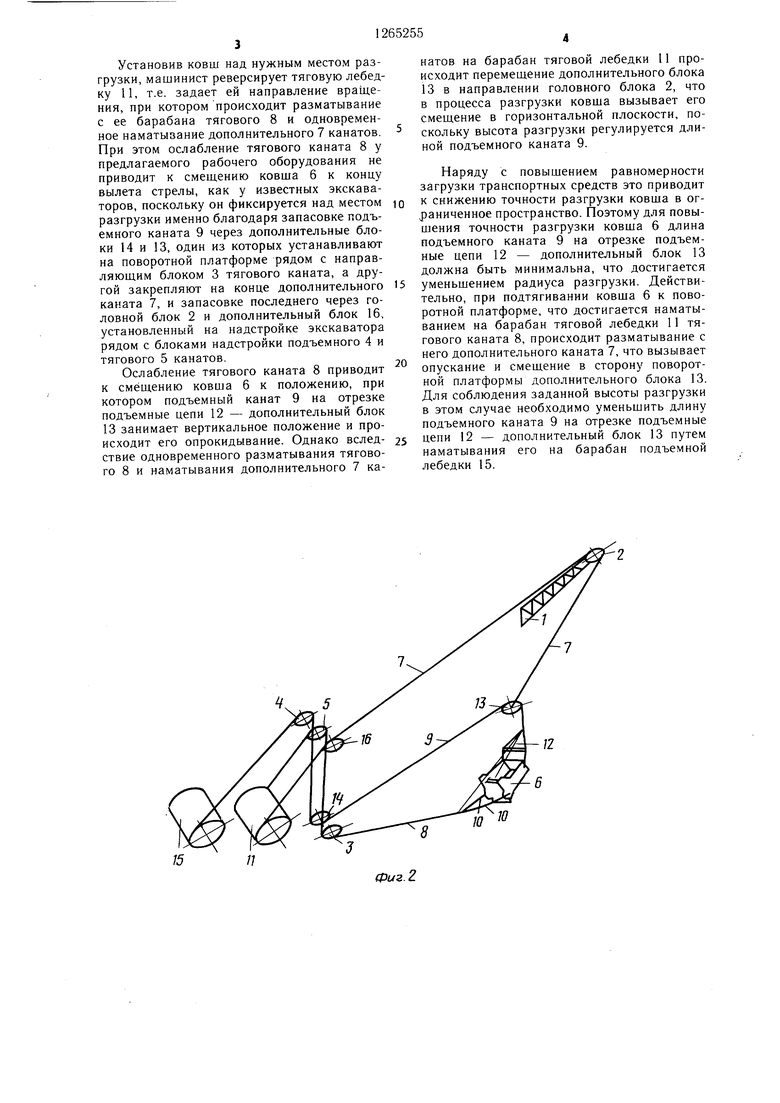
Изобретение относится к землеройным машинам, а именно к экскаваторам-драглайнам. Цель изобретения - упрощение оборудования и управления. На фиг. 1 изображена схема запасовки канатов рабочего оборудования при транспортном положении ковша; на фиг. 2 - то же, при разгрузке ковша; на фиг. 3 - схема набора грунта при нижнем черпании, вид сбоку; на фиг. 4 - схема навивки тягового и дополнительного канатов на барабане тяговой лебедки в начале копания, вид сверху; на фиг. 5 - то же,.в конце копания; на фиг. 6 - схема погрузки горной массы в средства транспорта, вид сбоку. Рабочее оборудование содержит стрелу 1, головной блок 2, направляющий блок 3 тягового каната, блок 4 надстройки подъемного каната, блок 5 надстройки тягового каната, ковш 6 с упряжью, дополнительный 7, тяговый 8 и подъемный 9 канаты. Тяговый канат 8 соединяют с тяговыми цепями 10, запасовывают через направляющий блок 3 тягового каната, блок 5 надстройки тягового каната и закрепляют на барабане тяговой лебедки 11. Подъемный канат 9 соединяют с подъемными цепями 12, запасовывают через дополнительный блок 13, закрепленный на конце дополнительного каната 7, и пропускают через дополнительный блок 14, установленный на поворотной платформе экскаватора между опорами стрелы 1 рядом с направляющим блоком 3 тягового каната. Далее подъемный канат 9 запасовывают через блок 4 надстройки подъемного каната и закрепляют на барабане подъемной лебедки 15. При этом дополнительный канат 7 с закрепленным на его конце дополнительным блоком 13 запасовывают через головной блок 2 и через дополнительный блок 16, установленный на надстройке экскаватора рядом с блоком 4 надстройки подъемного каната и блоком 5 надстройки тягового каната. После этого свободный конец дополнительного каната 7 закрепляют на барабане тяговой лебедки 11 с противоположной стороны от точки закрепления на нем тягового каната 8. При этом направление навивки дополнительного каната 7 на барабане тяговой лебедки 11 должно быть противоположно направлению навивки на нем тягового каната 8. Длина тягового каната 8 определяется из возможности работы драглайна нижним забоем при максимальном радиусе и глубине черпания. Длина дополнительного каната 7 определяется из возможности работы драглайна при минимальном радиусе черпания, т.е. при нахождении ковша 6, производящего набор грунта, в непосредственной близости от поворотной платформы. Длина подъемного каната 9 определяется максимальной глубиной черпания, т.е. как и у обычных драглайнов. Работа машины с рабочим оборудованием заключается в следующем. Для набора грунта, например, при максимальном радиусе и глубине черпания маилинист включает тяговую лебедку 11 и задает ей направление вращения, при котором происходит разматывание с нее тягового 8 и одновременное наматывание дополнительного 7 канатов. Одновременно включается подъемная лебедка 15 и ее барабану задается направление вращения, при котором происходит разматывание с него подъемного каната 9. В этом случае, вследствие наматывания