеспечивать полной радиационной безопасности.
Из известных устройств, наиболее близким к изобретению является скрепер, содержащий базовую машину с ходовой тележкой, тяговую раму с упряжной рамой, упряжными балками, передним и задним ковшами со срезающими ножами, гидросистему открывания заслонок, спуска и подъема ковшей.
Такой скрепер не позволяет дифференцированно срезать загрязненный слой. Контроль качества очистки при этом должен выполняться дозиметрической службой, которая будет подвергаться излишнему облучению.
Предлагаемый способ заключается в том, что радиоактивную загрязненность грунта оценивают по интегральной активности бета-излучения и интенсивности гамма-излучения непосредственно перед ковшом скрепера и только в пределах его ширины захвата, а по спектральному отношению интенсивности гамма-излучения в области наиболее жесткой линии и комптоновского рассеяния приблизительно определяют толщину слоя загрязнения исходя из экспериментально установленной зависимости между величиной спектрального отношения и действительной толщиной слоя загрязнения; качество очистки грунта оценивают по измерениям активности бета-излучения и интенсивности гамма-излучения сразу после ножей переднего ковша и при обнаружении остающегося загрязнения ковш в большей степени заглубляется до полного удаления загрязнения, а часть загрязненного грунта, оказавшаяся за ножом и не попавшая в передний ковш, подчищается задним ковшом, управление которым осуществляется по сигналам от предыдущего датчика, также по величине активности бета- и интенсивности гамма-излучения и спектрального отношения. Контроль качества очистки задним ковшом производится датчиком, установленным за ножом заднего ковша, и если при полном заглублении заднего ковша остается загрязненность, то на местности пропахивается борозда-метка, сохраняющаяся длительное время, чтобы после очистки по одной сети маршрутов оставшуюся загрязненность подчистить по другой более оптимальной сети исходя из расположения на местности меток-борозд.
Устройство для осуществления способа очистки грунта от радиоактивного загрязнения содержит измерительные бета-гамма-датчики в экранах-коллиматорах, формирующих зону их чувствительности в пределах ширины захвата ковша, при этом один из датчиков укреплен впереди между двумя подпружиненными катками на упряжных балках на расстоянии, обеспечивающем срабатывание спуска-подъема переднего ковша, а два других датчика закреплены на днище переднего и заднего ковшей на расстоянии от ножей, включающем регистрацию мешающего излучения.
Для ковшей с секционированными ножами измерительные датчики разбиваются на отдельные, автономные части с соответствующими экранами-коллиматорами, формирующими их зоны чувствительности в пределах ширины каждой секции ножа.
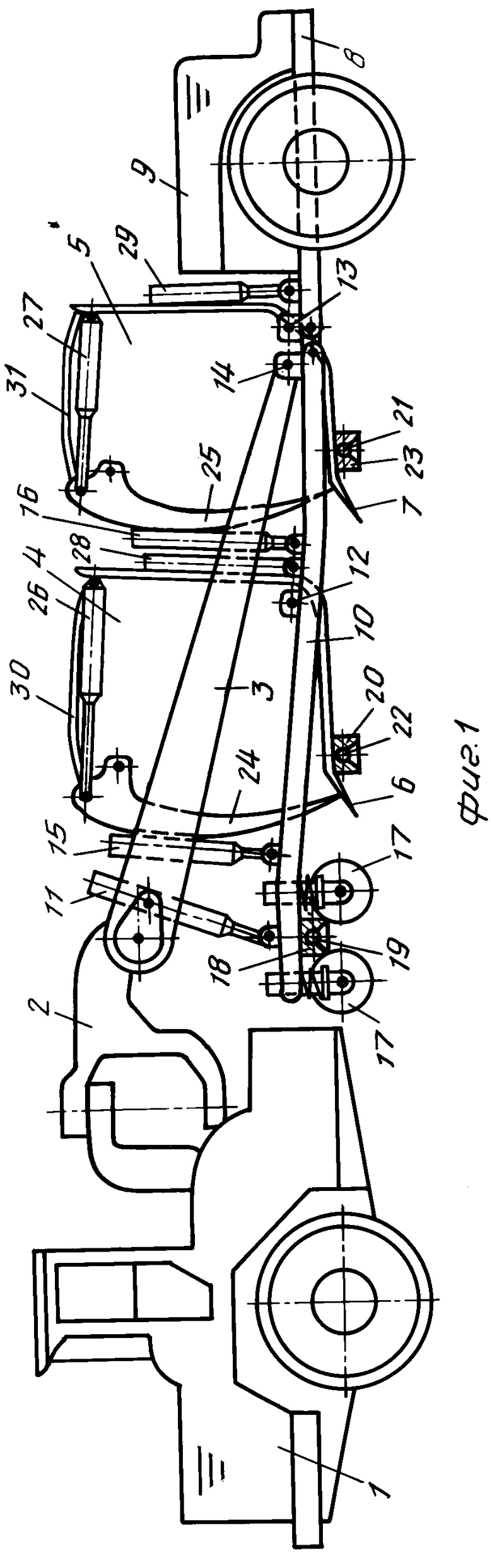
На фиг. 1, 2 и 3 схематически показано устройство для очистки грунта от радиоактивных загрязнений и принцип его работы.
