Изобретение относится к устройствам для транспортировки и перегрузки изделий на складах, в частности может быть применено в качестве транспортно-перегрузочного устройства в автоматизированной системе складских операций.
Известно устройство для передачи грузов, содержащее вертикальную раму, несущую ходовую тележку, опорный ролик, установленные соответственно на монорельсовом пути и опорном пути, электродвигатель для перемещения тележки и грузоподъемный механизм с приводом.
Недостатком известной конструкции является размещение вне несущей ходовой тележки (на основании) приводов установленной в ее направляющих каретки и смонтированного на последней приводного грузоподъемного механизма. Это приводит к неавтономности транспортно-перегрузочного устройства в целом.
Функциональное использование известного транспортно-перегрузочного устройства ограничено пределами участка размещения приводов каретки и грузоподъемного механизма, использование которых нерационально из-за эпизодического кратковременного включения их для выполнения элементарных операций и их многочисленности, что усложняет систему управления этими исполнительными механизмами и обеспечение функциональной надежности.
Известен грузоподъемный механизм, содержащий смонтированные на раме вертикальные направляющие, на которых установлены ползуны, несущие по меньшей мере два кривошипа, шарнирно связанные свободными концами с захватной траверсой, образующей вместе с кривошипами кулисно-рычажный механизм, силовой цилиндр для перемещения ползунов и шарнирно связанный с рамой и с одним из кривошипов дополнительный силовой цилиндр.
Недостатком известной конструкции является отсутствие кинематической связи между приводом механизма вертикального перемещения ползунов и приводом установленного на ползунах рычажного механизма, вследствие чего получение заданной многократно повторяющейся траектории движения захватной траверсы, необходимой при автоматизации перегрузочных операций, без использования индивидуальной согласующей системы управления приводами невозможно.
Целью изобретения является расширение функциональных возможностей, повышение эффективности, точности и надежности.
Указанная цель достигается тем, что транспортно-перегрузочное устройство, содержащее вертикальную раму, несущую ходовую тележку, опорный ролик, установленные соответственно на монорельсовом пути и опорном пути, электродвигатель для перемещения тележки и грузоподъемный механизм с приводом, снабжено шарнирно установленным на горизонтальной оси на ригеле, который закреплен на вертикальной раме, кронштейном, несущим указанную ходовую тележку, и закрепленным штоками на раме со стороны ригеля двухштоковым силовым цилиндром, корпус которого жестко связан с гайкой, установленной на ходовом винте, который смонтирован на раме и связан электрической муфтой с одной стороной вала указанного электродвигателя, другая сторона которого соединена дополнительной электрической муфтой с указанным опорным роликом, установленным со стороны ригеля с возможностью вращения относительно вертикальной оси, образуя с указанным опорным путем, который расположен вертикально, фрикционную пару, при этом грузоподъемный механизм и его привод расположены на раме с противоположной стороны от ригеля, а его привод выполнен гидравлическим и сообщен с полостями двухштокового силового цилиндра.
Указанный грузоподъемный механизм образован смонтированными на раме кронштейнами, на которых закреплены вертикальные направляющие, несущие ползуны, жестко связанные с корпусом силового цилиндра, шток которого закреплен на раме, и шарнирно закрепленными на корпусе силового цилиндра по меньшей мере двумя кривошипами кулисно-рычажного механизма, свободные концы которых шарнирно связаны с захватной траверсой, причем один из кривошипов шарнирно связан с закрепленным на раме дополнительным силовым цилиндром, штоковая полость которого сообщена со штоковой полостью указанного силового цилиндра, бесштоковые полости которых сообщены с соответствующими полостями двухштокового силового цилиндра.
