Изобретение относится к судовой технике, а именно к судовым спускоподъемным устройствам (СПУ).
Известны СПУ, содержащие судовую лебедку, на барабан которой запасован верхний конец кабель-троса, нижний конец которого через гермоввод соединен с подводным объектом, а также устройство управления приводом лебедки, к входам которого подключены выходы задатчика, измерительных преобразователей скорости качки грузового блока лебедки и глубины погружения спускаемого подводного объекта [1, 2]. В таких СПУ управление скоростью судовой лебедки в режимах спуска и подъема осуществляется как по заведенному с пульта управления значению, так и по возмущению - по скорости качки грузового блока. В режиме стабилизации глубины погружения опускаемого подводного объекта управления приводом лебедки осуществляется по возмущению - по скорости качки грузового блока и по отклонению глубины погружения опускаемого объекта. Эти устройства обеспечивают высокую точность управления глубиной погружения и практически полное устранение влияния качки судна-носителя.
Недостатками устройства являются: низкое быстродействие контура управления по отклонению глубины погружения, так как для обеспечения устойчивости частота среза этого контура должна быть меньше частоты первого резонансного максимума звена кабель-трос - подводный объект, которая составляет 0,1 Гц и менее при длине кабель-троса в несколько километров; резкое сокращение срока службы кабель-троса, что вызвано его изгибными деформациями при сматывании-наматывании на барабан лебедки в процессе компенсации влияния качки судна-носителя под действием управления по возмущению. Кабель-трос допускает всего 1000 - 2000 изгибов при прохождении через блоки. Этот ресурс может быть израсходован за несколько часов непрерывной работы лебедки.
Наиболее близким по технической сущности к заявленному СПУ является выбранное в качестве прототипа СПУ, содержащее установленные на судне грузовую и вспомогательную лебедки, на которые заведены концы гибкой связи, соединяющей судно с опускаемым с него объектом, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу привода грузовой лебедки, и второй управляющий блок, первый вход которого подключен к второму задатчику, а выход - к управляющему входу привода вспомогательной лебедки [3].
В этом СПУ вспомогательная лебедка так же, как и грузовая, установлена на судне. Гибкая связь представляет собой единый канат, охватывающий подвеску, с помощью которой подвешивается опускаемый объект. В канатную проводку включены амортизаторы, соединенные с переключателем привода вспомогательной лебедки, имеющей самотормозящийся редуктор. Под действием веса опускаемого объекта амортизаторы находятся в сжатом состоянии. При этом привод вспомогательной лебедки отключен, ее барабан неподвижен, спуск или подъем опускаемого объекта производится с помощью грузовой лебедки. При нахождении опускаемого объекта на взволнованной поверхности воды под действием качки судна и опускаемого объекта возможны промежутки времени, в течение которых ослабляется натяжение каната, что вызывает растяжение амортизаторов и включение привода вспомогательной лебедки. Последняя выбирает слабину каната, предотвращая тем самым рывки в канате.
Недостаток этого СПУ заключается в том, что при нахождении опускаемого объекта на глубине ветви каната могут скручиваться между собой и запутываться. Вторым недостатком такого СПУ является то, что оно не пригодно для стабилизации глубины погружения опускаемого объекта даже на той малой глубине, на которой еще не происходит запутывание каната, а также для длительного удержания опускаемого объекта на поверхности воды в условиях морского волнения. В автоматическом режиме работы вспомогательная лебедка может только выбирать канат, что происходит каждый раз при появлении слабины в канатной проводке. В результате в условиях морского волнения происходит сокращение длины гибкой связи, вследствие чего возникает подъем опускаемого объекта с поверхности воды или уменьшение глубины его погружения.
Заявленное изобретение направлено на решение следующей задачи - обеспечение работоспособности и повышение эффективности использования опускаемого подводного объекта при его нахождении под водой или на ее поверхности в условиях морского волнения.
Технический результат, который достигается при решении поставленной задачи, выражается в отсутствии запутывания гибкой связи и стабилизации глубины погружения опускаемого подводного объекта за счет демпфирования возникающих в кабель-тросе продольных колебаний.
