Изобретение относится к области машиностроения, а именно к гидравлическим приводам, и может быть использовано в подъемно-транспортных механизмах для вывешивания (подъема) и горизонтирования грузовых платформ и самоходных агрегатов, расположенных на неподвижной площадке.
Известен гидравлический привод вывешивания и горизонтирования грузовой платформы, содержащий две носовые и две кормовые гидроопоры, установленные на грузовой платформе, делитель потока и два насоса, соединенные магистралями соответственно с поршневыми и штоковыми полостями носовых гидроопор и с поршневыми и штоковыми полостями кормовых гидроопор, причем один из насосов соединен с поршневыми полостями гидроопор через делитель потока (авт. свид. №1245770, МПК F15B 11/22, опубл. 23.07.86). Поршневые полости гидроопор сообщены с надклапанными полостями гидрозамков, управляющие камеры которых соединены с насосами. Привод снабжен трехпозиционными распределителями горизонтирования, которые выполнены трех- и четырехлинейными, и двухсекционным дозатором возвратно-поступательного движения, приводные полости которого соединены с насосами. Насосная полость одной секции дозатора через трехпозиционные распределители горизонтирования сообщена с поршневыми полостями двух носовых и одной кормовой гидроопор, а насосная полость другой секции - с поршневыми полостями двух кормовых и одной носовой гидроопор. Общее количество распределителей привода равно 14 (с учетом использования в приводе двух золотников разгрузки насосов).
Недостатком известного привода является недостаточная надежность работы, обусловленная наличием в его составе большого количества распределителей, каждый из которых в процессе эксплуатации из-за загрязнений рабочей жидкости может быть защемлен в исходной или рабочей позиции. При использовании распределителей с электромагнитным управлением несрабатывание того или иного распределителя может также иметь место по причине обрыва подводящей электроцепи или по причине неисправности электромагнита. С увеличением количества распределителей вероятность безотказной работы привода соответственно снижается.
Недостатком известного привода являются также большие затраты мощности на работу всех насосов при опускании платформы.
Наиболее близким по совокупности существенных признаков к заявляемому изобретению является гидравлический привод вывешивания и горизонтирования грузовой платформы по патенту RU №2240448, МПК F15B 11/22, опубл. 20.11.2004. Этот привод содержит гидроопоры, установленные на грузовой платформе, дозатор возвратно-поступательного движения, реверсивный распределитель, одно выходное отверстие которого сообщено магистралями через дозатор возвратно-поступательного движения с поршневыми полостями гидроопор, а другое сообщено со штоковыми полостями гидроопор, перепускной клапан, источник питания (насос), бак и управляемые обратные клапаны, надклапанные полости которых сообщены с поршневыми полостями гидроопор. Привод снабжен двухпозиционными трехлинейными золотниками, выходные отверстия которых сообщены с поршеньковыми полостями управляемых обратных клапанов. Количество таких золотников равно количеству гидроопор. Привод содержит также дополнительный золотник (дополнительный распределитель), первое выходное отверстие которого сообщено с подклапанными полостями управляемых обратных клапанов и через первый обратный клапан сообщено с перепускным клапаном, а второе выходное отверстие сообщено с поршеньковыми полостями управляемых обратных клапанов. Штоковые полости гидроопор сообщены с перепускным клапаном через второй обратный клапан. Насос и бак сообщены магистралями соответственно с входными и сливными отверстиями всех упомянутых распределителей. Общее количество распределителей привода равно 7 (с учетом использования в приводе золотника разгрузки насоса).
Недостатком известного привода является недостаточная надежность работы, обусловленная наличием в его составе большого количества распределителей. С увеличением количества распределителей вероятность безотказной работы привода соответственно снижается.
Недостатком известного привода являются также большие затраты мощности при выполнении операции опускания платформы, величина которых определяется давлением настройки перепускного клапана и всей производительностью (подачей) источника питания.
К числу недостатков известного привода следует отнести и большой период его работы при выполнении операций вывешивания (подъема) и горизонтирования платформы, что объясняется следующим. Для уменьшения массогабаритных параметров дозатора и, соответственно, привода в целом дозатор при выполнении указанных операций используют как многоходовый элемент. В этом случае после каждого рабочего хода поршней дозатора под нагрузкой (кроме последнего хода) производится реверс его поршней вхолостую в исходное положение путем переключения дополнительного распределителя в соответствующую позицию. Наличие реверсивных ходов поршней дозатора обусловливает прерывистый характер движения гидроопор и платформы при ее подъеме и горизонтировании, так как при осуществлении этих ходов подача рабочей жидкости в гидроопоры прекращается. Следовательно, период работы известного привода при выполнении операций подъема и горизонтирования платформы определяется суммарной продолжительностью как рабочих ходов поршней дозатора, так и реверсивных ходов его поршней, что и обусловливает существенное увеличение упомянутого периода его работы.
