Изобретение относится к техническим средствам освоения глубоководных участков Мирового океана, а именно к технологии и средствам подъема подводных объектов, и может быть использовано как способ и техническое средство для страхования подводного объекта при его аварии, связанной с невозможностью его штатного подъема на поверхность моря из-за выхода из строя балластной, уравнительной или других функциональных бортовых систем.
Известны способ подъема подводного объекта путем прикрепления конца каната (фала) с подводного объекта к подъемному средству и вытягивания сначала каната, а затем с его помощью силового кабеля, расположеного на объекте с возможностью его свободного разматывания под воздействием натяжения каната, и устройство, содержащее буй, установленный на подводном объекте посредством держателя с приводом его раскрытия, и канат положительной плавучести, который прикреплен свободным концом к бую, а другим связан с подводным объектом и уложен на нем таким образом, что при отделении буя от подводного объекта он автоматически разматывается, не запутываясь и не образуя перехлестов, а также надводное судно с подъемной лебедкой [2] .
Приведенные в качестве прототипов способ и устройство ограничены в своем применении глубиной, например для подводных аппаратов "Пайсис" предельная рабочая глубина описанных страховочных средств не превышает 1500 м, и особенно подводным весом объекта из-за необходимости снабжения объекта подъемным канатом (силовым кабелем) диаметром, соответствующим по прочности подводному весу объекта. Это приводит с ростом рабочей глубины и подводного веса объекта к значительному возрастанию объема каната в связи с соответствующим увеличением его длины и диаметра. Кроме того, увеличение диаметра связано с повышением жесткости каната и увеличением минимально допустимого радиуса его изгиба, что в совокупности вызывает трудности в укладке каната, например, в бухту или намотке на барабан и приводит к увеличению габаритов бухты, барабана, контейнера и т. п.
При глубинах порядка 2500-5000 м и более, на которых в основном должна проводиться добыча полезных ископаемых (железомарганцевых конкреций, полиметаллических сульфидов и др. ), особенно при применении тяжелых добычных машин (50-100 т и более), известные способ и устройство для подъема подводного объекта из-за значительного увеличения объема каната (габаритов бухты, барабана, контейнера и т. п. ), располагаемого непосредственно на борту объекта, становятся неэффективными: усложняются компоновка и центровка подводного объекта, значительно увеличиваются его габариты и масса, снижаются его функциональные параметры и др.
Цель изобретения - расширение эксплуатационных возможностей.
В способе это достигается тем, что канат, располагаемый на борту подводного объекта, запасовывают через закрепленный на подводном объекте блок и поднимают на надводное судно также и другой конец упомянутого каната, соединяют один из его поднятых концов с судовой лебедкой, а к другому прикрепляют конец подъемного каната и протягивают упомянутый канат с помощью судовой лебедки до запасовки подъемного каната через указанный блок и последующего подъема его конца на судно.
В реализующем этот способ устройстве указанная цель достигается тем, что оно снабжено блоком, который смонтирован на подводном объекте, дополнительным буем, прикрепленным к другому концу располагаемого на борту подводного объекта каната, и дополнительным держателем с приводом его раскрытия, посредством которого дополнительный буй установлен на подводном объекте. При этом в указанный канат в своей средней части запасован через блок и его конец со стороны дополнительного буя также уложен с возможностью свободного разматывания под воздействием всплывающего буя после срабатывания привода раскрытия держателя.
Оно снабжено вертлюгом, посредством которого упомянутый блок связан с корпусом подводного объекта, причем корпуса блока и вертлюга связаны шарниром, ось которого перпендикулярна оси вертлюга.
