Изобретение относится к инерционным системам накопления и преобразования энергии и может быть использовано, в частности, для привода различных машин (механизмов), транспортных средств.
Известны устройства в виде передач вращения с аккумулированием и повторной отдачей энергии, в которых для этого используется вращение неуравновешенных масс (например: пат. DE №2612035, опубл. 29.09.1977; пат. FR №1588205, опубл. 10.04.1970; пат. US №3960036, опубл. 01.06.1976; пат. US №4498357, опубл. 12.02.1985).
Недостатком известных технических решений является то, что в них двигатель, предназначенный для вращения неуравновешенных масс (дебалансов), установлен за пределами вращающейся платформы (или основания) с дебалансами и рабочим (ведущим) звеном. По этой причине механический момент сопротивления нагрузки, приложенный к рабочему звену, воздействует в конечном счете и на вал привода дебалансов.
Известен способ работы силового привода вращения с использованием механизма прерывистого движения, содержащего рабочее звено, согласно которому с помощью источника механических колебаний создают знакопеременный момент вращения и прикладывают его к рабочему звену, выполненному с возможностью вращения, причем в качестве источника колебаний применяют центробежный вибратор в виде не менее одного элемента с неуравновешенной массой, который свободно вращают двигателем аксиально рабочему звену с заданной частотой, при этом двигатель и элемент с неуравновешенной массой устанавливают на рабочем звене, а в механизме прерывистого движения используют, по меньшей мере, одну обгонную муфту.
Вариантом реализации указанного способа является электростанция, содержащая электрогенератор, силовой привод для его вращения и устройство управления, причем силовой привод содержит основание, на котором установлен по крайней мере первый узел, выполненный с возможностью одностороннего вращения и содержащий ведущее звено для передачи рабочего момента, задающий привод, включающий двигатель с механизмом передачи вращения не менее чем одному элементу с неуравновешенной массой на оси, расположенной на первом узле аксиально вращению ведущего звена, при этом кинематическая цепь между ведущим звеном и конечным ведомым звеном содержит второй узел, выполненный с возможностью передачи рабочего момента в одном направлении (пат. RU №2377458, опубл. 20.08.2009).
Данный способ и устройство, предназначенное для его осуществления, являются наиболее близкими аналогами как по назначению, так и по технической сущности.
Существенным недостатком известного способа и устройства для его осуществления является принципиальная невозможность получения высоких значений скорости вращения рабочего (ведущего) звена. Это ограничивает область применения известного изобретения-прототипа. Его невозможно использовать в качестве прямого привода, например, колес транспортного средства. Можно привести другой, наглядный пример численного сравнения скорости прототипа и, например, вентилятора. Предположим, что амплитуда крутильных колебаний ведущего звена составляет 0,013 радиан. На радиусе 0,15 м она будет порядка 2 мм. Выбранное значение амплитуды является большой величиной для промышленного оборудования, которое подвергается вибрации. Угловая скорость колебаний при такой амплитуде на частоте 50 Гц составляет 4 радиан/сек, а, например, промышленный вентилятор на частоте 50 Гц имеет угловую скорость 314 радиан/сек, что значительно превышает возможности известного прототипа.
Задачей заявляемого изобретения является увеличение скорости вращения рабочего (ведущего) звена инерционного привода вращения.
Поставленная задача решается предлагаемым способом увеличения скорости инерционного привода вращения с использованием рабочего звена, содержащего источник вращения в виде элемента с неуравновешенной массой, который свободно вращают двигателем аксиально оси вращения рабочего звена с заданной частотой, при этом радиус инерции Ri неуравновешенной массы элемента выполняют в соответствии с выражением
Ri>2r,
где r - радиальное расстояние между геометрическими осями вращений.
Поставленная задача решается также предлагаемым устройством для осуществления заявляемого способа увеличения скорости инерционного привода вращения, содержащим неподвижную ось, на которой с возможностью вращения выполнена платформа, содержащая ведущее звено и задающий привод, включающий двигатель с возможностью передачи вращения элементу с неуравновешенной массой на оси, выполненной на платформе аксиально неподвижной оси, при этом неуравновешенная масса выполнена на периферии элемента, а ее радиус инерции превышает удвоенное радиальное расстояние между указанными осями, причем ось вращения элемента с неуравновешенной массой и плоскость его вращения расположены с одной стороны плоскости платформы, а с противоположной стороны этой плоскости выполнено соединение платформы с неподвижной осью с возможностью вращения.
