Изобретение относится к области машиностроения, а именно к гидравлическим приводам, и может быть использовано в подъемно-транспортных механизмах для вывешивания и горизонтирования грузовых платформ, расположенных на неподвижной площадке.
Известен гидравлический привод перемещения грузовой платформы, содержащий гидроопоры, установленные на платформе и связанные гидромагистралями с дозатором возвратно-поступательного движения, реверсивным распределителем и источником питания [1] магистрали, связывающие гидроопоры с дозатором, включены золотники горизонтирования, соединенные с баком. Количество секций дозатора равно количеству гидроопор.
Недостатком известного привода является то, что для вывешивания и горизонтирования грузовой платформы требуется дозатор больших габаритов и массы, так как объем каждой секции дозатора определяется суммой объемов, потребных на холостой ход гидроопор (выпуск штоков до контакта с опорной площадкой или втягивания штоков), на рабочий ход гидроопор при подъеме (опускании) платформы и на рабочий ход гидроопор при ее горизонтировании.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является гидравлический привод вывешивания и горизонтирования грузовой платформы, который принят в качестве прототипа [2]. Этот привод содержит гидроопоры, установленные на платформе, дозатор возвратно-поступательного движения, реверсивный распределитель и источник питания, связанные магистралями, управляемые обратные клапаны, штоковые полости которых сообщены с гидроопорами, дополнительный распределитель, соединенный с источником питания и с поршеньковыми и штоковыми полостями упомянутых клапанов. В магистрали связывающие гидроопоры с дозатором включены золотники горизонтирования, соединенные с баком. Количество секций дозатора равно количеству гидроопор. Объем каждой секции дозатора определяется лишь объемом, потребным на рабочий ход гидроопор при ее горизонтировании. Количество гидроопор может быть равно 4 или 3.
Недостатком известного привода является значительная погрешность синхронного хода гидроопор, определяемая утечками в золотниках горизонтирования, что обуславливает нарушение требуемой точности горизонтального положения платформы или ее деформацию. Если, например, утечки в золотниках горизонтирования, связанных с одной парой соседних гидроопор, больше утечек в золотниках горизонтирования, связанных с другой парой, то в процессе подъема (опускания) отгоризонтированной платформы может произойти нарушение требуемой точности ее углового положения, что потребует повторения операции горизонтирования. При этом усложняется обслуживание привода и возрастает общая продолжительность рабочих операций. С другой стороны, может иметь место и такая ситуация, когда утечки в золотниках горизонтирования, связанных с одной парой диагонально расположенных гидроопор, больше утечек в золотниках горинтирования, связанных с другой парой. В этом случае в процессе подъема (опускания) платформы произойдет перераспределение массовой нагрузки на гидроопоры и в металлоконструкции платформы появятся упругие деформации. Применительно к платформам, имеющим большие габариты в плане и малую жесткость, наличие указанных деформаций может привести к нарушению взаимного расположения находящихся на платформе приборов и агрегатов и к невозможности их функционирования.
Недостатком известного привода является и большой занимаемый им объем, величина которого в значительной мере определяется малогабаритными параметрами золотников горизонтирования. Размеры этих золотников зависят от номинального расхода рабочей жидкости, поступающего на гидроопору, причем чем больше указанный расход, тем больше габариты и масса золотников.
Задачей, решаемой заявленным изобретением, является повышение точности синхронного хода гидроопор привода вывешивания и горизонтирования, а также уменьшение его массогабаритных параметров.
Решение указанной задачи обеспечивается тем, что в известном гидравлическом приводе вывешивания и горизонтирования грузовой платформы, содержащем гидроопоры, установленные на платформе, дозатор возвратно-поступательного движения, реверсивный распределитель и источник питания, связанные магистралями, управляемые обратные клапаны, штоковые полости которых сообщены с гидроопорами, дополнительный распределитель, связанный с источником питания и с поршеньковыми и штоковыми полостями указанных клапанов, и золотники горизонтирования, сливные отверстия которых соединены с баком, согласно изобретению входные отверстия золотников горизонтирования соединены с источником питания, а выходные отверстия -с поршеньковыми полостями управляемых обратных клапанов. Использование заявляемого привода позволяет повысить точность синхронного хода гидроопор путем исключения из ветвей привода дозатор-гидроопоры золотников горизонтирования, имеющих утечки, и подключения этих золотников к источнику питания и поршеньковым полостям указанных клапанов. Использование заявляемого привода позволяет также уменьшить занимаемый им объем, поскольку в качестве золотников горизонтирования можно применять распределители с минимально возможной пропускной способностью.
