Изобретение относится к машиностроению, а именно к гидравлическим приводам, и может быть использовано в гидрооборудовании подъемно-транспортных средств для горизонтирования грузовой платформы, установленной на неподготовленной площадке.
Известны гидравлические приводы вывешивания и горизонтирования грузовой платформы, содержащие гидроопоры, установленные на платформе, соединенные гидролиниями с напорной и сливной магистралями через гидрораспределитель и гидрооборудование, обеспечивающее вывешивание и горизонтирование платформы (см. а. с. СССР N 657184 кл. F 15 В 11/22, 1979 г. ).
Такие гидроприводы содержат в своем составе дозатор, который имеет большие габариты и массу. Большие габариты и масса дозатора обусловлены тем, что он за счет своего возвратно-поступательного движения должен вытеснять объем рабочей жидкости, равный суммарному объему, потребляемому всеми гидроопорами во время осуществления процесса вывешивания и горизонтирования платформы. В связи с тем, что площадки, на которые может быть установлена платформа, имеют произвольную кривизну, объем дозатора рассчитывают под самый неблагоприятный случай, а это еще больше увеличивает его габариты и массу. Кроме этого, данный гидропривод во время осуществления процесса вывешивания и горизонтирования работает рывками, потому что золотники горизонтирования, входящие в его состав, не обеспечивают плавного переключения режимов нагнетания и слива. Из-за этого в гидрооборудовании и во всем механизме возникают большие динамические нагрузки, которые ведут к частым поломкам и отрицательно сказываются на сроке эксплуатации механизма.
Наиболее близким техническим решением, выбранным в качестве прототипа, является гидравлический привод вывешивания и горизонтирования грузовой платформы, который содержит гидроопоры, установленные на платформе, соединенные гидролиниями с напорной и сливной магистралями через гидрораспределитель, гидроуправляемые обратные клапаны, каждый из которых установлен в гидролинию, соединенную с поршневой полостью гидроопоры.
Этот гидравлический привод тоже содержит в своем составе достаточно громоздкий дозатор, хотя и несколько меньших размеров. Габариты и масса дозатора уменьшены за счет исключения его работы во время процесса горизонтирования платформы. Во всем остальном он имеет те же недостатки. Он также работает рывками во время процесса горизонтирования платформы, потому что его золотники горизонтирования тоже не обеспечивают плавного переключения режимов нагнетания и слива. Из-за этого в гидросистеме и во всем механизме возникают большие динамические нагрузки, что, как и в предыдущем случае, ведет к частым поломкам и снижению срока эксплуатации механизма.
Целью настоящего изобретения является уменьшение габаритов и массы, а также повышение плавности работы гидравлического привода.
Указанная цель достигается тем, что известный гидравлический привод вывешивания и горизонтирования грузовой платформы, содержащий установленные на последней гидроопоры, с полостями рабочего и холостого хода, сообщенными через гидрораспределитель с напором и сливом, гидрозамки, установленные в магистралях, подключенных к полостям рабочего хода, и обводные гидролинии с установленными в них дросселями, подключенные с одной стороны к полостям рабочего хода гидроопор, снабжен гидроуправляемым двухпозиционным нормально открытым клапаном с пружинным возвратом, установленным в магистрали, сообщающей выход гидрораспределителя со входами гидрозамков, полость управления которого сообщена с его входом, и обратными клапанами, установленными в обводных линиях между полостями рабочего хода и дросселями, сообщенными со входом гидроуправляемого клапана, при этом орган управления каждого дросселя, закрепленного на платформе, выполнен с возможностью взаимодействия с маятником, шарнирно закрепленным на платформе.
Указанная конструкция позволяет уменьшить габариты и массу, а также повысить плавность работы гидравлического привода за счет того, что поршневые полости гидроопор соединены с гидрораспределителем дополнительными обводными гидролиниями через регулируемые нормально закрытые дроссели, которые прикреплены к платформе, причем орган управления каждым из них соединен с шарнирно установленным на платформе маятником, и за счет того, что в гидролинию, соединенную с гидрораспределителем и гидроуправляемыми клапанами, установлен дополнительный гидроуправляемый нормально открытый двухпозиционный с пружинным возвратом клапан, полость управления которым соединена с этой же гидролинией.