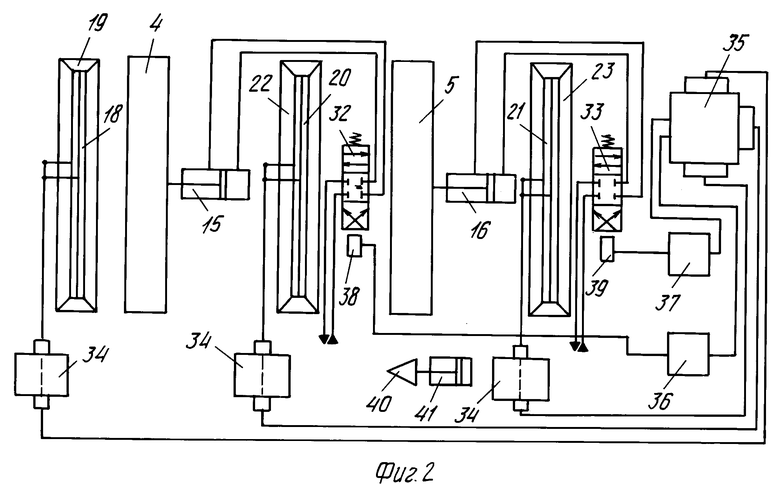
Устройство содержит базовую машину 1, тяговую раму 2 с упряжными тягами 3, с передним 4 и задним 5 ковшами, режущими ножами 6 и 7. Задняя рама 8 на ходовой тележке 9 с упряжными балками 10, шарнирно подсоединенными к гидроцилиндру (ГЦ) 11. Ковши 4 и 5 через шарниры 12 и 13 также укреплены на управляющих балках 10. Упряжная рама 3 шарниром 14 связана с упряжными балками 10, там же шарнирами связаны и ГЦ 15 и 16, поджимающие и опускающие ковши 4 и 5. Впереди перед ковшом 4 на упряжных балках 10 закреплены два подпружиненных катка 17, между которыми установлены бета-гамма-датчики 18 в защитных экранах-коллиматорах 19. На днищах ковшей 4 и 5, после ножей 6 и 7 закреплены измерительные бета-гамма-датчики 20 и 21 в экранах-коллиматорах 22 и 23 соответственно. Ковши 4 и 5 закрываются спереди заслонками 24 и 25 с помощью ГЦ 26 и 27. На задней стенке ковшей 4 и 5 закреплены ГЦ 28 и 29, соединенные шарнирно с упряжными балками 10. Сверху ковши закрываются крышками 30 и 31. Рабочая жидкость в ГЦ 15 и 16 поступает через четырехлинейные трехпозиционные гидрораспределители (ГР) 32 и 33, управляемые сигналами с измерительных датчиков 18, 20 и 21 через формирователи-селекторы 34, процессор 35, контроллеры 36 и 37, путем включения электромагнитов (ЭМ) 38 и 39. Сигнал с датчика 21 может управлять заглублением двух рыхлителей-отметчиков 40 через ГЦ 41.
Предлагаемое устройство работает следующим образом. На территории, подвергнутой радиоактивному загрязнению, выбирают схему маршрутов движения, ориентируя их окрест простирания загрязненности. Въезжая на начало маршрута, с помощью ГЦ 11 упряжные балки 10 с ковшами 4 и 5 опускают так, чтобы катки 17 легли на поверхность грунта, обеспечивая тем самым постоянство геометрических условий измерений, постоянство плотности верхнего слоя измеряемой поверхности, что особенно важно при оценке бета-активности. Кроме того, уплотненный верхний слой уменьшит пылевыделение при его съеме и обеспечит при необходимости срезание тонкой загрязненной стружки. Все три измерительных датчика 18, 20 и 21 ведут регистрацию бета-гамма-излучения, которое в виде электрических импульсов через отдельные формирователи-селекторы для каждого датчика, поступают в процессор 35, где измеренная частота следования импульсов от датчика 18 сравнивается с предварительно занесенными фоновыми значениями. Если они не различаются в пределах погрешности измерений, ковш 4 не заглубляется, устройство перемещается по маpшруту, а показания с датчиков 20, 21 в процессе 35 сравниваются как контрольные для датчиков 18 с учетом скорости движения.