Заявляемое решение позволяет выполнить радиус инерции неуравновешенной массы любой необходимой величины.
При этом элемент с неуравновешенной массой может быть выполнен в виде несимметричного или симметричного рычага, на одном конце которого закреплен неуравновешенный груз.
В частных случаях осуществления элемент может быть выполнен в виде диска, кольца или обруча, на периферийной части которого выполнена неуравновешенная масса.
При этом платформа может быть соединена с неподвижной осью посредством обгонной муфты.
Муфта предназначена для защиты устройства от удара противоположным моментом силы инерции неуравновешенной массы в случае, если угловая скорость вращения элемента превысит угловую скорость платформы.
При этом элемент с неуравновешенной массой может быть соединен с аксиальной осью через обгонную муфту. Такое решение позволяет улучшить равномерность вращения неуравновешенной массы.
Платформа может быть снабжена приспособлением, предназначенным для ее уравновешивания относительно неподвижной оси. В частном случае, в качестве приспособления для уравновешивания может быть использован статический груз.
При этом платформа может быть снабжена кожухом, предназначенным для предотвращения разлета осколков в случае аварийного разрушения устройства.
При этом устройство может быть снабжено контроллером, предназначенным для ручного или автоматического управления скоростью элемента с неуравновешенной массой.
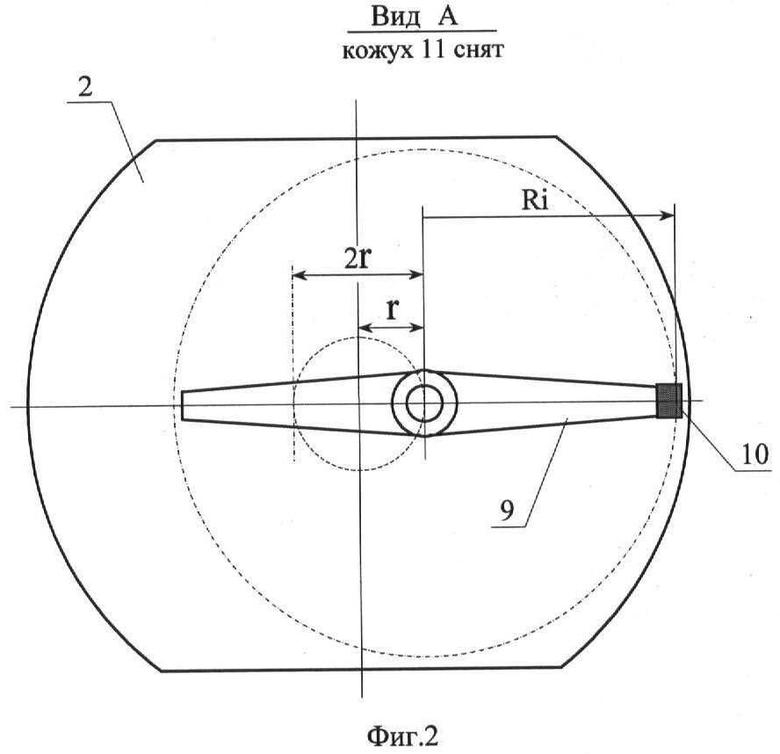
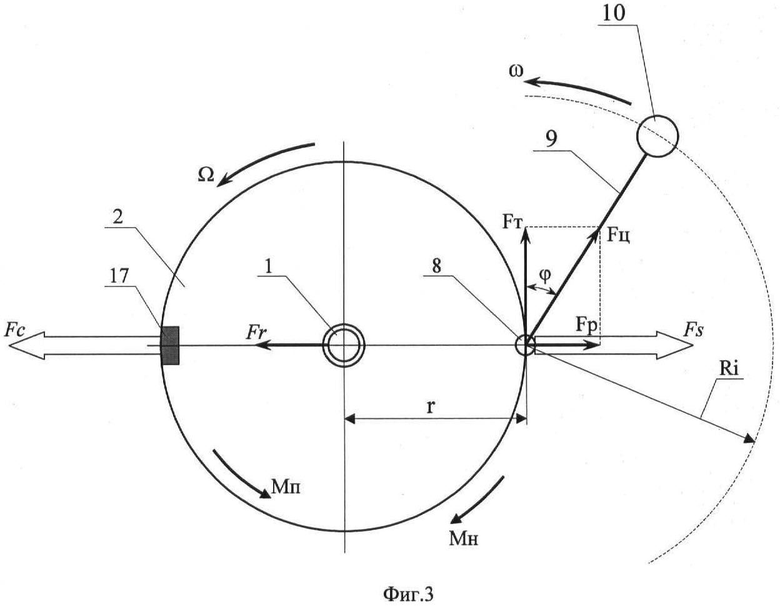
Сущность изобретения поясняется чертежами, на которых изображены: фиг.1 - фронтальный разрез общего вида устройства; фиг.2 - вид на фиг.1 по стрелке A; фиг.3 - пояснительная схема.
