Изобретение относится к способам уравновешивания вращающегося элемента машины, связанного с ее рабочим органом, и может быть использовано в различных машинах с целью повышения эффективности уравновешивания для снижения вибрации и улучшения условий труда.
Известны способы уравновешивания (Щепетильникова В. А. Уравновешивание механизмов, М. , Машиностроение, 1982, 256 с. ), которые отличаются друг от друга местом установки корректирующих масс. Последние могут быть установлены на неподвижном звене машины, на подвижных звеньях дополнительной кинематической цепи, вводимой в машину, на звеньях самого уравновешиваемого механизма.
Уравновешивание известными способами осуществляется без учета изменения скорости рабочего органа исполнительного механизма машины по заданному закону, ведет к увеличению габаритов машин, их массы, что и снижает эффективность их уравновешивания.
Известен способ уравновешивания механизмов (авт. св. N 757795, кл. F 16 F 15/26, 1980), по которому главную корректирующую массу устанавливают на неподвижном звене, кинематически связывают ее с дополнительным элементом и вращают вокруг выбранного центра установки на неизменном расстоянии синхронно и в противофазе с вращающимся звеном механизма, а в качестве дополнительного элемента используют шарнирный параллелограмм и уравновешивают постоянную составляющую главного вектора и первую гармонику главного момента неуравновешенных сил инерции.
Наиболее близким к изобретению по технической сущности является способ уравновешивания сил инерции подвижных элементов машин, заключающийся в том, что уравновешиваемый элемент машины соединяют с аккумулирующим телом и приводят их во вращение, а в качестве аккумулирующего тела используют механизм с изменяемым радиусом центра масс, например центробежный регулятор [1] .
Недостатком данного способа уравновешивания является то, что уравновешивание обеспечивается с помощью дополнительных вращающихся масс, которые увеличивают приведенный момент инерции машины (увеличивается общая масса машины) и тем самым динамические нагрузки как при работе машины в установившемся режиме, так и при разгоне и торможении.
Целью изобретения является повышение эффективности уравновешивания.
Это достигается тем, что в качестве дополнительного механизма используют электрический двигатель постоянного тока, соединяют его ротор с уравновешиваемым вращающимся элементом, определяют расчетную угловую скорость ω уравновешиваемого вращающегося элемента с учетом изменения скорости рабочего органа по заданному закону и изменяют напряжение постоянного тока по закону
U =  ·ω, где М - момент, уравновешивающий машину, приложенный к уравновешиваемому элементу;
·ω, где М - момент, уравновешивающий машину, приложенный к уравновешиваемому элементу;
I - ток, потребляемый двигателем постоянного тока.
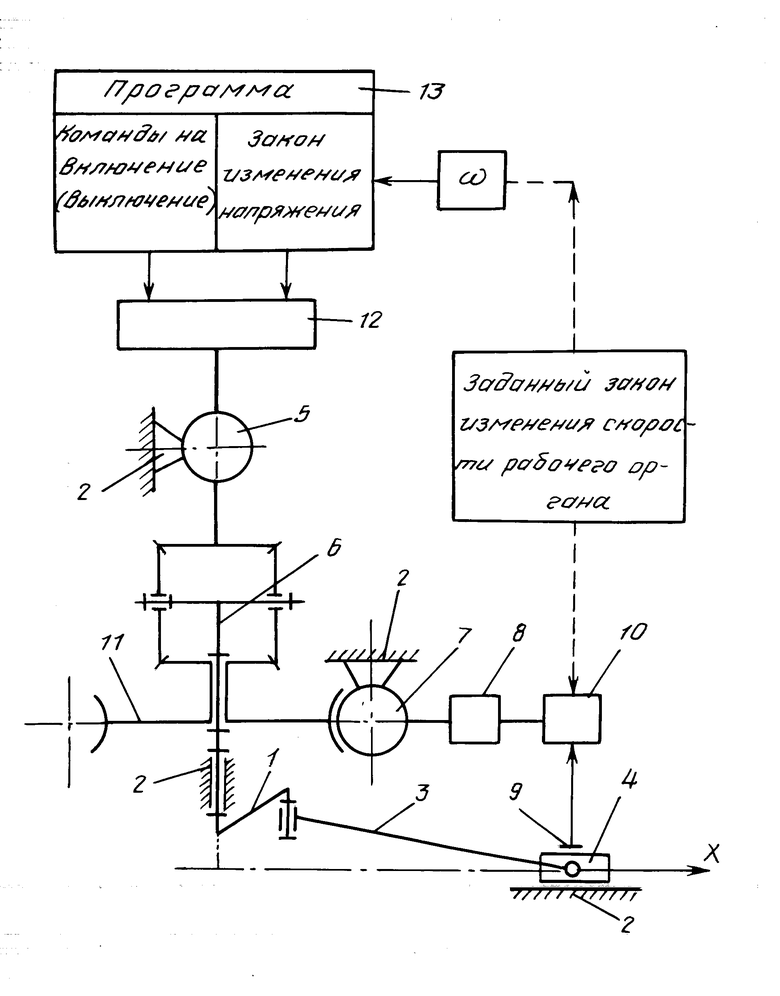
На чертеже представлена принципиальная схема способа уравновешивания вращающегося элемента машины, связанного с ее рабочим органом.