Сопоставительный анализ с прототипом показывает, что предлагаемый гидравлический привод вывешивания и горизонтирования грузовой платформы отличается тем, что, во-первых, в кинематическую схему гидропривода введены новые дополнительные элементы, которые установлены в новом месте и имеют новые кинематические связи - регулируемые нормально закрытые дроссели прикреплены к платформе, причем орган управления каждым из них соединен с шарнирно установленным на платформе маятником; во-вторых, в гидравлическую схему введены новые дополнительные гидравлические связи, в которые установлены новые гидравлические элементы - поршневые полости гидроопор соединены с гидрораспределителем дополнительными обводными гидролиниями через регулируемые нормально закрытые дроссели; в-третьих, в новом месте гидравлической схемы установлен новый дополнительный элемент, подключенный по-новому - в гидролинию, соединенную с гидрораспределителем и гидроуправляемыми обратными клапанами, установлен дополнительный гидроуправляемый нормально открытый двухпозиционный с пружинным возвратом клапан, полость управления которым соединена с этой же гидролинией. Таким образом, предлагаемый гидравлический привод вывешивания и горизонтирования грузовой платформы соответствует критерию изобретения "новизна".
Сравнение предлагаемого решения не только с прототипом, но и с другими аналогами в данной области техники не выявило в них признаки, отличающие предлагаемое решение от прототипа, что позволяет сделать вывод о соответствии критерию изобретения "существенные отличия".
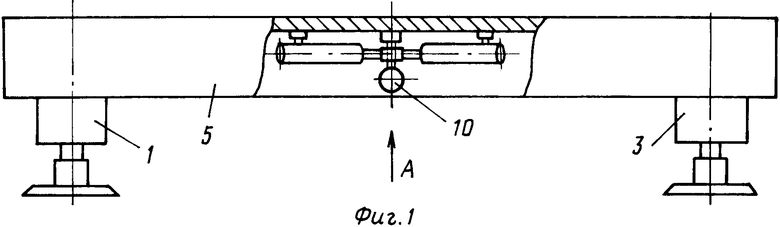
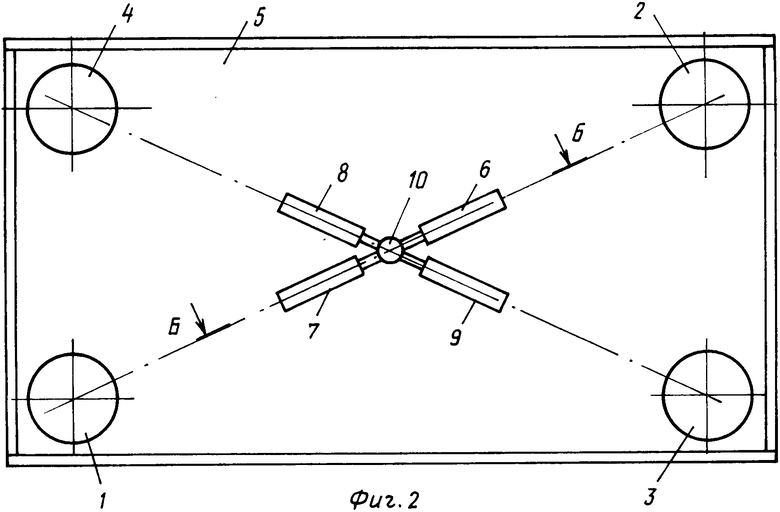
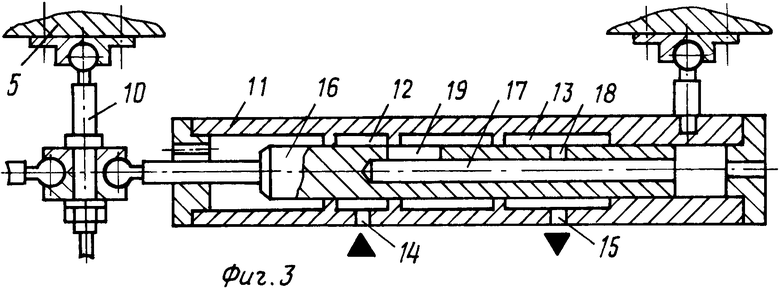
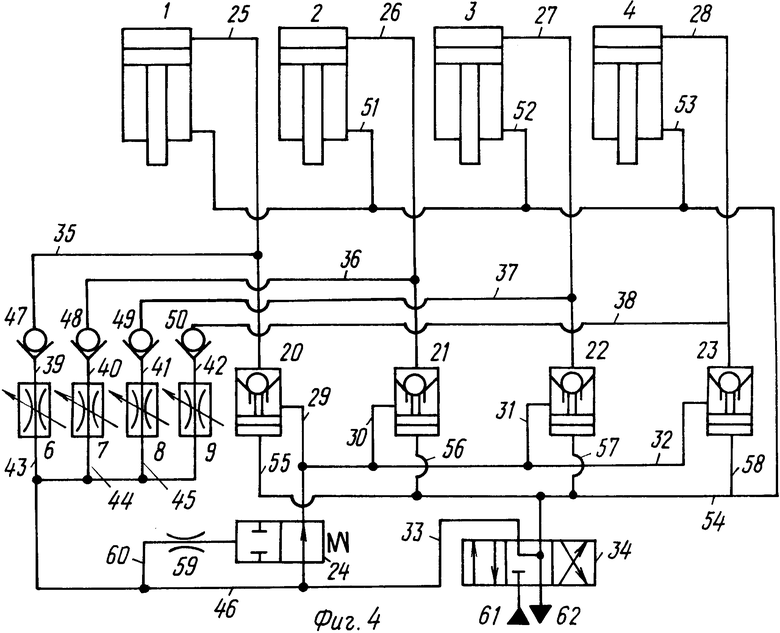
На фиг. 1 представлен предлагаемый гидравлический привод; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - принципиальная гидравлическая схема.