Введены следующие цифровые обозначения: 1 - неподвижная ось; 2 - платформа; 3 - ведущее звено (цепная звездочка); 4 - электродвигатель; 5 - ось электродвигателя 4; 6 - ведущая шестерня; 7 - ведомая шестерня; 8 - аксиальная ось; 9 - рычаг; 10 - масса, неуравновешенная относительно оси 8; 11 - кожух; 12÷14 -подшипники; 15 - обгонная муфта; 16 - щеточный узел; 17 - уравновешивающий груз; 18 - узел соединения платформы 2 с осью 1 и ведущим звеном 3; 19 - фундамент.
Кроме того, введены следующие буквенные обозначения: Ω - угловая скорость вращения платформы 2 и ведущего звена 3 вокруг оси 1; ω - угловая скорость вращения элемента (рычаг 9) с неуравновешенной массой 10 вокруг оси 8; Fц - центробежная сила, создаваемая массой 10, приложенная к оси 8; Fт и Fp - соответственно тангенциальная и радиальная проекции силы Fц на касательную и радиальную оси, связанные с осью 8 и вращающиеся вместе с ней вокруг оси 1; φ - угол между векторами сил Fц и Fт; Fs - центробежная сила массы элементов конструкции (шестерни 6 и 7, ось 8, крепеж); Fc - центробежная сила уравновешивающего груза 17; Fr - реакция оси 1 на действие радиальной силы Fp; Ri - радиус инерции неуравновешенной массы 10; Мп - момент привода на ведущем звене 3; Мн - момент нагрузки, приложенный к ведущему звену 3; r - расстояние между осями 1 и 8.
Предлагаемое устройство для осуществления способа увеличения скорости инерционного привода вращения содержит неподвижную ось 1, в частном случае жестко закрепленную на фундаменте 19, платформу 2 с возможностью вращения на оси 1. Для этого платформа 2 соединена с осью 1 посредством узла 18 с подшипником 14 и обгонной муфтой 15. На платформе 2 выполнен задающий привод, состоящий из электродвигателя 4, шестерен 6 и 7, оси 8, рычага 9 и неуравновешенной массы 10. Ось 5 электродвигателя 4 соединена с шестерней 6, которая находится в зацеплении с ведомой шестерней 7, соединенной с осью 8, на которой закреплен рычаг 9 (в частном случае используется рычаг, симметричный относительно оси 8). На одном конце рычага 9 закреплена масса 10. Радиус рычага 9 и конфигурация массы 10 выполняют таким образом, чтобы радиус инерции Ri массы 10 (без массы рычага) удовлетворял условию: Ri>2r, где r - радиальное расстояние между осями 1 и 8 (см. фиг.3).
На платформе 2 выполнен груз 17, предназначенный для ее уравновешивания относительно оси 1. Электродвигатель 4 через контакты щеточного узла 16 подключен к контроллеру, предназначенному для управления частотой вращения его ротора и соответственно для управления частотой вращения рычага 9 с неуравновешенной массой 10 относительно оси 8. Устройство может быть также снабжено контроллером, предназначенным для ручного или автоматического управления скоростью вращения элемента с неуравновешенной массой (на чертежах не показан).
Способ увеличения скорости инерционного привода вращения осуществляют с использованием предлагаемого устройства следующим образом. Включают электродвигатель 4. Его ось 5, а с ней шестерни 6 и 7, ось 8, рычаг 9 с неуравновешенной массой 10 начинают вращаться. При этом платформа 2 вместе с ведущим звеном 3 тоже начинают вращаться в одном направлении с рычагом 9. Масса 10 создает центробежную силу

где m - величина массы 10.
Ее тангенциальная проекция равна

Момент привода на ведущем звене 3 равен

К ведущему звену 3 одновременно приложен противодействующий момент нагрузки Мн. До тех пор, пока момент привода больше момента нагрузки
Мп>Мн,
на один оборот рычага 9 вокруг оси 8, платформа 2 (и ведущее звено 3) также совершает один оборот вокруг оси 1:ω=Ω.