Для варианта гидропривода с четырьмя гидроопорами, расположенными по углам грузовой платформы, золотники горизонтирования могут быть выполнены в виде двух трехпозиционных золотников, причем выходные отверстия одного золотника горизонтирования соединены с поршеньковыми полостями управляемых обратных клапанов, штоковые полости которых сообщены с одной парой диагонально расположенных гидроопор, а выходные отверстия другого золотника горизонтирования соединены с поршеньковыми полостями управляемых обратных клапанов, штоковые полости которых сообщены с другой парой диагонально расположенных гидроопор. При этом в наибольшей степени уменьшается объем, занимаемый золотниками горизонтирования.
Каждый управляемый обратный клапан может быть выполнен с второй поршеньковой полостью, при этом выходные отверстия золотников горизонтирования соединены с первыми поршеньковыми полостями указанных клапанов, а дополнительный распределитель - с их вторыми поршеньковыми полостями. Это позволяет уменьшить массогабаритные параметры гидропривода благодаря исключению из его состава вспомогательных гидроэлементов.
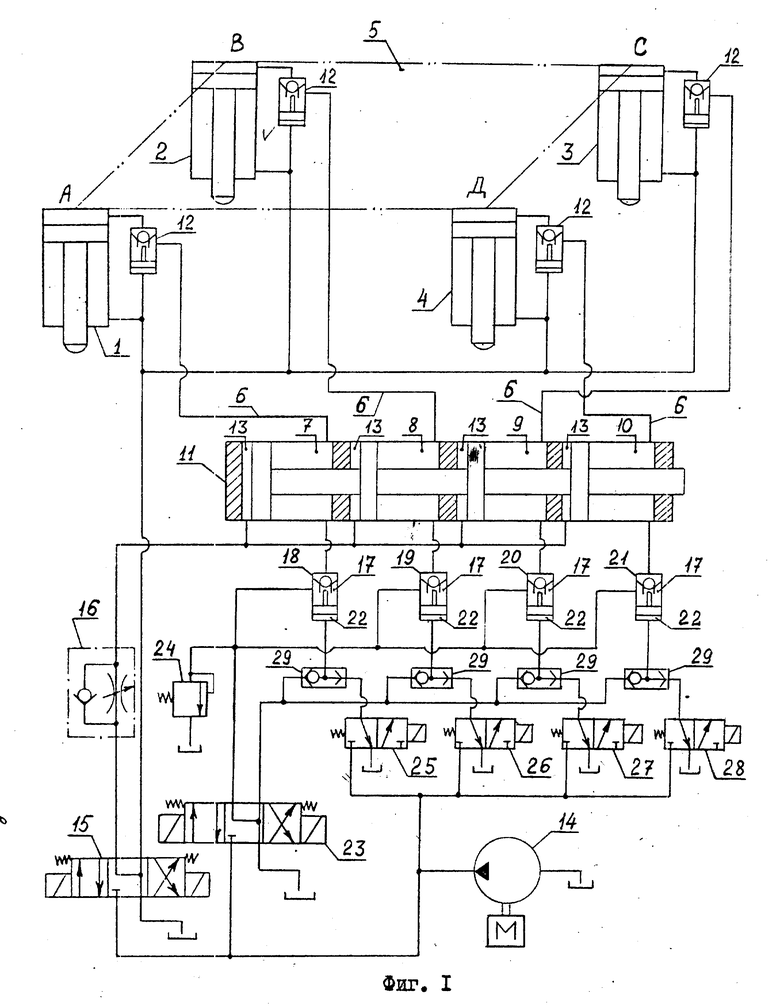
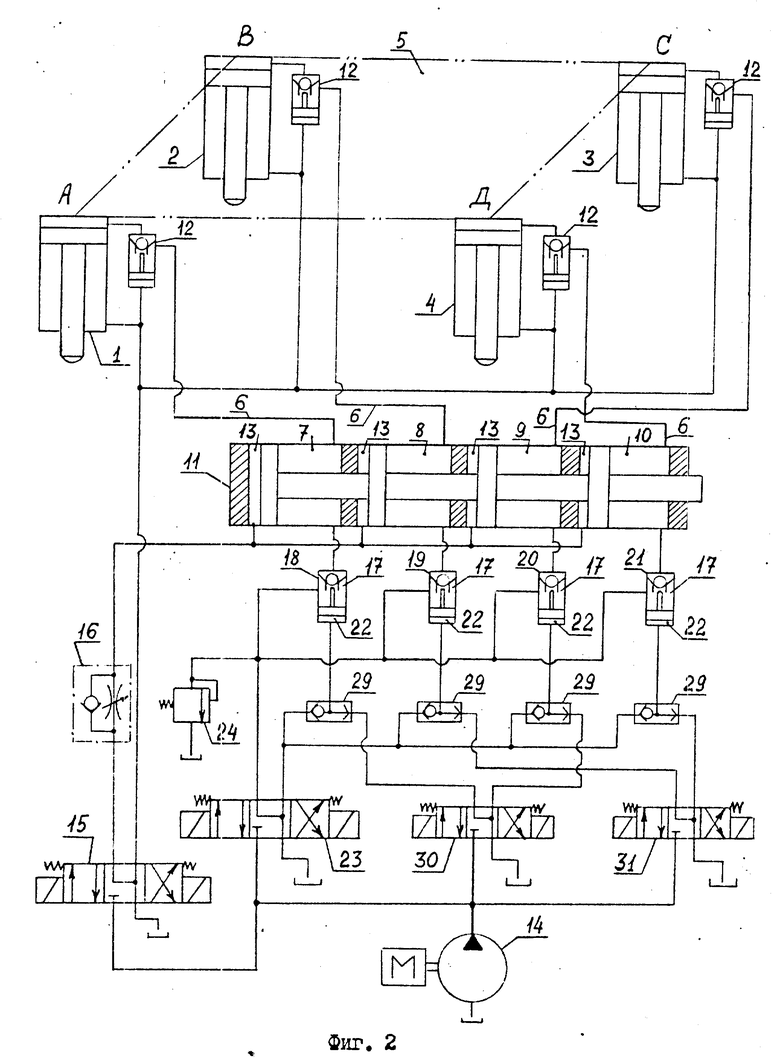
На фиг. 1 представлена принципиальная гидросхема привода вывешивания и горизонтирования грузовой платформы; на фиг.2 - вариант гидросхемы привода с использованием двух трехпозиционных золотников горизонтирования; на фиг.3 - часть гидросхемы привода с управляемыми обратными клапанами, выполненными с вторыми поршеньковыми полостями.