дополнительного каната 7 на барабан тяговой лебедки 11, дополнительный блок 13 перемещается в направлении головного блока 2, а разматывание тягового 8 и подъемного 9 канатов приводит к перемещению ковша 6 к концу вылета стрелы и одновременному его опусканию на поверхность забоя. Таким образом, на этом этапе работы драглайна управление им не отличается от машин с постоянным радиусом разгрузки. Для набора грунта (фиг. 3) машинист изменяет направление вращения барабана тяговой лебедки 11 для наматывания на него тягового 8 и одновременного разматывания дополнительного 7 канатов (фиг. 4 и 5). Наматывание тягового каната 8 на барабан тяговой лебедки 11 приводит к перемещению ковша 6 по поверхности забоя в направлении поворотной платформы и набору грунта. Одновременное разматывание с барабана тяговой лебедки 11 дополнительного каната 7 приводит к перемещению поворотной платформы экскаватора. Образующаяся при этом слабина подъемного каната 9 выбирается наматыванием его на барабан подъемной лебедки 15, которая в этом случае работает с усилием, недостаточным для отрыва ковша 6 от поверхности забоя. После окончания набора грунта машинист увеличивает усилие в подъемной лебедке 15 и в результате наматывания на ее барабан подъемного каната 9 происходит отрыв ковша 6 от поверхности забоя. Далее, продолжая наматывать пбдъемный канат 9 на барабан подъемной лебедки 15, машинист включает тяговую лебедку 11 и задает ей направление вращения, при котором происходит наматывание на ее барабан тягового каната 8 и одновременное разматывание с него дополнительного каната 7. Работа подъемной и тяговой лебедок в указанном режиме приводит к одновременному подъему груженого ковша 6 и его перемещению в направлении поворотной платформы экскаватора. Совмещая эти операции с поворотом корпуса, машинист может установить ковш над нужным местом разгрузки, например над автосамосвалом (фиг. 6). Установив ковш над нужным местом разгрузки, машинист реверсирует тяговую лебедку 11, т.е. задает ей направление враш.ения, при котором происходит разматывание с ее барабана тягового 8 и одновременное наматывание дополнительного 7 канатов. При этом ослабление тягового каната 8 у предлагаемого рабочего оборудования не приводит к смеш,ению ковша 6 к концу вылета стрелы, как у известных экскаваторов, поскольку он фиксируется над местом разгрузки именно благодаря запасовке подъемного каната 9 через дополнительные блоки 14 и 13, один из которых устанавливают на поворотной платформе рядом с направЛЯЮШ.ИМ блоком 3 тягового каната, а другой закрепляют на конце дополнительного каната 7, и запасовке последнего через головной блок 2 и дополнительный блок 16, установленный на надстройке экскаватора рядом с блоками надстройки подъемного 4 и тягового 5 канатов. Ослабление тягового каната 8 приводит к смёш,ению ковша 6 к положению, при котором подъемный канат 9 на отрезке подъемные цепи 12 - дополнительный блок 13 занимает вертикальное положение и происходит его опрокидывание. Однако вследствие одновременного разматывания тягового 8 и