Поставленная задача решается тем, что в судовом спускоподъемном устройстве, содержащем установленную на судне грузовую и вспомогательную лебедки, на которые заведены концы гибкой связи, соединяющей судно с опускаемым с него подводным объектом, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу привода грузовой лебедки, и второй управляющий блок, первый вход которого подключен к второму задатчику, а выход - к управляющему входу привода вспомогательной лебедки, вспомогательная лебедка установлена на опускаемом объекте, гибкая механическая связь состоит из кабель-троса и каната, один конец которого заведен на барабан вспомогательной лебедки, а другой посредством замкового соединения прикреплен к кабель-тросу, один конец которого заведен на барабан грузовой лебедки, а другой прикреплен к корпусу опускаемого объекта с образованием петли на участке между этим объектом и упомянутым замковым соединением.
Поставленная задача решается также тем, что судовое СПУ снабжено измерительными преобразователями длины каната, смотанного с барабана вспомогательной лебедки, и скорости каната относительно опускаемого объекта, причем выходы этих измерительных преобразователей подключены соответственно к второму и третьему входам второго управляющего блока.
Кроме того, поставленная задача решается тем, что в качестве измерительных преобразователей длины каната, смотанного с барабана вспомогательной лебедки, и скорости каната относительно опускаемого объекта использованы измерительные преобразователи угла поворота и скорости вращения барабана вспомогательной лебедки.
Сопоставительный анализ признаков заявляемого решения и признаков аналога и прототипа свидетельствует о его соответствии критерию "новизна".
Благодаря размещению вспомогательной лебедки на опускаемом объекте гибкая связь имеет одну ветвь, что исключает запутывание каната. Подвес опускаемого объекта на канате, имеющем значительно меньший диаметр, чем у кабель-троса, позволяет уменьшить диаметр барабана вспомогательной лебедки, уменьшив его момент инерции, и тем самым улучшить динамические характеристики этой лебедки. Кроме того, наличие свободно провисающей петли кабель-троса повышает срок службы последнего, существенно уменьшая поперечные знакопеременные деформации концевой части кабель-троса. Канат же допускает во много раз большее количество изгибных деформаций по сравнению с кабель-тросом.
Устройство представляет собой систему автоматического регулирования, замкнутую отрицательными обратными связями по скорости и длине каната. На эту систему действуют возмущения, которые проявляются в изменении усилия, приложенного к канату со стороны кабель-троса. На возникающие за счет этого изменения скорости и длины каната система регулирования реагирует изменением момента двигателя электропривода вспомогательной лебедки так, что происходит демпфирование этих возмущений, чем обеспечивается эффективность стабилизации глубины погружения подводного опускаемого объекта независимо от длины кабель-троса, а также длительное нахождение опускаемого подводного объекта на взволнованной поверхности воды без рывков в канате.
Управление глубиной погружения подводного опускаемого объекта можно осуществить по двум каналам: воздействием как на привод грузовой лебедки, так и на привод вспомогательной лебедки. В последнем случае отсутствует отрицательное явление запаздывания в прохождении усилий по длинному кабель-тросу и уменьшается влияние колебательных свойств кабель-троса на глубину погружения, чем достигается возможность плавного изменения глубины погружения подводного объекта в небольших пределах, что очень важно, например, при выполнении подводных работ в придонной области.
Изобретение поясняется чертежом, на котором приведена функциональная схема устройства.
Судовое спуско-подъемное устройство, предназначенное для спуска и подъема подводного опускаемого объекта 1, содержит установленную на судне-носителе 2 грузовую лебедку 3, управляющий вход привода 4 которой подключен к выходу первого управляющего блока 5, вход которого подключен к первому задатчику 6. На барабан 7 лебедки запасован верхний конец кабель-троса 8, а его нижний конец посредством замкового механизма 9, выполняющего также функции гермоввода, соединен с подводным опускаемым объектом 1. На этом объекте установлена вспомогательная лебедка 10, на барабан 11 которой запасован нижний конец каната 12. Верхний конец каната посредством замкового соединения 13 соединен с кабель-тросом 8, причем последний между соединением 13 и механизмом 9 образует петлю. Управляющий вход привода 14 вспомогательной лебедки 10 подключен к выходу второго управляющего блока 15, первый вход которого через кабель-трос 8 и токосъемник 16 соединен со вторым задатчиком 17. Выходы связанных с барабаном 11 вспомогательной лебедки 10 измерительных преобразователей 18 и 19 соответственно длины и скорости каната 12 подключены соответственно к второму и третьему входам второго управляющего блока 15.
Судовое спускоподъемное устройство работает следующим образом.