Гидравлический привод вывешивания и горизонтирования грузовой платформы (фиг. 1) содержит гидроопоры 1-4, установленные на платформе 5 и связанные магистралями 6 с полостями 7-10 дозатора возвратно-поступательного движения 11. В магистрали 6 включены односторонние гидрозамки 12, предназначенные для фиксации платформы 5 в поднятом положении. Полости 13 дозатора 11 и штоковые полости гидроопор 1-4 сообщены с насосом 14 и баком через реверсивный распределитель 15, служащий для изменения направления движения указанных гидроопор и дозатора. Количество полостей 7-10 и количество полостей 13 дозатора 11 соответствует количеству гидроопор 1-4. С помощью дросселя с обратным клапаном 16 обеспечивается ограничение скорости опускания платформы 5 и свободное пропускание масла от насоса 14 к дозатору 11 при ее подъеме. К полостям 7-10 дозатора 11, связанным магистралями 6 с гидроопорами 1-4, подсоединены штоковыми полостями 17 управляемые обратные клапаны (УОК) 18-21. Количество УОК 18-21 равно количеству гидроопор 1-4. Штоковые 17 и поршеньковые 22 полости УОК 18-21 через дополнительный распределитель 23 соединены с насосом 14 и баком. К магистрали, соединяющей штоковые полости 17 УОК 18-21 с дополнительным распределителем 23, подключен перепускной клапан 24, давление настройки которого несколько превышает величину давления, потребную для операции холостого выпуска штоков гидроопор до контакта с грунтом перед подъемом платформы 5.