Гидравлический привод состоит из гидроопор 1,2,3,4, установленных на платформе 5. К платформе 5 на каждой диагонали, проходящей через центр соответствующих двух гидроопор, посредством сферических шарниров установлено по два регулируемых нормально закрытых дросселя 6,7,8,9. Причем, каждый дроссель установлен на одинаковом расстоянии от точки пересечения диагоналей, а количество дросселей соответствует количеству гидроопор. Орган управления каждого из дросселей 6,7,8,9 посредством сферического шарнира соединен с маятником 10. В точке пересечения указанных диагоналей посредством сферического шарнира маятник 10 прикреплен к платформе 5. Каждый дроссель состоит из корпуса 11, в котором выполнены радиальные проточки 12, 13, соединенные соответственно, с каналами 14, 15, золотника 16 с нулевым перекрытием, в котором выполнены каналы 17, 18 и продольная дроссельная щель 19. Полости рабочего хода гидроопор 1,2,3,4 через соответствующие гидроуправляемые обратные клапаны 20, 21, 22, 23, через гидроуправляемый нормально открытый двухпозиционный с пружинным возвратом клапан 24 посредством соответствующих гидролиний 25-33 соединены с гидрораспределителем 34. Кроме этого, полости рабочего хода гидроопор 1,2,3,4 соединены с гидрораспределителем 34 еще и обводными гидролиниями 35-46 через соответствующие обратные клапаны 47, 48, 49, 50 и регулируемые нормально закрытые дроссели 6,7,8,9. Полости холостого хода гидроопор 1,2,3,4 посредством соответствующих гидролиний 51-54 соединены с гидрораспределителем 34. Полости управления клапанов 20, 21, 22, 23 гидролиниями 55-58 соединены с гидролинией 54. Полость управления клапана 24 через дроссель 59 посредством гидролиний 46, 60 соединена с гидролинией 33. Гидрораспределитель 34 соединен с напорной 61 и сливной 62 магистралями.