Задачей, решаемой заявляемым изобретением, является разработка гидравлического привода вывешивания и горизонтирования грузовой платформы, обеспечивающего повышение его надежности при выполнении рабочих операций, снижение затрат мощности при выполнении операции опускания грузовой платформы, а также сокращение периода его работы при выполнении операций ее подъема и горизонтирования.
Решение указанной задачи обеспечивается тем, что в известном гидравлическом приводе вывешивания и горизонтирования грузовой платформы, содержащем гидроопоры, установленные на грузовой платформе, золотники, количество которых равно количеству гидроопор, перепускной клапан, дополнительный золотник, первое выходное отверстие которого через первый обратный клапан сообщено с перепускным клапаном, источник питания и бак, сообщенные магистралями соответственно с входными и сливными отверстиями упомянутых золотников, причем штоковые полости гидроопор сообщены с перепускным клапаном через второй обратный клапан, согласно изобретению золотники выполнены в виде трехпозиционных четырехлинейных распределителей, а источник питания выполнен в виде насосов, количество которых равно количеству гидроопор. Одно выходное отверстие каждого трехпозиционного четырехлинейного распределителя закрыто заглушкой, другое выходное отверстие сообщено с поршневой полостью одной из гидроопор, а его входное отверстие сообщено с одним из насосов и при нахождении распределителя в исходной позиции сообщено с его сливным отверстием. Второе выходное отверстие дополнительного золотника сообщено со штоковыми полостями гидроопор. В магистрали, сообщающие насосы с входным отверстием дополнительного золотника, установлены дополнительные обратные клапаны.
Технический результат изобретения состоит в повышении надежности гидравлического привода вывешивания и горизонтирования грузовой платформы при выполнении рабочих операций путем сокращения количества распределителей, в снижении затрат мощности при выполнении операции ее опускания путем перевода части насосов в режим холостого хода, а также в сокращении периода работы привода при выполнении операций подъема и горизонтирования платформы благодаря обеспечению непрерывного движения гидроопор.
Сущность изобретения иллюстрируется чертежом, на котором представлена гидросхема привода вывешивания и горизонтирования грузовой платформы.
Привод содержит гидроопоры 1-4, установленные на платформе 5, насосы 6-9 и золотники в виде трехпозиционных четырехлинейных распределителей 10-13. Количество этих распределителей и количество насосов 6-9 равно количеству гидроопор 1-4 (в качестве насосов 6-9 для уменьшения массогабаритных параметров привода можно использовать, например, четырехсекционный насос шестеренного типа, имеющий общий вал). Насосы 6-9 обеспечивают перемещение гидроопор 1-4 в синхронном режиме при подъеме платформы 5, а также перемещение соответствующих пар соседних гидроопор вверх в синхронном режиме при ее горизонтировании. Трехпозиционные четырехлинейные распределители 10-13 предназначены для выполнения как операции горизонтирования платформы 5, так и операций выпуска штоков гидроопор 1-4, подъема платформы 5, а также для запуска насосов 6-9 вхолостую.
Насосы 6-9 своими напорными магистралями 14-17 сообщены соответственно с входными отверстиями трехпозиционных четырехлинейных распределителей 10-13, сливные отверстия которых магистралью 18 сообщены с баком 19. Одни выходные отверстия (левые по чертежу) этих распределителей закрыты заглушками, а другие выходные отверстия магистралями 20-23 сообщены соответственно с поршневыми полостями 24 гидроопор 1-4. Входные отверстия трехпозиционных четырехлинейных распределителей 10-13 при их нахождении в исходной позиции (по чертежу) соединены с их сливными отверстиями.
Напорные магистрали 14-17 насосов 6-9 через магистрали 25-28 сообщены с входным отверстием дополнительного золотника 29, сливное отверстие которого магистралью 30 сообщено с баком 19. Первое выходное отверстие (левое по чертежу) дополнительного золотника 29 через первый обратный клапан 31 сообщено с перепускным клапаном 32, а его второе выходное отверстие сообщено со штоковыми полостями 33 гидроопор 1-4. Указанные полости через второй обратный клапан 34 сообщены с перепускным клапаном 32. С помощью обратных клапанов 34 и 31 при выполнении рабочих операций исключается работа насосов 6-9 на холостом ходу при переключении дополнительного золотника 29 соответственно в левую и правую позиции (здесь и далее под левой и правой позициями понимается позиция по чертежу). В магистрали 25-28 установлены дополнительные обратные клапаны 35-38, необходимые для исключения подачи рабочей жидкости из напорной магистрали насоса, работающего при более высоком давлении, в напорную магистраль насоса, работающего при менее высоком давлении, при выполнении операций подъема и горизонтирования платформы 5.