Двухпозиционные золотники горизонтирования 25-28 своими входными отверстиями соединены с насосом 14, выходными отверстиями - с поршеньковыми полостями 22 УОК 18-21, а сливными отверстиями - с баком. Количество золотников горизонтирования 25-28 равно количеству гидроопор 1-4.
С помощью челночных клапанов 29 исключается работа насоса 14 на холостом ходу при переключении распределителя 23 или золотников горизонтирования 25-28 в правую позицию (вместо челночных клапанов 29 могут быть использованы гидроуправляемые трехлинейные золотники). Гидравлический привод содержит фильтры, предохранительные клапаны и устройство для разгрузки насоса (на чертежах не показаны).
На участках дозатор 11 - магистрали 6 - гидроопоры 1-4 гидроэлементы, имеющие золотниковые посадки и, соответственно, утечки, отсутствуют, что обуславливает исключение погрешности синхронного хода гидроопор 1-4, вызываемой указанными утечками.
В варианте исполнения гидравлического привода, представленном на фиг.2, золотники горизонтирования выполнены в виде двух трехпозиционных золотников 30 и 31, причем выходные отверстия золотника 30 соединены с поршеньковыми полостями 22 УОК 18 и УОК 20, штоковые полости 17 которых сообщены с диагонально расположенными гидроопорами 1 и 3, а выходные отверстия золотника 31 соединены с поршеньковыми полостями 22 УОК 19 и УОК 21, штоковые полости 17 которых сообщены с диагонально расположенными гидроопорами 2 и 4. При этом объем, занимаемый золотниками горизонтирования, сокращается до минимума.
На фиг. 3 показана часть гидравлического привода в варианте исполнения, когда каждый УОК 18-21 выполнен с второй поршеньковой полостью 32, при этом золотники горизонтирования 30 и 31 соединены своими выходными отверстиями с первыми поршеньковыми полостями 22 УОК 18-21, а дополнительный распределитель 23 связан с вторыми поршеньковыми полостями 32 указанных клапанов. В этом случае исключается необходимость использования челночных клапанов и, соответственно, уменьшаются массогабаритные параметры привода. Магистрали 33 и 34 соединяют элементы гидропривода с непоказанными на фиг.3 реверсивным распределителем 15 и дозатором 11.
Гидравлический привод вывешивания и горизонтирования грузовой платформы работает следующим образом.
В исходном положении все распределители занимают позиции, как показано на фиг.1. После запуска насоса 14 дополнительный распределитель 23 переключается в левую позицию и масло от насоса 14 через дополнительный распределитель 23, УОК 18-21, полости 7-10 дозатора 11 и магистрали 6 поступает в поршневые полости гидроопор 1-4, перемещая в несинхронном режиме их поршни вниз вхолостую. Из штоковых полостей гидроопор 1-4 масло через реверсивный распределитель 15 сливается в бак. Таким образом, осуществляется операция выпуска штоков гидроопор 1-4 до контакта с грунтом (опорной площадкой). При этом ход поршней дозатора 11 не используется и они остаются в исходном левом положении. После того, как все штоки гидроопор 1-4 коснутся грунта, давление в гидроприводе повышается до величины, на которую настроен перепускной клапан 24. При срабатывании клапана 24 подается сигнал на возвращение дополнительного распределителя 23 в исходную среднюю позицию. На этом операция холостого выпуска штоков гидроопор 1-4 заканчивается.
Для выполнения операции вывешивания (подъема) платформы 5 реверсивный распределитель 15 переключается в левую позицию и масло от насоса 14 через распределитель 15 и обратный клапан 16 поступает в полости 13 дозатора 11, осуществляя движение его поршней вправо. Из полостей 7-10 дозатора 11 масло вытесняется в поршневые полости гидроопор 1-4, перемещая их вверх в синхронном режиме. Из штоковых полостей гидроопор 1-4 масло через распределитель 15 сливается в бак.