Предложенный гидравлический привод работает следующим образом.
Маятник 10 под действием гравитационной силы всегда стремится занять вертикальное положение. Если платформа 5 лежит в горизонтальной плоскости, то маятник 10 перпендикулярен ей, а дроссели 6,7,8,9 находятся в закрытом состоянии. Если же платформа 5 наклонена, то и маятник 10 по отношению к ней занимает наклонное положение. Но так как золотники 16 соединены с маятником 10, то они относительно корпусов 11 занимают соответствующее направлению и величине этого наклона положение. Другими словами, одни из них выдвинуты, а другие задвинуты. Те дроссели, золотники которых выдвинуты, переходят в открытое состояние за счет того, что в это время часть дроссельной щели 19 находится в проточке 12. Причем, чем больше угол наклона платформы 5 в сторону той или иной гидроопоры, тем больший участок дроссельной щели 19 соответствующего дросселя находится в проточке 12, а следовательно, тем больший расход рабочей жидкости может пропустить сквозь себя дроссель. А те дроссели, золотники которых задвинуты, остаются в закрытом состоянии, так как щель 19 переместится в противоположную от проточки 12 сторону.
При переключении гидрораспределителя 34 в левую позицию полости рабочего хода гидроопор 1,2,3,4 через клапан 24, соответствующие клапаны 20, 21, 22, 23 посредством соответствующих гидролиний 25-33 сообщаются с напорной магистралью 61, а полости холостого хода посредством соответствующих гидролиний 51-54 сообщаются со сливной магистралью 62. Происходит холостой ход гидроопор 1,2,3,4 вниз. В этом время в полостях рабочего хода гидроопор 1,2,3,4, а следовательно, и в гидролинии 60 возникает небольшое по величине давление, обусловленное трением движущихся частей гидроопор 1,2,3,4. После достижения одной из гидроопор поверхности площадки, на которую устанавливается платформа 5, она останавливается, а другие гидроопоры продолжают свое холостое перемещение. При этом давление в полостях рабочего хода гидроопор 1,2,3,4 и в гидролинии 60 останется на прежнем уровне. После того, как все гидроопоры 1,2,3,4 достигнут поверхности площадки, в полостях рабочего хода, а следовательно, в гидролинии 60 и в полости управления клапана 24 происходит резкое повышение давления, обусловленное массой платформы 5. Клапан 24 под действием высокого давления, превозмогая силу своей пружины, переходит в запертое положение. Если платформа 5 наклонена к горизонтальной плоскости, то дроссели 6,7,8,9 находятся в соответствующем этому наклону состоянии (одни из них открыты больше, другие - меньше, третьи - закрыты в зависимости от направления и величины наклона платформы 5). Рабочая жидкость по гидролиниям 33, 43-46 поступает на вход дросселей 6,8,7,9. Затем через каналы 14 открытых дросселей, проточки 12, через открытые участки дроссельных щелей 19, каналы 17, 18, проточки 13, каналы 15, через соответствующие обратные клапаны 47, 48, 49, 50 посредством соответствующих гидролиний 25-28, 35-42 рабочая жидкость продолжает поступать в полости рабочего хода соответствующих гидроопор 1,2,3,4. Происходит дальнейшее перемещение гидроопор 1,2,3,4 вниз. Причем те гидроопоры, на которые наклон платформы 5 больше, движутся быстрее, а те, на которые меньше - медленнее, те же гидроопоры, которые находятся в противоположной наклону стороне, стоят на месте. Каждая гидроопора перемещается со скоростью, обусловленной открытым участком дроссельной щели 19 соответствующего ей дросселя. Происходит вывешивание и плавное перемещение платформы 5 в горизонтальное положение. По мере перемещения платформы 5 в горизонтальное положение золотники 16 открытых дросселей под действием маятника 10 постепенно движутся в сторону закрытого состояния. После выхода платформы 5 в горизонтальное положение все дроссели 6,7,8,9 переходят в закрытое состояние. Перемещения гидроопор 1,2,3,4 прекращаются. Гидрораспределитель 34, а за ним и клапан 24, в связи с тем, что его полость управления посредством гидролиний 33, 46, 60 соединяется со сливной магистралью 62, возвращаются в исходное положение. Нагрузка от веса платформы воспринимается объемом рабочей жидкости, заключенной в полостях рабочего хода гидроопор 1,2,3,4, которые заперты клапанами 20, 21, 22, 23, 47, 48, 49, 50.