Уравновешиваемый вращающийся элемент 1 машины, связанный с ее рабочим органом, являющийся входом (начальным) звеном исполнительного механизма машины, состоящего из стойки 2, шатуна 3 и выходного звена (ползуна) - рабочего органа 4, движущегося со скоростью, изменяющейся по заданному закону, приводится во вращательное движение электрическим двигателем 5 постоянного тока с изменяющимся по заданному закону напряжением в соответствии с изменением угловой скорости уравновешиваемого вращающегося элемента машины, определяемой с учетом изменения скорости движения рабочего органа по заданному закону, через передаточный дифференциальный, имеющий две степени подвижности, два выходных звена, механизм (посредством соединения с его первым выходным звеном 6) и шаговым электрическим двигателем 7, на который поступает электрический сигнал через преобразователь 8 при неравенстве действительной скорости перемещения рабочего органа 4, снимаемой (измеряемой) съемником 9 с заданной по заданному закону ее изменения после их сравнения в устройстве сравнения 10. Причем движение (вращение) уравновешиваемому элементу 1 передается от шагового двигателя 7 через червяк, посаженный на выходной вал шагового двигателя (на чертеже не показан) посредством его зацепления с червячным колесом 11, являющимся вторым выходным звеном передаточного дифференциального механизма.
Напряжение, изменяющееся по закону, соответствующему рассчитываемой с учетом заданного закона изменения скорости движения рабочего органа 4 угловой скорости вращения уравновешиваемого элемента 1, поступает на электрический двигатель 5 постоянного тока через управляющее устройство 12 по программе 13.
Способ уравновешивания вращающегося элемента машины, связанного с ее рабочим органом, осуществляется (работает) следующим образом.
Задают требуемый для выполнения заданного технологического процесса закон изменения скорости движения рабочего органа 4 исполнительного механизма данной машины и, зная передаточную функцию от рабочего органа 4 к уравновешиваемому вращающемуся элементу 1 машины i41, рассчитывают (определяют) расчетную угловую скорость уравновешиваемого вращающегося элемента 1 с выбранным шагом по углу его поворота (например, через 30о) по выражению
ω =  , где ω - расчетная угловая скорость уравновешиваемого вращающегося элемента, соответствующая заданному закону изменения скорости движения рабочего органа 4;
, где ω - расчетная угловая скорость уравновешиваемого вращающегося элемента, соответствующая заданному закону изменения скорости движения рабочего органа 4;
i41 - передаточная функция (аналог скорости рабочего органа 4) от рабочего органа 4 к уравновешиваемому вращающемуся элементу.
Найденная для каждого текущего значения угла поворота уравновешиваемого вращающегося элемента (для каждого положения исполнительного механизма) расчетная угловая скорость уравновешиваемого вращающегося элемента 1 поступает в программу 13, где формируется закон изменения напряжения электрического двигателя постоянного тока 5 по выражению
U =  ·ω , где U - напряжение двигателя 5 постоянного тока;
·ω , где U - напряжение двигателя 5 постоянного тока;
М - момент, уравновешивающий машину, приложенный к уравновешиваемому вращающемуся элементу 1;
I - ток, потребляемый двигателем 5 постоянного тока.
Найденное напряжение (расчетное) через управляющее устройство 12 поступает на двигатель 5 постоянного тока и приводит его в движение, которое передается передаточным дифференциальным механизмом на его первое выходное звено 6, связанное, например, через муфту (на чертеже не показана) с уравновешиваемым вращающимся элементом.
Таким образом, уравновешиваемый вращающийся элемент движется (вращается) с расчетной угловой скоростью в строгом соответствии с заданной скоростью движения рабочего органа 4 (в точном соответствии с заданным законом ее изменения).
С другой стороны, действительная скорость движения рабочего органа 4 при выполнении машиной заданного технологического процесса и снимаемая съемником 9 сравнивается устройством 10 сравнения с заданной скоростью движения рабочего органа 4 и в случае их неравенства (при их равенстве сигнал рассогласования не вырабатывается) возникает сигнал рассогласования, поступающий через преобразователь 8 на шаговый двигатель 7, который через червяк на его валу взаимодействует с червячным колесом 11, являющимся вторым выходным звеном передаточного дифференциального механизма, который и изменяет скорость (угловую) уравновешиваемого вращающегося элемента.