Горизонтирование платформы 5 последовательно по ее сторонам производится в процессе подъема (при включенном реверсивном распределителе 15) путем выключения и включения пары соответствующих золотников горизонтирования 25-28. Для горизонтирования платформы 5 относительно, например, стороны АВ золотники 25 и 26 включаются в правую позицию, соединяя насос 14 с поршеньковыми полостями 22 УОК 18 и 19. Указанные клапаны открываются, соединяя полости 7 и 8 дозатора 11 через открытые УОК 18, 19 и дополнительный распределитель 23 с баком. Гидроопоры 1 и 2 останавливаются. Из полостей 9 и 10 дозатора 11 масло продолжает поступать в поршневые полости гидроопор 3 и 4, осуществляя тем самым поворот платформы 5 относительно стороны АВ. По достижении заданной точности горизонтирования золотники 25 и 26 выключаются, а УОК 18 и 19 закрываются. При этом масло из всех правых полостей 7-10 дозатора 11 поступает только в поршневые полости гидроопор 1-4, производя тем самым дальнейший подъем платформы 5.
В варианте использования в гидроприводе трехпозиционных золотников 30 и 31 (фиг.2) операция горизонтирования платформы 5 относительно стороны АВ осуществляется путем включения указанных золотников в левую позицию. По достижении заданной точности горизонтирования золотники 30 и 31 превращаются в исходную среднюю позицию.
Следует отметить, что в заявляемом гидроприводе подъем отгоризонтированной платформы 5 производится при максимальной точности синхронного хода гидроопор 1-4, поскольку на участках дозатор 11 - магистрали 6 - гидроопоры 1-4 гидроэлементы, имеющие золотниковые посадки и, соответственно, гарантированные утечки, отсутствуют. Движение пары соседних гидроопор в процессе горизонтирования платформы 5 также производится при максимальной точности их синхронного хода. После подъема платформы 5 на заданную высоту реверсивный распределитель 15 переключается в исходную среднюю позицию, а насос 14 выключается. Платформа 5 останавливается. Нагрузка от ее веса воспринимается давлением масла, запертого в поршневых полостях гидроопор 1-4 гидрозамками 12.
Для опускания платформы 5 в режиме синхронного движения гидроопор 1-4 после запуска насоса 14 реверсивный распределитель 15 переключается в правую позицию, соединяя насос 14 со штоковыми полостями гидроопор 1-4 и с поршеньковыми полостями гидрозамков 12. Последние открываются, и платформа 5 под действием своего веса и давления в штоковых полостях гидроопор 1-4 перемещается вниз. При этом масло, вытесняемое из поршневых полостей гидроопор 1-4, поступает по магистралям 6 в полости 7-10 дозатора 11, перемещая его поршни влево. Из полостей 13 дозатора 11 масло через дроссель 16 и реверсивный распределитель 15 поступает в бак. Скорость опускания платформы 5 определяется настройкой дросселя 16. После того, как какая-либо сторона платформы 5 (например, сторона АВ) закончит движение вниз, платформа начнет поворачиваться относительно неподвижной стороны АВ, стремясь занять положение, исходное перед подъемом. В этот период времени масло поступает в полости 7-10 дозатора 11 как вследствие опускания стороны СД (перемещения вниз корпусов гидроопор 3,4), так и вследствие начала втягивания штоков гидроопор 1, 2.
После подхода поршней дозатора 11 в крайнее левое положение (при этом платформа 5 занимает положение, исходное перед подъемом) подается сигнал на выполнение операции втягивания штоков гидроопор 1-4 вхолостую в исходное верхнее положение. Дополнительный распределитель 23 переключается в правую позицию, соединяя насос 14 через челночные клапаны 29 с поршневыми полостями 22 УОК 18-21. Последние открываются, и штоки гидроопор 1-4 под действием давления масла в их штоковых полостях несинхронно перемещаются вверх. Из поршневых полостей гидроопор 1-4 масло через открытые гидрозамки 12, магистрали 6, полости 7-10 дозатора 11, открытые УОК 18-21 и дополнительный распределитель 23 сливается в бак.
В варианте выполнения УОК 18-21 с вторыми поршеньковыми полостями 32 (фиг. 3) открытие этих клапанов при выполнении операции втягивания штоков гидроопор 1-4 вхолостую осуществляется путем подачи масла от насоса 14 через включенный в правую позицию дополнительный распределитель 23 в полости 32. Выполнение в УОК 18-21 вторых поршеньковых полостей 32 позволяет уменьшить массогабаритные параметры привода за счет исключения из его состава челночных клапанов.
После полного втягивания всех штоков гидроопор 1-4 реверсивный распределитель 15 и дополнительный распределитель 23 возвращаются в исходную среднюю позицию, УОК 18-21 закрываются, а насос 14 выключается.