При этом, если величина момента нагрузки Мн увеличивается, стремясь к величине момента привода Мп, то угол φ стремится к нулю: φ→0.
В том случае, если момент нагрузки по какой-либо причине становится больше момента привода Мн>Мп, тогда угловая скорость ω рычага 9 начинает превышать угловую скорость Ω платформы 2: (ω>Ω). При этом тангенциальный вектор силы Fт меняет свое направление на противоположное. Такой режим работы устройства в предлагаемом способе считается аварийным, поэтому не должен допускаться автоматическими средствами и обслуживающим персоналом. В последнем случае для защиты инерционных элементов кинематической цепи ведущее звено 3 (нагрузка от встречного удара) служит обгонная муфта 15.
Предлагаемое устройство имеет динамически несимметричную схему, поэтому неуравновешенная радиальная нагрузка приложена к оси 1, а через нее - к фундаменту 19. Эта нагрузка на работу устройства не влияет. Она лишь увеличивает износ подшипников на оси 1.
Уравнение баланса радиальных сил можно записать следующим образом:

Отсюда реакция Fr оси 1 равна:

Таким образом, для номинальной частоты ω=Ω вращения платформы 2 возможно подобрать такое значение массы уравновешивающего груза 17, для которого выражение (5) обращается в ноль.
Устройство для осуществления заявляемого способа работоспособно и без обгонной муфты 15. В этом случае при включении электродвигателя 4 платформа 2 сначала совершает несколько колебаний на одном месте, а затем (при дальнейшем увеличении скорости вращения рычага 9) начинает вращаться в одном направлении с рычагом 9.
Таким образом, техническим результатом заявляемого способа и устройства для его осуществления является возможность увеличения скорости инерционного привода вращения, вследствие чего предлагаемое изобретение может быть широко использовано при изготовлении быстроходных силовых приводов, например, для вентиляторов, для колесных транспортных средств и других устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ПРИВОД ВРАЩЕНИЯ | 2012 |
|
RU2552765C2 |
| СПОСОБ РАБОТЫ СИЛОВОГО ПРИВОДА ВРАЩЕНИЯ И ЭЛЕКТРОСТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377458C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2604908C2 |
| СИЛОВОЙ ПРИВОД | 2012 |
|
RU2514958C2 |
| Способ и устройство для подледной ловли рыбы | 2015 |
|
RU2663333C2 |
| САМОХОДНАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ СТАНЦИЯ - ЛЕТУЧИЙ БАРХАН | 2005 |
|
RU2353800C2 |
| ПРИВОД ПЕРЕДНЕГО КОЛЕСА МОТОЦИКЛА | 2014 |
|
RU2559857C1 |
| УНИПОЛЯРНЫЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 2014 |
|
RU2546970C1 |
| Инерционно-импульсный привод | 1976 |
|
SU668397A1 |
| Динамическая автоматическая муфта сцепления | 1991 |
|
SU1831608A3 |