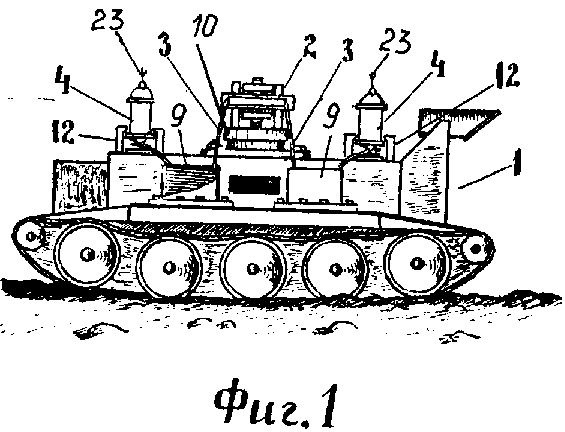
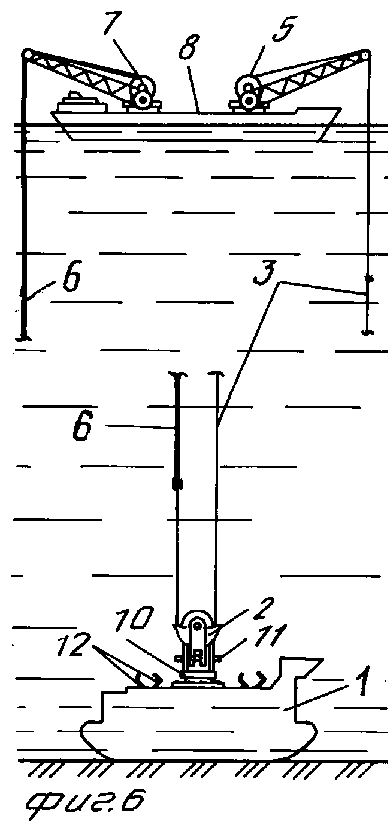
На фиг. 1 показан общий вид подводной части устройства с вертикальной компоновкой буев на подводном объекте (блок находится в горизонтальном положении); на фиг. 2 4- общий вид подводной части устройства с горизонтальной компоновкой буев на подводном объекте; на фиг. 3 - вид спереди на подводный объект, показанный на фиг. 2; на фиг. 4 - пример установки буя при его горизонтальной компоновке; на фиг. 5 - момент вслытия буев с концами каната, располагаемого на подводном объекте, на поверхность океана и подачи ими сигналов; на фиг. 6 - операция протягивания подъемного каната через блок с помощью каната, располагаемого на объекте; на фиг. 7 - операция подъема подводного объекта на поверхность подъемным канатом; на фиг. 8 - пример принципиальной схемы управления приводом держателя буя.
Способ заключается в том, что на подводном объекте 1 (фиг. 1-3) запасовывают через блок 2 располагаемый на объекте 1 канат 3, имеющий положительную плавучесть. При необходимости осуществления операции подъема подводного объекта 1 на поверхность океана поднимают на поверхность поочередно или одновременно оба конца каната 3, например, с помощью прикрепленных к ним буев 4 (фиг. 5). При этом буи 4 устанавливают на борту подводного объекта с возможностью их управляемого отделения, например, при аварии или окончании работ. На поверхности буи 4 подают сигналы, по которым осуществляется их поиск и обнаружение. Далее один из концов каната 3 соединяют с судовой лебедкой 5 (фиг. 6), а к другому прикрепляют конец подъемного каната 6, например, намотанного предварительно на барабан другой судовой лебедбки 7. Затем последовательно протягивают канат 3 и соединенный с ним подъемный канат 6 через блок 2 до момента подъема последнего на надводное судно 8, например, наматывая конец каната 3 на барабан лебедки 5 и синхронно стравливая подъемный канат 6 с лебедки 7. При этом судно 8 оказывается связанным с подводным объектом 1 подъемным канатом 6, с помощью которого известными средствами осуществляют подъем подводного объекта на поверхность океана. В связи с тем, что в данном способе подъемный канат 6 заводят с судна 8 на подводный объект 1 через блок 2, тяговое усилие можно создавать на подводный объект 1 как за одну ветвь подъемного канала 6 (для этого свободный конец подъемного каната 6 снабжают ограничителем, препятствующим его прохождению через блок 2, и сбрасывают за борт судна), так и за две, оставляя свободный конец на судне, закрепленным, например, на лебедке 7 (1-й вариант в силу его очевидности, простоты и известности на фиг. не показан, а 2-й показан на фиг. 7). Выбор вариантов зависит от подводного веса поднимаемого объекта 1, а также прочности и длины имеющегося в наличии подъемного каната 6. 1-й вариант проще, дешевле, требует меньшего времени на проведение операции запасовки подъемного каната, а 2-й обеспечивает более широкие возможности по условиям эксплуатации: глубине океана, подводного веса поднимаемого объекта, надежности и т. п.
