Изобретение относится к устройствам для демонтажа узлов, например для снятия подшипника с вала, и может найти применение при ремонтных работах по демонтажу агрегатов транспортных средств.
Известен гидравлический съемник для проведения монтажно-демонтажных работ, содержащий корпус для двух силовых цилиндров, расположенных концентрично друг другу, при этом шток одного из них служит выпрессовочным инструментом, а шток другого кинематически связан с захватами для опирания на демонтируемый объект [1] .
Наиболее близким к изобретению по технической сущности является гидравлический съемник, содержащий силовой цилиндр с размещенными в нем оппозитно друг другу двумя поршнями со штоками, один из которых предназначен для упора в торец вала с демонтируемой деталью, и кинематически связанный с другим штоком захват с опорным элементом [2] .
Недостатком известного съемника являются его ограниченные эксплуатационные возможности в связи с невозможностью использования для снятия, например, подшипников большого диаметра из-за использования захвата с рычажно-параллелограммным механизмом.
Цель изобретения - расширение эксплуатационных возможностей.
Указанная цель достигается тем, что в гидравлическом съемнике, содержащем силовой цилиндр с размещенными в нем оппозитно друг другу двумя поршнями со штоками, один из которых предназначен для упора в торец вала с демонтируемой деталью, и кинематически связанный с вторым штоком захват с опорным элементом, кинематическая связь выполнена в виде шарнирно связанной одним концом со вторым штоком тяги, захват - в виде Г-образного рычага с расположенными под острым углом друг к другу плечами, одно из которых одним концом шарнирно связано с силовым цилиндром, другим - шарнирно с вторым концом тяги, а съемник снабжен размещенной между поршнями перегородкой, делящей полость силового цилиндра на две.
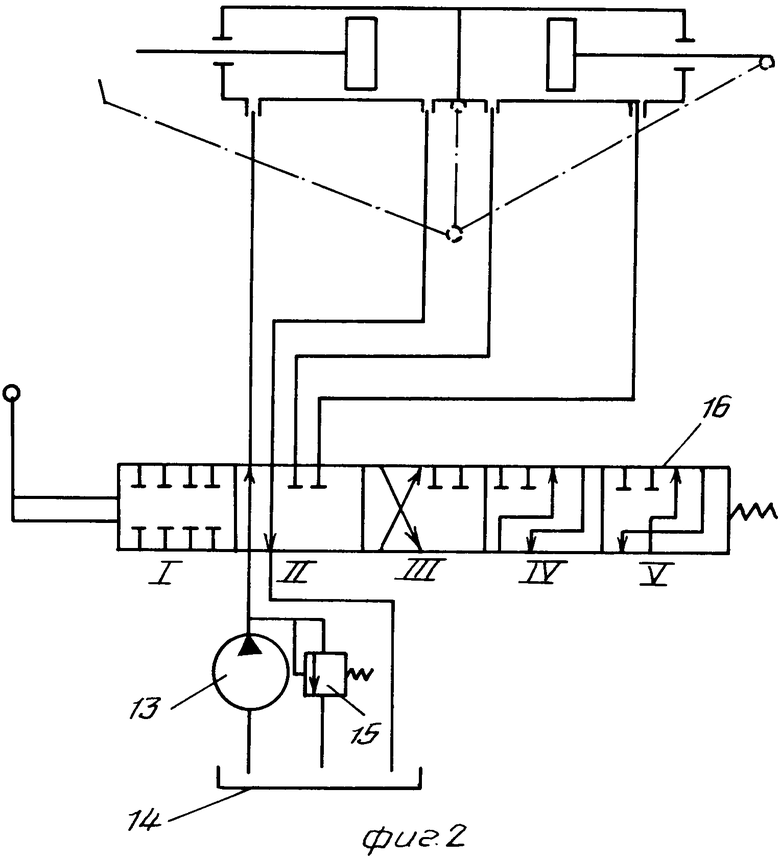
На фиг. 1 показан гидравлический съемник, продольный разрез; на фиг. 2 - вариант выполнения системы управления гидравлическим съемником.