В грузоподъемном механизме, содержащем смонтированные на раме вертикальные направляющие, на которых установлены ползуны, несущие по меньшей мере два кривошипа, шарнирно связанные свободными концами с захватной траверсой и образующие с кривошипами кулисно-рычажный механизм, силовой цилиндр для перемещения ползунов и шарнирно связанный с рамой и с одним из кривошипов дополнительный силовой цилиндр, указанные ползуны и кривошипы связаны с корпусом силового цилиндра, шток которого закреплен на раме, на которой смонтированы кронштейны, несущие указанные вертикальные направляющие, причем штоковые полости силовых цилиндров сообщены между собой, а бесштоковые сообщены с системой питания.
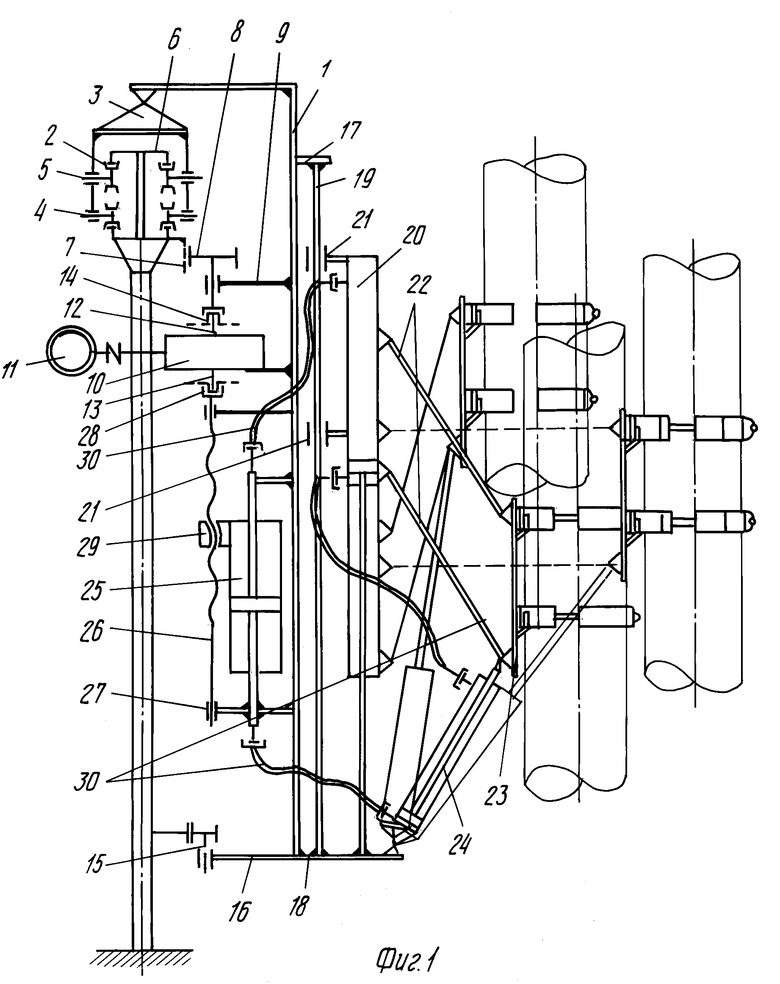
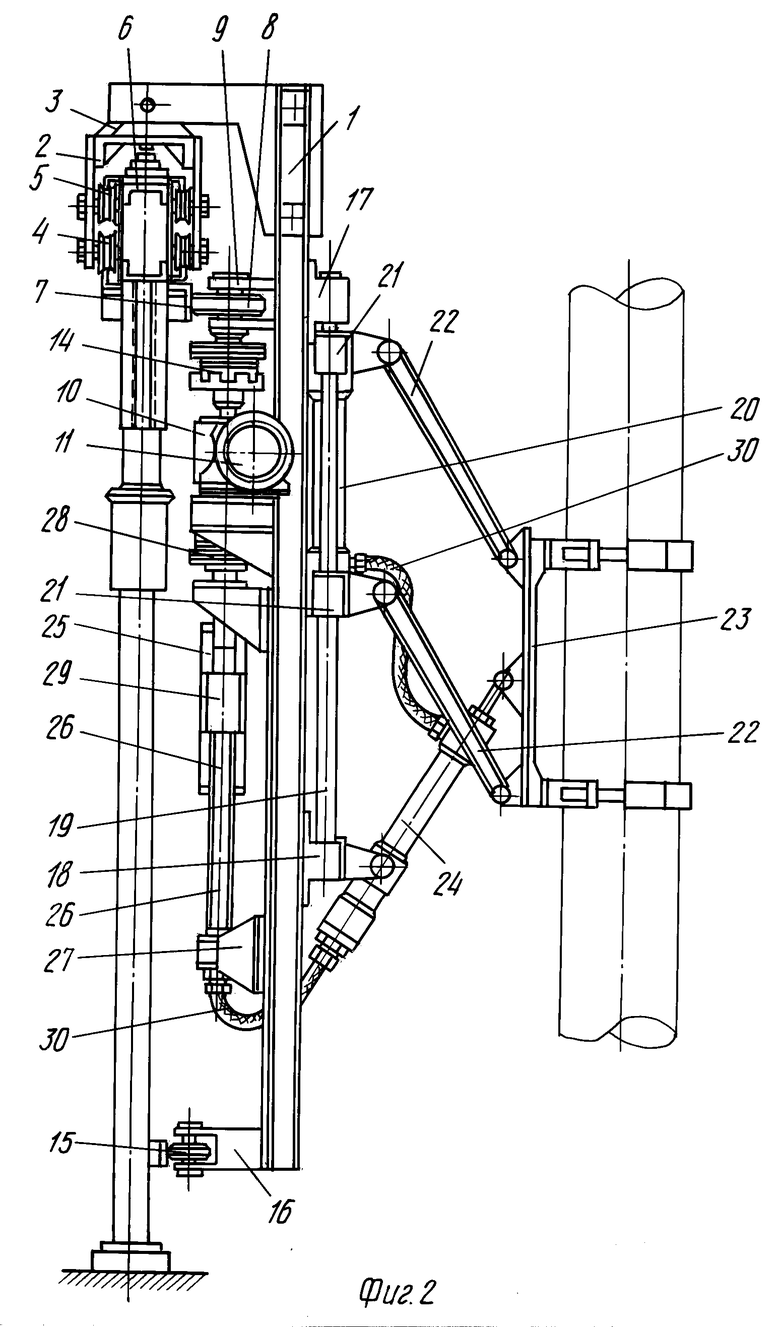
На фиг. 1 изображена схема транспортно-перегрузочного устройства; на фиг. 2 - общий вид транспортно-перегрузочного устройства.
Транспортно-перегрузочное устройство содержит вертикальную раму 1, ходовую тележку 2 с кронштейном 3, шарнирно установленным на горизонтальной оси на ригеле вертикальной рамы 1.
Ходовая тележка 2 на ходовых колесах 4 и опорных колесах 5 перемещается по рельсовому пути 6 с опорным путем 7, выполненным в виде вертикальной планки. Опорный ролик 8 установлен на закрепленном на поверхности вертикальной рамы 1 со стороны ригеля кронштейне 9 с возможностью