Изобретение относится к инерционным системам накопления и преобразования энергии и может быть использовано для привода различных машин и транспортных средств. Способ направлен на увеличение скорости инерционного привода вращения относительно неподвижной оси с использованием инерционного элемента с неуравновешенной массой, который вращают двигателем вокруг аксиальной оси. При этом расстояние от ее центра масс до аксиальной оси выполняют более чем в два раза больше, чем расстояние между осями вращения. Устройство силового привода для осуществления способа содержит платформу с возможностью вращения на неподвижной оси, содержащей ведущее звено и задающий привод, включающий двигатель с возможностью передачи вращения элементу с неуравновешенной массой на оси, выполненной аксиально неподвижной, при этом аксиальная ось и плоскость вращения элемента расположены с одной стороны плоскости платформы, а с другой стороны этой плоскости платформа соединена с неподвижной осью. 2 н. и 8 з.п. ф-лы, 3 ил.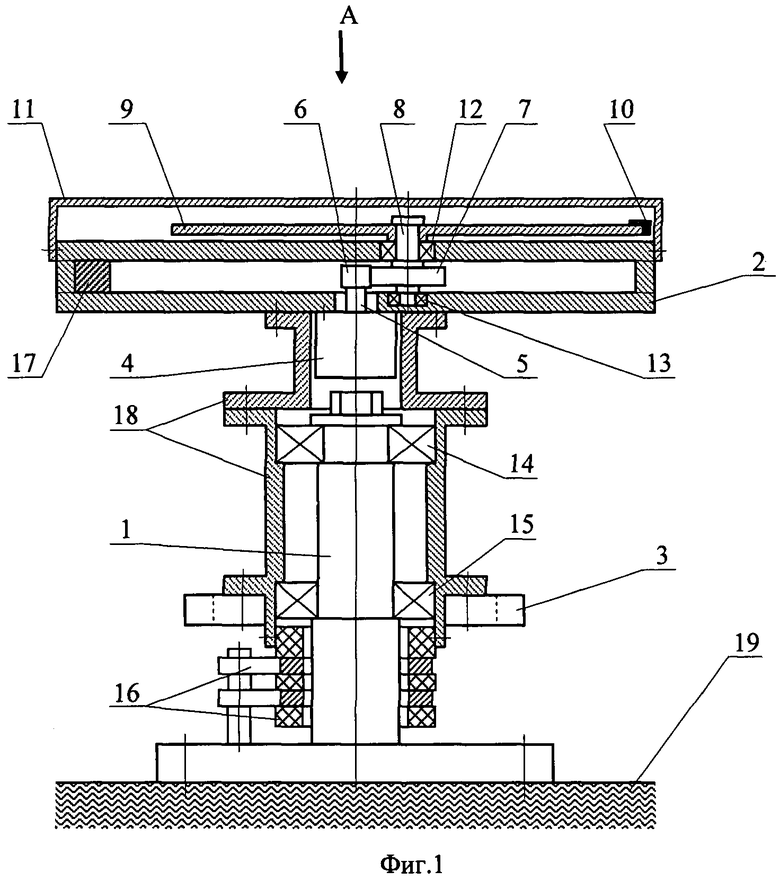
1. Способ увеличения скорости инерционного привода вращения, содержащего рабочее звено с источником вращения в виде элемента с неуравновешенной массой, который свободно вращают двигателем аксиально рабочему звену с заданной частотой, отличающийся тем, что расстояние Ri от центра масс неуравновешенной массы элемента до аксиальной оси выполняют в соответствии с выражением
Ri>2r,
где r - радиальное расстояние между осями вращений.
2. Устройство силового привода вращения, содержащего неподвижную ось, на которой с возможностью вращения выполнена платформа, содержащая ведущее звено и задающий привод, включающий двигатель с возможностью передачи вращения элементу с неуравновешенной массой на оси, выполненной на платформе аксиально неподвижной оси, отличающееся тем, что неуравновешенная масса выполнена на периферии элемента, при этом аксиальная ось вращения элемента с неуравновешенной массой и плоскость его вращения расположены с одной стороны плоскости платформы, а с противоположной стороны этой плоскости выполнено соединение платформы с неподвижной осью.
3. Устройство по п.2, отличающееся тем, что элемент выполнен в виде несимметричного или симметричного рычага, на одном конце которого закреплен неуравновешенный относительно аксиальной оси груз.
4. Устройство по п.2, отличающееся тем, что элемент выполнен в виде диска, кольца или обруча, на периферийной части которого выполнена неуравновешенная относительно аксиальной оси масса.
5. Устройство по п.2, отличающееся тем, что платформа соединена с неподвижной осью посредством обгонной муфты.
6. Устройство по п.2, отличающееся тем, что элемент с неуравновешенной массой соединен с аксиальной осью через обгонную муфту.
7. Устройство по п.2, отличающееся тем, что платформа снабжена приспособлением, предназначенным для ее уравновешивания относительно неподвижной оси.
8. Устройство по п.7, отличающееся тем, что в качестве приспособления для уравновешивания используют статический груз.
9. Устройство по п.2, отличающееся тем, что снабжено кожухом, предназначенным для предотвращения разлета осколков в случае аварийного разрушения устройства.
10. Устройство по п.2, отличающееся тем, что оно снабжено контроллером, предназначенным для ручного или автоматического управления скоростью вращения элемента с неуравновешенной массой.
| СПОСОБ РАБОТЫ СИЛОВОГО ПРИВОДА ВРАЩЕНИЯ И ЭЛЕКТРОСТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377458C2 |
| Инерционный привод | 1987 |
|
SU1484461A1 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 1999 |
|
RU2207256C2 |
| CN 101265964 А, 17.09.2008. | |||