Первым задатчиком 6 задается скорость грузовой лебедки 3, при вращении барабана 7 которой происходит сматывание или наматывание кабель-троса 8. Таким путем производится основное перемещение опускаемого подвижного объекта 1: опускание его на поверхность воды, выход на заданную глубину, а также подъем на судно-носитель 2. Вспомогательная лебедка 10 вместе со вторым управляющим блоком 15 образует систему автоматического управления моментом привода лебедки 10. Последний определяется суммой сигнала, который подается со второго задатчика 17 через кабель-трос 8 и задает среднее значение смотанной с барабана длины каната, и двух сигналов отрицательной обратной связи по длине и скорости каната, подаваемых от измерительных преобразователей 18 и 19. Момент на барабане лебедки 10 имеет две составляющие. Первая из них обусловлена сигналом с измерительного преобразователя 18 длины каната. Она пропорциональна отклонению смотанной с барабана 11 длины этого каната и, следовательно, расстоянию между замковым соединением 13 и подводным объектом 1 от заданного значения. Ее действие аналогично действию пружинного амортизатора. Вторая составляющая момента, обусловленная сигналом измерительного преобразователя 19 скорости каната, пропорциональна скорости изменения расстояния между замковым соединением 13 и опускаемым подводным объектом 1. Ее действие аналогично действию катаракта амортизирующего устройства. Чем больше длина смотанной с барабана лебедки части каната и чем с большей скоростью происходит его сматывание, тем больший момент развивает привод лебедки, тем большее усилие действует в канате. Момент вспомогательной лебедки 10 недостаточен для уравновешивания веса опускаемого подводного объекта 1 в воздухе. Поэтому на стадиях подъема подводного объекта 1 с судна-носителя и опускания его на поверхность воды, а также подъема этого объекта 1 с поверхности воды и опускания на судно-носитель петля кабель-троса между замковым соединением 13 и замковым механизмом 9 полностью растянута. При этом на барабане 11 вспомогательной лебедки 10 остается минимальная длина каната 12.
При нахождении опускаемого подводного объекта 1 на поверхность воды или под водой вес опускаемого подводного объекта 1 уменьшается, часть каната 12 наматывается на барабан вспомогательной лебедки 10, а кбаель-трос 8 на участке от замкового соединения 13 до замкового механизма 9 образует петлю. Среднюю длину смотанной части каната 12 можно изменять, подавая соответствующий сигнал со второго задатчика 17. При этом изменяется расстояние от замкового соединения 13 до опускаемого подводного объекта 1 и, следовательно, глубина его погружения. Таким путем производят дополнительное перемещение опускаемого подводного объекта 1 в вертикальном направлении, ограниченное полной длиной каната 12. Этим перемещением можно подрегулировать глубину погружения опускаемого подводного объекта 1, компенсируя, например, влияние течений, или осуществить плавное сближение опускаемого подводного объекта 1 с каким-либо предметом, расположенным на морском дне.
При изменении скорости грузовой лебедки 3 или под действием качки судна на морском волнении в кабель-тросе 8 возникают продольные механические колебания, распространяющиеся со скоростью звука в материале кабель-троса и отражающиеся от его концов. Возникающие при этом переменные усилия воздействуют через замковое соединение 13 и канат 12 на вспомогательную лебедку 10, изменяя момент на ее барабане 11.
Обе составляющие этого момента способствуют демпфированию перемещений замкового соединения 13. Так при перемещении этого соединения вверх канат сматывается с барабана 11 вспомогательной лебедки 10, а при перемещении соединения 13 вниз канат наматывается на барабан 11, уменьшая тем самым размах изменения усилия в канате 12 и перемещения опускаемого объекта 1.
Вспомогательная лебедка работает аналогичным образом и при нахождении опускаемого объекта на взволнованной поверхности воды, чем устраняется появление слабины и рывков в гибкой связи.
Источники информации
1. Авторское свидетельство СССР N 714606, кл. H 02 P 5/06. Устройство для управления электродвигателем судовой лебедки (Кувшинов Г.Е., Урываев К. П.), 1980, БИ N 5.
2. Авторское свидетельство СССР N 826538, кл. H 02 P 5/06. Устройство для управления электродвигателем судовой лебедки (Кувшинов Г.Е., Урываев К. П.), 1981, БИ N 16.