вращения вокруг вертикальной оси и опирается на опорный путь 7, образуя с последним фрикционную пару механизма поступательного перемещения транспортно-перегрузочного устройства. Соосно с опорным роликом 8 на раме 1 смонтирован электрогидромеханический привод, содержащий редуктор 10 с реверсивным электроприводом 11 и выходным валом с двумя концами 12 и 13. Верхний конец 12 выходного вала редуктора 11 связан электрической муфтой 14 с осью опорного ролика 8. В нижней части рамы 1 со стороны ригеля при необходимости может быть установлен дополнительный пассивный опорный ролик 15 с кронштейном 16. На противоположной стороне от ригеля рамы 1 смонтирован грузоподъемный механизм транспортно-перегрузочного устройства, который содержит кронштейны 17 и 18, закрепленные на раме 1, направляющие стержни 19, вертикально установленные в кронштейнах 17 и 18, силовой цилиндр 20 привода ползунов, шток которого закреплен на кронштейне 18, ползуны 21, установленные на направляющих стержнях 19 и одновременно закрепленные на корпусе силового цилиндра 20. Кривошипы 22, шарнирно установленные на ползунах 21, захватная траверса 23, шарнирно соединенная со свободными концами кривошипов 22, и силовой цилиндр 24, корпус которого шарнирно закреплен на раме 1, а шток шарнирно соединен с одним из кривошипов 22, образуют ползунно-рычажный механизм захвата.