Когда измеренная частота будет превышать фоновую больше утроенной величины погрешности измерений или по бета-, или по гамма-, или по тому и другому вместе взятому излучению, с процессора 35 через контроллер 36 вырабатывается сигнал на ЭМ 38, сдвигающий золотник ГР 32, который подсоединяет полости ГЦ 15 к гидросети так, чтобы ковш 4 начал опускаться, углубляясь в грунт, но предварительно по сигналу с процессора 35 с помощью ГЦ 26 открывается заслонка 24. В процессоре 35 вычисляется значение спектрального отношения по введенной в память процессора экспериментальной зависимости оценивают приблизительно толщину слоя загрязнения. В результате здесь же вырабатывается сигнал, ограничивающий глубину погружения ковша 4 в грунт.
По частоте импульсов с датчика 20 в процессоре 35 оценивают величину оставшейся загрязненности, если она отсутствует, то по информации с датчика 18 через процессор 35 ведется съем верхнего загрязненного слоя, но постоянно контролируя его отсутствие после ковша 4. Если по информации с датчика 20 обнаруживается загрязненность, то вырабатывается сигнал на дальнейшее углубление ковша 4, а другой сигнал через контроллер 37, ЭИ 39, ГР 33, с помощью ГЦ 16, опускает ковш 5 на толщину слоя загрязнения, оцененную приблизительно по спектральному отношению с датчика 20, но предварительно ГЦ 27 открывает заслонку 25.
Контроль качества подчистки ковшом 5 осуществляется датчиком 21, функционирующим со всей аппаратурой, как и датчик 20. Здесь возможен случай, когда после ковша 5 также частично остается загрязнение, обнаруженное уже за углубленным ковшом 5, его невозможно подобрать и поэтому в процессоре 35 вырабатывается сигнал, управляющий заглублением двух рыхлителей-отметчиков 40 через ГЦ 41, пропахивающих на местности с двух сторон от скрепера метки-борозды. Водитель скрепера после очистки всей площади по одной сети мог проложить дополнительные подчищающие маршруты. Все устройство работает в такой же последовательности, как и при первоначальной очистке.
Когда на обеззараживаемой территории ожидается "пятнистое" загрязнение с размерами, значительно меньшими ширины захвата ковша, можно использовать ковши с секционными ножами, индивидуально управляемые соответствующими ГР и ГЦ. В этом случае бета-гамма-датчики также разделены с формированием отдельной зоны чувствительности в пределах ширины каждой секции ножа. Информация с каждого такого датчика поступает индивидуально через свой формирователь-селектор на процессор, где вырабатываются сигналы, управляющие спуском-подъемом соответствующих ножей. Спуск ковшей производится по интегральному сигналу с датчиков перед каждым ковшом.
После заполнения ковшей 4 и 5 они поднимаются ГЦ 15 и 16, закрываются заслонки 24 и 25, поднимаются упряжные балки 10 и с помощью базовой машины 1 загрязненный грунт транспортируется на пункт захоронения или дезактивации. Там машина 1 заезжает на приемные спаренные бункеры, где одновременно открываются заслонки 24, 25, ГЦ 15, 16 опускают ковши 4, 5, дополнительно наклоняя их ГЦ 28, 29 и с помощью установленных у бункеров вибраторов очищают ковш от загрязненного грунта. В такой последовательности обрабатывается вся территория участка, подлежащего очистке.