наматывания дополнительного 7 канатов на барабан тяговой лебедки I1 происходит перемещение дополнительного блока 13 в направлении головного блока 2, что в процесса разгрузки ковша вызывает его смешение в горизонтальной плоскости, поскольку высота разгрузки регулируется длиной подъемного каната 9. Наряду с повышением равномерности загрузки транспортных средств это приводит к снижению точности разгрузки ковша в ограниченное пространство. Поэтому для повышения точности разгрузки ковша б длина подъемного каната 9 на отрезке подъемные цепи 12 - дополнительный блок 13 должна быть минимальна, что достигается уменьшением радиуса разгрузки. Действительно, при подтягивании ковша 6 к поворотной платформе, что достигается наматыванием на барабан тяговой лебедки 11 тягового каната 8, происходит разматывание с него дополнительного каната 7, что вызывает опускание и смещение в сторону поворотной платформы дополнительного блока 13. Для соблюдения заданной высоты разгрузки в этом случае необходимо уменьшить длину подъемного каната 9 на отрезке подъемные цепи 12 - дополнительный блок 13 путем наматывания его на барабан подъемной лебедки 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование экскаватора-драглайна | 1985 |
|
SU1283303A1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |
| Экскаватор-драглайн | 1990 |
|
SU1728394A1 |
| ВЫЕМОЧНО-ПОГРУЗОЧНЫЙ ДРАГЛАЙН | 2022 |
|
RU2802772C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ДРАГЛАЙНА ШАГАЮЩЕГО ПОГРУЗОЧНОГО | 1993 |
|
RU2090705C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ДРАГЛАЙНА | 1995 |
|
RU2078876C1 |
| ПОГРУЗОЧНЫЙ ЭКСКАВАТОР-ДРАГЛАЙН | 2010 |
|
RU2431719C1 |
| Рабочее оборудование экскаватора-драглайна | 1986 |
|
SU1404596A1 |
| Рабочее оборудование драглайна | 1975 |
|
SU606945A1 |
| Рабочее оборудование экскаватора-драглайна | 1986 |
|
SU1335648A1 |

РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ДРАГЛАЙНА, включающее расположенные на поворотной платформе стрелу с головным блоком, надстройку с блоками, блок тягового каната, лебедку с подъемным канатом и тяговую лебедку с барабаном, соединенные соответственно с подъемным и тяговым канатами, запасованными на поворотной платформе и надстройке, ковш с упряжью и дополнительный канат, отличающееся тем, что, с целью упрощения управления, оно снабжено дополнительным блоком, расположенным на конце дополнительного каната и дополнительными блоками, расположенными на поворотной платформе и надстройке, при этом дополнительный канат запасован через головной блок и дополнительный блок надстройки, а его свободный конец и конец тягового каната соединены с возможностью противоположной навивки с барабаном тяговой лебедки, причем подъемный канат запасован через дополнительные блоки, расположенные на конце дополнительного каната и поворотной i платформе. (/ 60 О5 сд Ю ел ел
| Ковш экскаватора-драглайна | 1982 |
|
SU1006647A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 2978820, кл | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Судно | 1925 |
|
SU1961A1 |