Для подтверждения эффективности заявляемого гидравлического привода вывешивания и горизонтирования грузовой платформы по сравнению с известным гидроприводом по авт. св. N 657184 рассмотрим численный пример.
Пусть известный гидропривод имеет следующие параметры:
Диаметр поршня гидроопоры - D=350 мм
Площадь поршня гидроопоры - S=9,62•104 мм2
Продолжительность подъема отгоризонтованной платформы - Т=30 с
Расстояние между соседними гидроопорами - L=1000 мм
Допускаемые угловые отклонения платформы при горизонтировании - αдоп. = ±4 угл. мин.
В известном гидроприводе в качестве золотников горизонтирования, включенных в напорные магистрали, соединяющие дозатор с гидроопорами, могут быть использованы распределители, например, типа Р203 (изготовитель - ульяновское ПО "Гидроаппарат"), масса которых 16,6 кг, длина 260 мм, условный проход dу 20 мм, номинальное давление 32 МПа. Величина максимальных внутренних утечек в таких распределителях равна
Q
При изготовлении известного гидропривода может иметь место ситуация, когда в напорные магистрали одной пары соседних гидроопор включены распределители Р203 с максимальной внутренней утечкой Q
ΔQут. = Q
Указанная разность утечек обуславливает погрешность синхронизации ΔHут. (разность ходов одной пары гидроопор относительно другой пары) при подъеме платформы, равную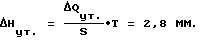
По окончании подъема отгоризонтированной платформы изменение ее углового положения составляет величину
Следовательно, при использовании известного гидропривода по окончании подъема необходимо будет повторить операцию горизонтирования, что увеличивает общую продолжительность рабочих операций и усложняет обслуживание гидропривода.
Заявляемый гидропривод лишен отмеченных выше недостатков, поскольку в напорных магистралях его гидроопор золотники горизонтирования отсутствуют, вследствие чего ΔQут.= 0. В заявляемом изобретении погрешность синхронного хода гидроопор весьма незначительна и при качественном изготовлении уплотнительных соединений поршневых пар дозатора и гидроопор, а также уплотнительных соединений управляемых обратных клапанов определяется лишь технологическими допусками на изготовление дозатора и гидроопор.
Сопоставим заявляемый и известный гидроприводы по массогабаритным параметрам. Суммарная масса 4-х распределителей Р203 равна 16,6•4=66,4 кг.
В качестве золотников горизонтирования заявляемого привода можно использовать два трехпозиционных распределителя ПЕ6 (изготовитель - ульяновское ПО "Гидроаппарат"). Масса указанного распределителя 1,6 кг, длина 206 мм, условный проход dу = 6 мм, номинальное давление 32 МПа. Суммарная масса двух распределителей ПЕ6 составляет
1,6•2=3,2 кг.
Из представленных численных данных следует, что масса заявляемого гидропривода меньше массы известного гидропривода на 63,2 кг. Объем, занимаемый аппаратурой заявляемого привода, существенно меньше объема, занимаемого аппаратурой известного привода.
Таким образом, заявляемое изобретение обеспечивает повышение точности синхронного хода исполнительных органов, сокращение продолжительности рабочих операций, уменьшение массогабаритных параметров гидропривода, а также облегчение его монтажа и эксплуатации.
Использование: в подъемных механизмах для вывешивания и горизонтирования грузовых платформ и самоходных агрегатов, применяемых в промышленности, строительстве и на транспорте. Сущность изобретения: гидравлический привод содержит гидроопоры, установленные на грузовой платформе и связанные гидромагистралями с полостями дозатора возвратно-поступательного движения. Полости дозатора и штоковые полости гидроопор через реверсивный распределитель сообщены с источником питания и баком. К полостям дозатора, связанным с гидроопорами, подключены штоковые полости управления обратных клапанов. При этом штоковые и поршеньковые полости обратных клапанов через дополнительный распределитель соединены с источником питания и баком. Привод снабжен золотниками горизонтирования, сливные отверстия которых соединены с баком, входные отверстия соединены с источником питания, а выходные отверстия - с поршеньковыми полостями обратных клапанов. 2 з.п. ф-лы, 3 ил.