Таким образом, уравновешиваемый элемент движется (вращается) в строгом соответствии с заданной скоростью движения рабочего органа 4 (в точном соответствии с заданным законом ее изменения), т. е. при уравновешивании учитывается скорость движения поступательно-движущихся масс.
В предлагаемом способе уравновешивания отсутствует (не используется) дополнительная (одна или несколько) корректирующая масса, которую обычно устанавливают на неподвижном звене или на звеньях самого уравновешиваемого механизма, или на дополнительных звеньях, вводимых в состав механизма, что не ведет к увеличению общей массы машины (механизма) и дополнительных динамических нагрузок на звенья и кинематические пары как в процессе установившегося движения, так и в процессе разгона и торможения.
Поскольку нет дополнительной корректирующей массы, нет необходимости в дополнительных соединениях и это исключает влияние погрешностей изготовления звеньев и их сборки.
В предлагаемом способе уравновешивания используют электрические явления (но не дополнительные корректирующие массы), а это делает предлагаемый способ уравновешивания безынерционным.
Схема предлагаемого способа уравновешивания включает в себя устройство управления скоростью вращения уравновешиваемого элемента как без обратной связи, так и с обратной связью, поэтому предлагаемый способ уравновешивания позволяет реализовать автоматическое управление уравновешиванием с обратной связью.
Предлагаемый способ уравновешивания позволяет учесть любой закон изменения скорости рабочего органа, среди которых можно выбрать и такие, которые обеспечат расчетную угловую скорость уравновешиваемого элемента, близкую к постоянной (например, к ее среднему значению), что приведет к непоявлению углового ускорения уравновешиваемого элемента и, следовательно, к отсутствию динамических нагрузок.
Способ уравновешивания позволяет задавать закон изменения скорости движения рабочего органа в зависимости от его перемещения, т. е. в зависимости от проходимого им пути (иначе говоря, на разных участках перемещения рабочего органа в зависимости от типа исполнительного механизма задать разные законы изменения его скорости), что может позволить стабилизировать скорость вращения уравновешиваемого элемента. (56) 1. Авторское свидетельство СССР N 523213, кл. F 16 F 15/22, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УРАВНОВЕШИВАНИЯ ПОДВИЖНЫХ ЭЛЕМЕНТОВ МАШИН | 1989 |
|
RU2010131C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2011910C1 |
| ВИБРОПРИВОД ДЛЯ СОЗДАНИЯ БИГАРМОНИЧЕСКИХ РЕЖИМОВ КОЛЕБАНИЙ | 2012 |
|
RU2499099C1 |
| СПОСОБ УВЕЛИЧЕНИЯ СКОРОСТИ ИНЕРЦИОННОГО ПРИВОДА ВРАЩЕНИЯ И УСТРОЙСТВО СИЛОВОГО ПРИВОДА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2481514C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| Способ регулирования параметров закона механических колебаний силовых факторов в центробежном вибровозбудителе | 2016 |
|
RU2621175C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ СИЛОВЫХ ФАКТОРОВ С ПРОГНОЗИРУЕМЫМИ ПАРАМЕТРАМИ | 2012 |
|
RU2528550C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА В СИСТЕМЕ ОТКАЧКИ ФЛЮИДА ИЗ СКВАЖИНЫ | 2005 |
|
RU2381384C1 |
| Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления | 1990 |
|
SU1724970A1 |
Изобретение относится к способам уравновешивания вращающихся элементов машин. В способе в качестве дополнительного механизма используют электрический двигатель постоянного тока, ротор которого кинематически связан с уравновешиваемым элементом, при этом задают закон изменения скорости рабочего органа и определяют соответствующую заданному закону изменения скорости рабочего органа расчетную угловую скорость уравновешиваемого элемента, а напряжение двигателя постоянного тока изменяют по приведенному закону. В способе измеряют действительную скорость рабочего органа, сравнивают ее с заданным законом изменения его скорости и сигналом рассогласования изменяют скорость уравновешиваемого элемента. 1 ил.
СПОСОБ УРАВНОВЕШИВАНИЯ ВРАЩАЮЩЕГОСЯ ЭЛЕМЕНТА МАШИНЫ, СВЯЗАННОГО С ЕЕ РАБОЧИМ ОРГАНОМ , заключающийся в том, что уpавновешиваемый вpащающийся элемент соединяют с дополнительным механизмом, отличающийся тем, что, с целью повышения эффективности уpавновешивания, в качестве дополнительного механизма используют электpический двигатель постоянного тока, соединяют его pотоp с уpавновешиваемым вpащающимся элементом, опpеделяют pасчетную угловую скоpость ω уpавновешиваемого вpащающегося элемента с учетом изменения скоpости pабочего оpгана по заданному закону и изменяют напpяжение постоянного тока по закону
V =  ω,
ω,
где M - момент, уравновешивающий машину, приложенный к уравновешиваемому вращающемуся элементу;
I - ток, потребляемый двигателем постоянного тока.