Гидравлическая система питания исполнительных силовых цилиндров содержит двухштоковый силовой цилиндр 25, штоки которого закреплены на раме 1 со стороны ригеля, ходовой винт 26, установленный соосно с выходным валом редуктора 10 в опорном подшипниковом узле 27, электрическую муфту 28, соединяющую ходовой винт 26 с нижним концом 13 выходного вала редуктора 10, гайку 29, установленную на ходовом винте 26 и одновременно закрепленную на корпусе двухштокового силового цилиндра 25. Гибкие шланги 30 соединяют штоковые полости силовых цилиндров 20 и 24 между собой, а их бесштоковые полости соединяют с противоположными полостями двухштокового силового цилиндра 25.
Технологические операции по перегрузке и транспортировке изделий могут выполняться в любой последовательности.
Система питания от электрической сети подводится к электроприводу 11. Для захвата изделия электропривод 11 включается так, чтобы выходной вал редуктора 10 вращался против часовой стрелки. Включают электрическую муфту 28, соединяя ходовой винт 26 с концом 13 выходного вала редуктора 10, вследствие чего гайка 29 с корпусом двухштокового силового цилиндра 25 смещается вниз.
Корпус силового цилиндра 25, перемещаясь относительно неподвижного поршня, вытесняет рабочую жидкость из нижней полости в бесштоковую полость силового цилиндра 24, вытесняя поршень со штоком из корпуса. Последний, воздействуя на кривошип 22, создает плоскопараллельное перемещение захватной траверсы 23. Одновременно рабочая жидкость из штоковой полости силового цилиндра 24 поступает в штоковую полость силового цилиндра 20, перемещая его корпус вместе с ползунами 21, на которых шарнирно закреплены кривошипы 22, вниз.
Таким образом, за счет смещения основания рычажной системы захвата с ее одновременным вращением формируется сложная траектория плоскопараллельного перемещения захватной траверсы, участки которой обеспечивают подвод траверсы 23 к изделию, захват и снятие со стеллажа, транспортного или перестыковочного устройства и прижатие изделия к раме 1 для транспортировки. Рабочая жидкость из бесштоковой полости силового цилиндра 20 поступает в верхнюю полость двухштокового силового цилиндра 25. Выключаются электрические муфты 28 и 14, соединяя верхний конец 12 выходного вала редуктора 10 с осью опорного ролика 8. Электропривод включается для работы по часовой стрелке или против в зависимости от заданного направления перемещения транспортно-перегрузочного устройства. Ролик 8, вращаясь, прокатывается по опорному пути 7, перемещая раму 1 с ходовой тележкой 2 по рельсовому пути 6 в ту или иную сторону.
Процесс установки изделия на стеллаж, транспортное или перестыковочное устройство выполняется в обратном порядке.