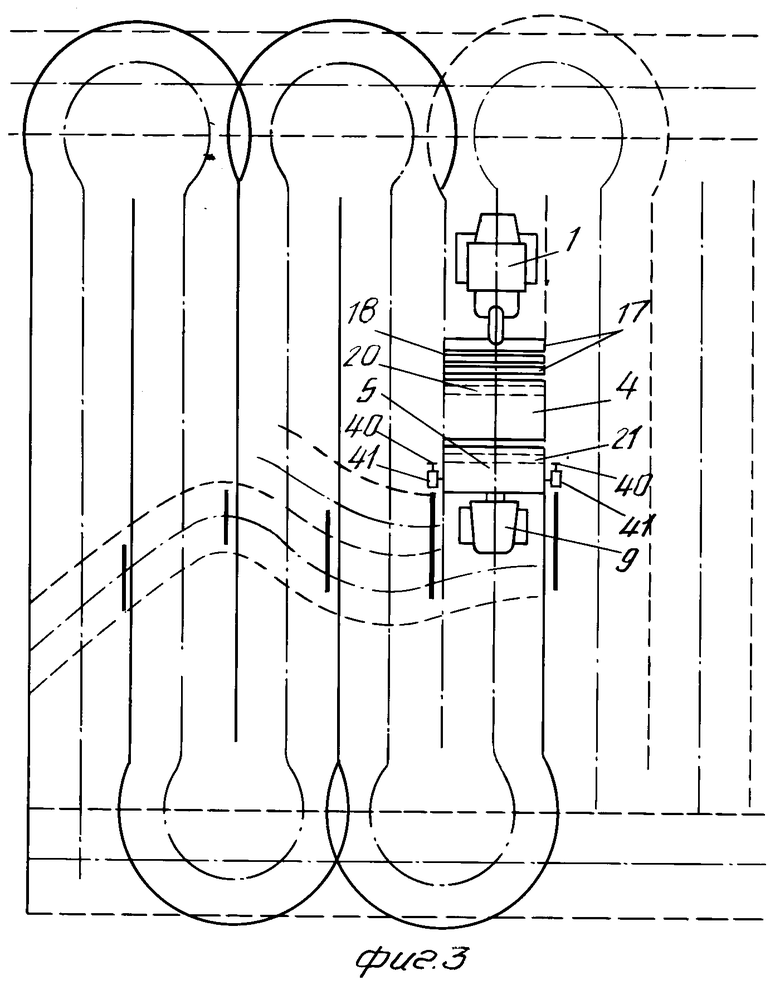
На фиг. 3 показана схема маршрутов при наличии дополнительных подчищающих заездов по выделенным на местности остаткам загрязнений.
Использование изобретения уменьшит облучение персонала дозиметрической службы при пешеходном картировании загрязненных участков. Для жителей, проживающих на территории зараженных районов, существенно уменьшится радиационная опасность. Сельскохозяйственные угодия, где удален загрязненный слой и в оставшемся почвенном слое агрохимическая структура не нарушена, могут быть достаточно оперативно введены в севооборот для получения сельхозпродукции. (56) 1. Егоров П. Т. Гражданская оборона. Изд-во "Высшая школа", М. , 1977, с. 211.
2. Авторское свидетельство СССР N 1313963, кл. Е 02 F 3/64, 1987.
Использование: дезактивация зараженных радиоактивными элементами сельскохозяйственных угодий после крупных аварий на АЭС. Сущность изобретения: способ заключается в том, что, радиоактивность на местности оценивают по интегральной активности бета-излучения и интенсивности гамма-излучения непосредственно перед ковшом скрепера в пределах его ширины захвата, а по спектральному отношению интенсивности гамма-излучения в области наиболее жесткой линии и комптоновского рассеяния приблизительно определяют толщину слоя загрязнения, сравнивая с экспериментальной зависимостью. Качество очистки загрязнения оценивают по результатам измерений активности бета- и интенсивности гамма-излучения сразу после переднего ковша. Если обнаруживают оставшуюся загрязненность, то передний ковш еще больше заглубляют, а задний ковш подчищает загрязненность и контролирует качество очистки. Когда при полном заглублении заднего ковша на поверхности почвы остается загрязнение, на местности пропахивают борозду-метку, сохраняющуюся длительное время, чтобы после завершения очистки по одной сети маршрутов, оставшуюся загрязненность подчистить по другой, более оптимальной сети, исходя из расположения на местности борозд-меток. Предлагается также устройство для реализации способа, которое содержит три измерительных бета-гамма-датчика в экранах-коллиматорах, формирующих зону их чувствительности в пределах ширины захвата ковша. Один из датчиков укреплен впереди, на упряжных балках, между двумя подпружиненными катками на расстоянии, обеспечивающем срабатывание спуска-подъема переднего ковша, два других датчика закреплены на днище переднего и заднего ковшей на расстоянии от ножей, исключающем регистрацию мешающего излучения. 2 с. и 1 з. п. ф-лы, 3 ил.