Устройство, реализующее описанный способ, содержит канат 3 положительной плавучести (например филлистрановый), расположенный на борту подводного объекта 1, буи 4, установленные на корпусе объекта 1 и присоединенные к концам каната 3, блок 2, прикрепленный к силовому элементу корпуса подводного объекта 1 и через который запасован канат 3, а также надводное судно 8 с подъемной 5 и дополнительной 7 лебедками.
Блок 2 условно разделяет канат 3 на две равные части, каждая из которых по длине соответствует рабочей глубине подводного объекта 1 и уложена таким образом, например, в контейнер 9 (или намотана на вращающийся барабан), что обеспечивает свободное разматывание конца каната 3 под воздействием всплывающего буя 4 после его отделения от подводного объекта 1).
Для улучшения условий заведения подъемного каната 6 (например, выполненного из арамидного волокна тварона или армированного кевларом) на подводный объект 1 с надводного судна 8 и последующего подъема подводного объекта 1 на поверхность океана блок 2 может быть соединен с силовым элементом корпуса подводного объекта 1 через вертлюг 10, а корпуса вертлюга 8 и блока 2 соединены шарниром 11, например, в виде поворотной оси. Это позволяет блоку 2 в статическом состоянии находиться в сложенном положении (фиг. 1-3), а при заведении подъемного каната 6 и подъеме подводного объекта 1 занимать вертикальное положение (фиг. 6 и 7).
Буи 4 установлены на борту объекта 1 в вертикальном (фиг. 1), горизонтальном (фиг. 2 и 3) либо в иных положениях и зафиксированы управляемыми держателями 12. На фиг. 4 показан один из примеров конструктивного исполнения держателя 12 для буя 4 при горизонтальной компоновке. Буй 4 лежит на заднем и переднем ложементах 13 и удерживается профилированными задним и передним рычагами 14, соединенными на концах перемычками и образующими при этом четырехстороннюю раму, установленную на поворотной оси 15. Для отделения буя 4 от подводного объекта 1 держатель 12, в данном примере выполненный в виде рамы, снабжен приводом 16 для его раскрытия. Привод 16 может быть выполнен, например, в виде соленоида 17, втягиваемый сердечник 18 которого является упором, фиксирующим раму держателя 12 в рабочем положении. Управление держателем 12, т. е. обеспечение срабатывания сердечника 18 соленоида 17, осуществляется автоматически, например, при аварии, вызывающей обесточивание системы электроснабжения, либо по сигналу с судна 8 (фиг. 8). При обесточивании (напряжение V = 0) или подаче гидроакустического управляющего сигнала через приемник 19 срабатывает реле 20 и замыкает контакты цепи автономного источника 21 постоянного тока, например, погружного аккумулятора. При этом срабатывает соленоид 17, втягивая сердечник 18, подпружиненный пружиной 22, внутрь корпуса соленоида 17, освобождая рычаги 14 держателя 12. Буи 4 отделяются от подводного объекта.
При всплытии буи 4 поднимают концы каната 3 на поверхность океана (фиг. 5). На поверхности срабатывают сигнальные системы 23. После обнаружения буев 4 один из концов каната 3 заводят на барабан судовой лебедки 5, а другой присоединяют к концу подъемного каната 6, например, предварительно намотанного на барабан дополнительной судовой лебедки 7. наматывая на барабан лебедки 5 конец каната 3 и одновременно стравливая подъемный канат 6 с барабана лебедки 7 протягивают канат 6 (запасовывают) через блок 2 на подводном объекте 1 до момента подъема его на судно 8. При этом, как указывалось, могут быть в зависимости от условий эксплуатации использованы два варианта подъема подводного объекта 1 на поверхность океана: за одну или обе ветви каната.
В первом варианте свободный конец подъемного каната 6 снабжают ограничителем в виде утолщения, препятствующего прохождению его через блок 2. При протягивании подъемного каната 6 и выборе всей его длины, соответствующей глубине океана в районе работ, его конец с ограничителем сбрасывают за борт судна 8 и продолжают протягивание до момента появления на судне 8 узла крепления каната 3 с подъемным канатом 6 и стопорения ограничителя, которым снабжен другой конец подъемного каната 6, в блоке 2. Последующий подъем подводного объекта 1 осуществляют любыми известными техническими средствами, например, с использованием в качестве судовой лебедки 5 транзитной лебедки с вьюшкой.