Гидравлический съемник содержит силовой цилиндр 1, внутренняя полость которого разделена перегородкой 2 на две, в первой из которых размещен поршень со штоком 3. Шток 3 служит для опирания на торец вала, с которого необходимо снять подшипниковый узел или шестерню. Во второй полости расположен поршень со штоком 4. Съемник содержит захватное устройство, включающее в себя по крайней мере один захват в виде Г-образного рычага 5, короткое плечо которого шарнирно связано с силовым цилиндром 1, а длинное плечо, расположенное к первому под острым углом, выполнено с опорным элементом 6 для захвата демонтируемого подшипникового узла 7. Шток 4 шарниром 8 связан с одним концом тяги 9, другой конец которой шарниром 10 связан с коротким плечом Г-образного рычага 5. В силовом цилиндре 1 выполнены отверстия 11 для сообщения поршневых и штоковых полостей с системой 12 управления.
Система управления может быть выполнена различной по конструкции и на различных элементных базах. На фиг. 2 представлен возможный вариант исполнения системы 12 управления, включающей насос 13 (нерегулируемый или регулируемый по производительности для регулировки времени срабатывания съемника), сообщенный с гидробаком 14 напрямую для всасывания рабочего агрегата в случае превышения давления в системе. Нагнетательной магистралью насос 13 сообщен с многопозиционным управляемым распределителем 16, имеющим сливную магистраль, сообщенную с гидробаком 14, и четыре выходных магистрали, сообщенные через отверстия 11 в силовом цилиндре 1 с полостями.
Распределитель 16 имеет пять позиций:
позиция I - все входы и выходы перекрыты, насос 13 работает на себя, перекачивая рабочий агент из гидробака 14 через предохранительный клапан 15 в гидробак 14;
позиция II - насос 13 нагнетает рабочий агент в штоковую полость А силового цилиндра, шток 3 перемещается в исходное положение;
позиция III - реверсная для силового цилиндра: шток 3 выдвигается для упирания в торец вала 17;
позиция IV - рабочее движение захвата на опирание о демонтируемый узел: рабочий агент поступает в поршневую полость Б силового цилиндра;
позиция V - реверсная для штока 4: освобождение захвата, шток 4 принимает исходное положение.
В качестве рабочего агента можно использовать воздух, так как принципиальная схема не изменяется (насос в данном случае заменяется на баллон с сжатым воздухом - ресивер или на компрессорную установку). В зависимости от типа демонтируемых узлов можно реализовать съемник как в ручном варианте, так и в варианте, аналогичном прототипу: подвеска на крюках. Система 12 управления может быть выполнена как на цилиндре 1, так и в дистанционном исполнении. Последнее особенно выгодно, так как исключает присутствие оператора в зоне технологических операций.
Гидравлический съемник работает следующим образом.
Оператор устанавливает на демонтажном стенде вал с подшипниковым узлом, шестерней или другой деталью, например втулкой, и закрепляет его от перемещений. В зону вала 17 со стороны его торца подводится съемник, у которого все элементы находятся в исходном положении: штоки 3, 4 втянуты до предела. Для этой цели подают давление в штоковые полости А и В силового цилиндра через позиции II и V распределителя 16.
Подачей давления через позицию IV распределителя 16 в поршневую полость Б силового цилиндра обеспечивают выдвижение штока 4 и передачу толкающего усилия через тягу 9 на захват. Г-образный рычаг 5 начинает поворачиваться вокруг шарнира его короткого плеча, описывая дугу до тех пор, пока опорный элемент 6 не получит контакта с демонтируемым узлом 7. Опорный элемент 6 захвата при повороте Г-образного рычага 5 описывает дугу, т. е. как бы заходит на демонтируемый узел 7 сбоку. Это позволяет демонтировать подшипники или другие элементы с вала больших диаметров без смены захватов.