3. Бугаенко Б. А. , Магула В.Э., Специальные судовые устройства. - Л.: Судостроение, 1985. 392 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГЛУБИНОЙ ПОГРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2261191C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЖЕНИЕМ ПОДВОДНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2590801C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2381133C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВОДНЫМ ОБЪЕКТОМ | 2015 |
|
RU2584351C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2012 |
|
RU2513343C2 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2014 |
|
RU2585500C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО | 2010 |
|
RU2445230C2 |
| АГРЕГАТ ДЛЯ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2000 |
|
RU2181838C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
Спускоподъемное устройство содержит грузовую лебедку, установленную на судне, и вспомогательную лебедку, установленную на опускаемом объекте, а также первый управляющий блок, вход которого подключен к первому задатчику, а выход - к управляющему входу грузовой лебедки, и второй управляющий блок, первый вход которого подключен к второму задатчику, а выход - к управляющему входу привода вспомогательной лебедки. Указанные лебедки соединены гибкой связью, состоящей из кабель-троса и каната, причем один конец каната заведен на барабан вспомогательной лебедки, а другой - прикреплен к кабель-тросу, один конец которого заведен на барабан грузовой лебедки, в второй - соединен с корпусом спускаемого объекта, что обеспечивает исключение запутывания гибкой связи и улучшает стабилизацию глубины погружения. 2 з.п.ф-лы, 1 ил.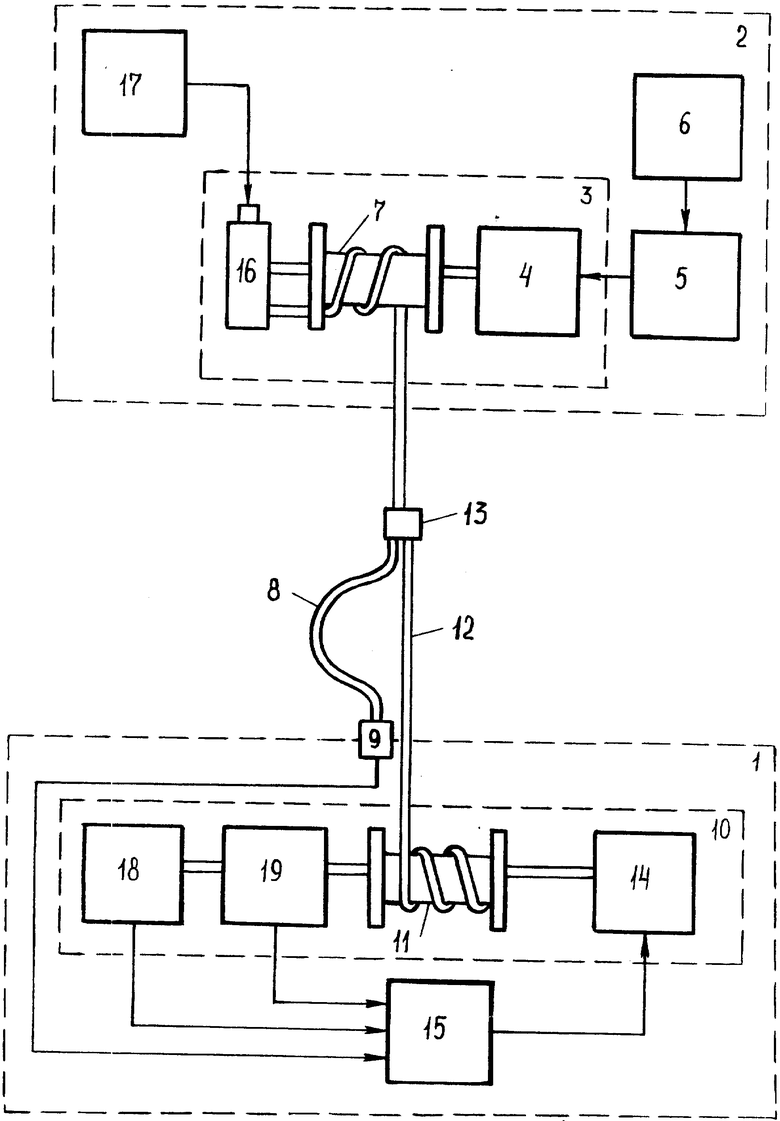
| Бугаенко Б.А., Магула В.Э | |||
| Специальные судовые устройства | |||
| - Л.: Судостро ение, 1985, 392 С. |