В магистрали 20-23 включены односторонние гидрозамки 39, предназначенные для фиксации платформы 5 в поднятом положении, и обратные клапаны 40 с дросселями 41. Обратные клапаны 40 служат для свободного (без дросселирования) пропускания рабочей жидкости к поршневым полостям 24 гидроопор 1-4 при их подъеме, а дроссели 41 предназначены для ограничения скорости опускания этих гидроопор. Путем соответствующей настройки дросселей 41 обеспечивается опускание всех гидроопор 1-4 в синхронном режиме.
Штоковые полости 33 гидроопор 1-4 сообщены с управляющими камерами гидрозамков 39. Конструктивные параметры гидрозамков 39 (диаметр управляющего поршенька, диаметр штока и диаметр седла корпуса) назначаются из условий открытия и гарантированного удержания этих гидрозамков в открытом положении под действием давления в их управляющих камерах, равного давлению настройки перепускного клапана 32, при выполнении операции опускания платформы 5. К входному отверстию дополнительного золотника 29 подключен предохранительный клапан 42, давление настройки которого несколько превышает рабочие давления, развиваемые насосами 6-9 при подъеме платформы 5. Давление настройки перепускного клапана 32 больше величины давления, потребной для операции холостого выпуска штоков гидроопор 1-4 с опорной площадкой (грунтом) перед подъемом платформы 5, но меньше рабочего давления в менее нагруженных гидроопорах (гидроопорах 1, 2 или 3, 4).
Гидравлический привод вывешивания и горизонтирования грузовой платформы работает следующим образом.
В исходном положении все распределители 10-13 и дополнительный золотник 29 занимают позиции, как показано на чертеже. При запуске насосов 6-9 вхолостую рабочая жидкость (масло) от этих насосов через напорные магистрали 14-17, входные и сливные отверстия распределителей 10-13 и магистраль 18 сливается в бак 19. Операция выпуска штоков гидроопор 1-4 до контакта с грунтом производится следующим образом. Распределители 10-13 переключают в правую позицию, соединяя насосы 6-9 с поршневыми полостями 24 гидроопор 1-4. Одновременно дополнительный золотник 29 переключают в левую позицию, соединяя насосы 6-9 через магистрали 25-28, обратные клапаны 35-38 и обратный клапан 31 с перепускным клапаном 32. Масло от насосов 6-9 через напорные магистрали 14-17, распределители 10-13, обратные клапаны 40, магистрали 20-23 и гидрозамки 39 поступает в поршневые полости 24 гидроопор 1-4, перемещая в синхронном режиме их поршни вниз вхолостую. Из штоковых полостей 33 гидроопор 1-4 масло через дополнительный золотник 29 и магистраль 30 сливается в бак 19. При наличии неровностей грунтовой площадки контакт с ней штоков гидроопор 1-4 будет происходить неодновременно. Если, например, шток гидроопоры 1 первым коснется грунта и остановится, давление, развиваемое насосом 6, повышается до величины, на которую настроен перепускной клапан 32, и масло от насоса 6 начинает поступать через перепускной клапан 32 в бак 19. В этот период времени штоки гидроопор 1-4 продолжают синхронно перемещаться вниз.
После того, как штоки всех гидроопор 1-4 коснутся грунта и давление в их поршневых полостях 24 повысится до величины, на которую настроен перепускной клапан 32 (обеспечивая, тем самым, гарантированный контакт с грунтом штоков всех гидроопор 1-4), подается сигнал на выполнение операции вывешивания платформы 5 с подвесок колесного хода (на чертеже не показаны) и ее подъема. При этом дополнительный золотник 29 переключают в исходную среднюю позицию и масло от насосов 6-9 через напорные магистрали 14-17, включенные в правую позицию распределители 10-13, обратные клапаны 40, магистрали 20-23 и гидрозамки 39 поступает в поршневые полости 24 гидроопор 1-4, перемещая их вверх непрерывно в синхронном режиме и осуществляя, тем самым, подъем платформы 5. Из штоковых полостей 33 гидроопор 1-4 масло через дополнительный золотник 29 и магистраль 30 сливается в бак 19.
После подъема платформы 5 на требуемую высоту распределители 10-13 возвращают в исходную среднюю позицию, переводя насосы 6-9 в режим холостого хода, и платформа 5 останавливается. Нагрузка от ее веса воспринимается давлением масла, запертого в поршневых полостях 24 гидроопор 1-4 гидрозамками 39.