При переключении гидрораспределителя 34 в правую позицию полости холостого хода гидроопор 1,2,3,4 и полости управления клапанов 20, 21, 22, 23 посредством соответствующих гидролиний 51-58 сообщаются с напорной магистралью 61. Под действием давления рабочей жидкости клапаны 20, 21, 22, 23 переходят в открытое состояние. После этого полости рабочего хода гидроопор 1,2,3,4 через соответствующие клапаны 20, 21, 22, 23, через клапан 24 посредством соответствующих гидролиний 25-33 сообщаются со сливной магистралью 62. Происходит обратное перемещение гидроопор 1,2,3,4. Платформа 5 возвращается в первоначальное положение. Гидрораспределитель 34 переключается в исходную позицию.
Дроссель 59 служит для гашения колебаний давления рабочей жидкости в полости управления клапана 24.
Использование изобретения позволяет уменьшить габариты и массу гидравлического привода за счет того, что отпадает необходимость в применении громоздких дозаторов. Кроме этого, оно позволяет получить высокую плавность и точность горизонтирования платформы за счет бесступен- чатого регулирования расхода рабочей жидкости во всех гидроопорах одновременно. У механизмов, снабженных таким гидравлическим приводом, уменьшается масса и увеличивается срок их эксплуатации. (56) Авторское свидетельство СССР N 7691120, кл. F 15 В 11/22, 1978.
Сущность изобретения: на платформе установлены гидроопоры с полостями рабочего хода. Гидрозамки, сообщенные через гидрораспределитель с напором и сливом, установлены в магистралях, подключенных к полостям рабочего хода. В обводных гидролиниях установлены дроссели, подключеные с одной стороны к полостям рабочего хода. Гидроуправляемый двухпозиционный нормально открытый клапан с пружинным возвратом установлен в магистрали, сообщающей выход гидрораспределителя с входами гидрозамков. Полость управления клапана сообщена с его выходом. Обратные клапаны установлены в обводной линии между полостями рабочего хода и дросселями, сообщенными с входом гидроуправляемого клапана. Орган управления каждого дросселя, закрепленного на платформе, выполнен с возможностью взаимодействия с маятником, шарширно закрепленного на платформе. 4 ил.
ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ, содержащий установленные на последней гидроопоры с полостями рабочего и холостого хода, сообщенными через гидрораспределитель с напором и сливом, гидрозамки, установленные в магистралях, подключенных к полостям рабочего хода, и обводные гидролинии с установленными в них дросселями, подключенные с одной стороны к полостям рабочего хода гидроопор, отличающийся тем, что, с целью повышения плавности в работе, он снабжен гидроуправляемым двухпозиционным нормально открытым клапаном с пружинным возвратом, установленным в магистрали, сообщающей выход гидрораспределителя с входами гидрозамков, полость управления которого сообщена с его входом, и обратными клапанами, установленными в обводных линиях между полостями рабочего хода и дросселями, сообщенными с входом гидроуправляемого клапана, при этом орган управления каждого дросселя, закрепленного на платформе, выполнен с возможностью взаимодействия с маятником, шарнирно закрепленным на платформе.