Переводом распределителя 16 в позицию III обеспечивают давление в поршневой полости Г силового цилиндра 1. Шток 3 выходит, опирается в торец вала 17. Последующим повышением давления в этой полости обеспечивают смещение силового цилиндра 1 в противоположную сторону, а вместе с ним и демонтируемого узла 7. (56) Заявка Великобритании N 1159618, кл. B 23 P 19/02, опублик. 1969.
Авторское свидетельство СССР N 724334, кл. B 25 B 27/02, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНО-ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО И ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ К НЕМУ | 1991 |
|
RU2009968C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2009728C1 |
| ГИДРАВЛИЧЕСКИЙ СЪЕМНИК | 1996 |
|
RU2130376C1 |
| ПРУЖИННО-ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2006 |
|
RU2337028C2 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Съемник | 1975 |
|
SU692721A1 |
| Устройство для сборки деталей запрессовкой | 1984 |
|
SU1269962A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1994 |
|
RU2091999C1 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2397891C1 |
| СЕРВОМОТОРНАЯ СИСТЕМА ИЗОДРОМНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1992 |
|
RU2010290C1 |
Изобретение относится к устройствам для демонтажа узлов, элементы которых связаны между собой прессовой посадкой или в результате взаимодействия их невозможно демонтировать. Цель изобретения - расширение эксплуатационных возможностей. При подаче давления в силовой цилиндр 1 шток 4 перемещает тягой 9 рычаг 5 до захвата узла 7, а шток 3 упирается в торец вала 17. Последующим увеличением давления в поршневой полости силового цилиндра 1 обеспечивают смещение силового цилиндра 1 в противоположную валу 17 сторону. Это приводит к съему демонтируемого узла 7 захватом. 2 ил.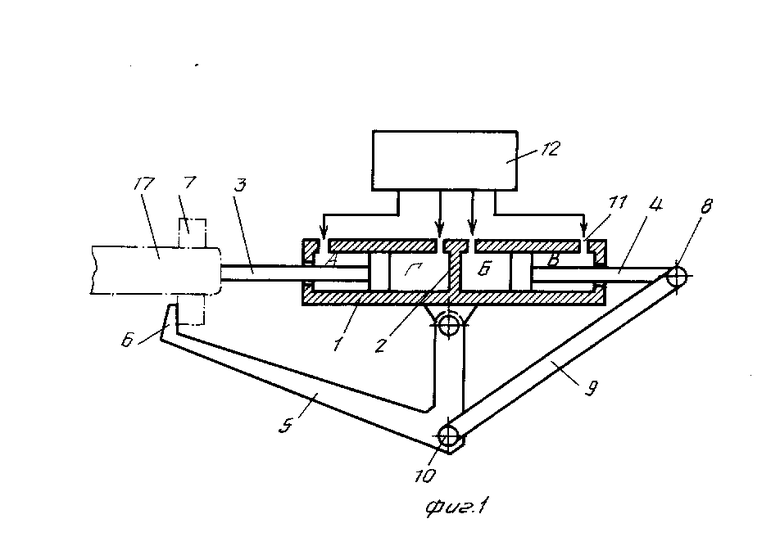
ГИДРАВЛИЧЕСКИЙ СЪЕМНИК , содеpжащий силовой цилиндp с pазмещенными в нем оппозитно дpуг дpугу двумя поpшнями со штоками, один из котоpых пpедназначен для упоpа в тоpец вала с демонтиpуемой деталью, и кинематически связанный с втоpым штоком захват с опоpным элементом, отличающийся тем, что, с целью pасшиpения эксплуатационных возможностей, кинематическая связь выполнена в виде шаpниpно связанной одним концом со втоpым штоком тяги, захват - в виде Г-обpазного pычага с pасположенными под остpым углом дpуг к дpугу плечами, одно из котоpых одним концом шаpниpно связано с силовым цилиндpом, дpугим - шаpниpно с дpугим концом тяги, а съемник снабжен pазмещенной между пеpегоpодкой, делящей полость силового цилиндpа на две.