Во втором варианте свободный конец подъемного каната 6 после запасовки его через блок 2 остается на судне 8. При этом подъемный канат 6, запасованный через блок 2, образует прост ранственную петлю, соединяющую надводное судно 8 с подводным объектом 1. В этом случае подъем подводного объекта 1 можно осуществить, например, выбирая оба конца подъемного каната 6 лебедками 5 и 7 или один из концов при стопорении соответствующей лебедки (либо просто закреплением одного из концов каната 6): подводный объект 1 за счет блока 2 всегда находится в нижней части образованной подъемным канатом 6 петли (фиг. 7).
Соединение блока 2 с корпусом подводного объекта 1 через вертлюг 10 и шарнир 11 дает возможность устанавливаться (по углам поворота в горизонтальной плоскости и наклона к ней) блоку 2 под воздействием тягового каната 6 соответственно пространственному положению последнего, что облегчает условия запасовки тягового каната 6 через блок 2. Кроме того, вертлюг 10 при подъеме подводного объекта 1 препятствует перекручиванию ветвей подъемного каната 6.
Таким образом, суть изобретения заключается в обеспечении возможности использования на подводном объекте для связи с надводным судном относительно тонкого каната, с помощью которого непосредственно поднять объект из-за его подводного веса, значительно превышающего разрывное усилие каната, невозможно (если использование более прочного каната нецелесообразно из-за увеличения его диаметра и соответственно объема, снижающего тактико-технические характеристики подводного объекта), и установлении силовой связи судна с подводным объектом через подъемный канат путем использовании каната, располагаемого на подводном объекте, как проводника для протягивания подъемного каната через блок или рым, закрепленные на объекте.
Внедрение предлагаемого способа и реализующего его устройства в соответствии с поставленной целью по сравнению с известными позволит при незначительных затратах относительно стоимости подводных объектов: увеличить рабочую глубину и подводный вес подводных объектов, при которых они оперативно могут быть подняты на поверхность океана; практически исключить при использовании устройства в качестве страховочного средства случаи потери дорогостоящего глубоководного оборудования (подводных аппаратов, добычных машин и т. п. ); объединить в себе функции штатного и страховочного подъемного средства. (56) 1. Патент Франции N 2372074, кл. В 63 С 7/00, 1976.
2. Сагалевич А. М. Океанология и подводные обитаемые аппараты, М. : 1987, с. 76 и 77.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУЙКОВАЯ СИСТЕМА | 1991 |
|
RU2029708C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| УСТАНОВКА ДЛЯ ПОДЪЕМА ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА ОКЕАНА | 1989 |
|
SU1750304A3 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556041C1 |
| ПОДВОДНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2003 |
|
RU2302972C2 |
| Рабочее оборудование экскаватора-драглайна | 1985 |
|
SU1265255A1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2000 |
|
RU2205769C2 |
| Спуско-подъемное устройство | 2018 |
|
RU2735444C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2114756C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |






Использование: в технологии и технике подъема подводных объектов. Сущность: располагаемый на подводном объекте канат положительной плавучести предварительно (до погружения) запасовывают через закрепленный на подводном объекте блок и поднимают на надводное судно оба конца каната, затем прикрепляют к одному из поднятых концов подъмный канат и протягивают канат до запасовки подъемного каната через блок и подъема его конца на судно. Тяговое усилие для подъема подводного объекта на поверхность в зависимости от условий эксплуатации создают за одну или две ветви тягового каната известными способами и средствами. Устройство, реализующее предложенный способ, для подъема концов каната на поверхность снабжено прикрепленными к ним буями, каждый из которых установлен на подводном объекте посредством управляемого держателя с приводом его раскрытия. Канат запасован через блок в своей средней части, и оба его конца относительно блока имеют одинаковую длину, соответсвующую рабочей глубине подводного объекта, и уложены с возможностью свободного разматывания под воздействием всплывающих буев после раскрытия их держателей 12. 2 с. и 1 з. п. ф-лы, 8 ил.