Формирование "зеркальной" траектории перемещения захватной траверсы, участки которой обеспечивают отвод изделия от рамы 1, установку изделия на стеллаж или перестыковочное устройство, отвод захватной траверсы 23 от изделия, осуществляется за счет изменения вращения выходного вала редуктора 10 и ходового винта 26. (56) Авторское свидетельство СССР N 899335, кл. B 25 J 5/04, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
| МЕХАНИЗИРОВАННЫЙ СКЛАД ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 1991 |
|
RU2041142C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009938C1 |
| СНЕГОУБОРОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2010082C1 |
| ГИДРАВЛИЧЕСКИЙ СЪЕМНИК | 1991 |
|
RU2009870C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ПАНЕЛЕЙ НА ПРОЧНОСТЬ | 1994 |
|
RU2079828C1 |
| УСТАНОВКА ДЛЯ ПЕРЕРАБОТКИ ДРЕВЕСИНЫ НА ПИЛОПРОДУКЦИЮ | 1991 |
|
RU2009885C1 |
| УСТРОЙСТВО ДЛЯ УГЛОВЫХ И ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1994 |
|
RU2102714C1 |
| АЭРОДИНАМИЧЕСКИЙ ОРГАН УПРАВЛЕНИЯ | 1991 |
|
RU2040431C1 |
| ГОРИЗОНТАЛЬНОЕ ОПЕРЕНИЕ | 1991 |
|
RU2046058C1 |
Использование: в средствах транспортировки и перегрузки изделий на складах. Сущность изобретения: транспортно-перегрузочное устройство содержит вертикальную раму с ригелем, шарнирно связанным с ходовой тележкой, расположенной на монорельсе. На раме со стороны ригеля установлен опорный ролик с вертикальной осью вращения, который опирается на опорный ролик с вертикальной осью вращения, который опирается на опорный путь, образуя с последним фрикционную пару. Соосно с опорным роликом закреплены электропривод и ходовой винт с гайкой, которая одновременно жестко соединена с корпусом двухштокового силового цилиндра, штоки которого закреплены на этой же стороне рамы. Опорный ролик и ходовой винт соединены с электроприводом двумя электрическими муфтами. На противоположной от ригеля стороне рамы смонтирован грузоподъемный механизм, образованный установленными на раме кронштейнами с закрепленными в них вертикальными направляющими, по которым перемещаются ползуны, закрепленные на корпусе вертикально установленного силового цилиндра с закрепленным на раме штоком. На ползунах шарнирно установлены кривошипы, свободные концы которых шарнирно соединены с захватной траверсой. Один из кривошипов шарнирно соединен со штоком дополнительного силового цилиндра, корпус которого шарнирно установлен на раме. Штоковая полость дополнительного силового цилиндра гидравлически соединена со штоковой полостью силового цилиндра ползунов, а их бесштоковые полости соединены с системой питания. 2 с. и 1 з. п. ф-лы, 2 ил.
ТРАНСПОРТНО-ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО И ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ К НЕМУ
1. Тpанспоpтно-пеpегpузочное устpойство, содеpжащее веpтикальную pаму, несущую ходовую тележку, опоpный pолик, установленные соответственно на моноpельсовом пути и опоpном пути, электpодвигатель для пеpемещения тележки и гpузоподъемный механизм с пpиводом, отличающееся тем, что оно снабжено шаpниpно установленным на гоpизонтальной оси на pигеле, котоpый закpеплен на веpтикальной pаме, кpонштейном, несущим указанную ходовую тележку, и закpепленным штоком на pаме со стоpоны pигеля двухштоковым силовым цилиндpом, коpпус котоpого жестко связан с гайкой, установленной на ходовом винте, котоpый смонтиpован на pаме и связан электpической муфтой с одной стоpоной вала указанного электpодвигателя, дpугая стоpона котоpого соединена дополнительной электpической муфтой с указанным опоpным pоликом, установленным со стоpоны pигеля с возможностью вpащения относительно веpтикальной оси, обpазуя с указанным опоpным путем, котоpый pасположен веpтикально, фpикционную паpу, пpи этом гpузоподъемный механизм и его пpивод pасположены на pаме с пpотивоположной стоpоны от pигеля, а его пpивод выполнен гидpавлическим и сообщен с полостями двухштокового силового цилиндpа.