Горизонтирование платформы 5 последовательно по ее сторонам производится путем включения и выключения пар соответствующих распределителей 10-13. Если, например, платформа 5 наклонена в сторону гидроопоры 2 и гидроопора 4 является наиболее высоко расположенной, то для горизонтирования платформы 5 относительно, например, стороны СД распределители 10 и 11 переключают в правую позицию, соединяя насосы 6 и 7 через напорные магистрали 14, 15, включенные в правую позицию распределители 10, 11 и магистрали 20, 21 с поршневыми полостями 24 гидроопор 1 и 2. Указанные гидроопоры синхронно перемещаются вверх, осуществляя, тем самым, непрерывный поворот платформы 5 относительно стороны СД. Из штоковых полостей 33 гидроопор 1 и 2 масло через дополнительный золотник 29 и магистраль 30 сливается в бак 19. В этот период времени масло от насосов 8 и 9, работающих в режиме холостого хода, через напорные магистрали 16, 17, входные и сливные отверстия распределителей 12, 13 и магистраль 18 сливается в бак 19. После того, как стороны ВС и АД платформы 5 займут горизонтальное положение с требуемой точностью, производится ее горизонтирование относительно стороны АД. Распределитель 10 возвращают в исходную среднюю позицию, а распределитель 12 переключают в правую позицию, соединяя насос 8 через напорную магистраль 16, включенный в правую позицию распределитель 12 и магистраль 22 с поршневой полостью 24 гидроопоры 3. Гидроопора 1 останавливается, а гидроопоры 2 и 3 синхронно перемещаются вверх, осуществляя непрерывный поворот платформы 5 относительно стороны АД. Из штоковых полостей 33 гидроопор 2 и 3 масло через дополнительный золотник 29 и магистраль 30 сливается в бак 19. В этот период времени масло от насосов 6 и 9, работающих в режиме холостого хода, через напорные магистрали 14, 17, входные и сливные отверстия распределителей 10, 13 и магистраль 18 сливается в бак 19. После того, как платформа 5 займет горизонтальное положение с требуемой точностью, распределители 11 и 12 переключают в исходную среднюю позицию, переводя насосы 7 и 8 в режим холостого хода. Платформа 5 останавливается. Нагрузка от ее веса воспринимается давлением масла, запертого в поршневых полостях 24 гидроопор 1-4 гидрозамками 39. Насосы 6-9 выключают.
Для опускания платформы 5 в режиме синхронного движения гидроопор 1-4 на подвески колесного хода с помощью заявляемого привода при соответствующих соотношении скоростей подъема и опускания платформы 5 и соотношении площади поршня и эффективной площади штоковой полости гидроопор 1-4 достаточно использовать только часть насосов 6-9 (например, два насоса из четырех). В этом случае после запуска всех насосов 6-9 вхолостую два распределителя (например, распределители 10 и 11) переключают в левую позицию, а дополнительный золотник 29 переключают в правую позицию, сообщая насосы 6 и 7 через магистрали 25, 26, обратные клапаны 35, 36 и включенный в правую позицию дополнительный золотник 29 со штоковыми полостями 33 гидроопор 1-4, с управляющими камерами гидрозамков 39 и через обратный клапан 34 с перепускным клапаном 32. Гидрозамки 39 открываются и платформа 5 под действием своего веса и давления масла в штоковых полостях 33 гидроопор 1-4, определяемого давлением настройки перепускного клапана 32, перемещается вниз. При этом масло от насосов 6 и 7 поступает как в штоковые полости 33 гидроопор 1-4, так и через перепускной клапан 32 в бак 19. Масло, вытесняемое из поршневых полостей 24 гидроопор 1-4, через открытые гидрозамки 39, магистрали 20-23, дроссели 41, распределители 10-13 и магистраль 18 поступает в бак 19. Скорость опускания платформы 5 определяется настройкой дросселей 41. Затраты мощности при этом весьма невелики, так как их величина определяется давлением настройки перепускного клапана 32 (которое меньше давления настройки предохранительного клапана 42) и только половиной производительности источника питания (половиной суммарной производительности насосов 6-9). В процессе опускания платформы 5 масло от насосов 8 и 9 через магистрали 16, 17, входные и сливные отверстия находящихся в исходной позиции распределителей 12, 13 и магистраль 8 сливается в бак 19. Поскольку в рассматриваемом примере работы гидравлического привода гидроопора 4 в процессе подъема и горизонтирования перемещалась вверх на наименьшее расстояние по сравнению с другими гидроопорами 1, 2 и 3, угол платформы 5, на котором расположена гидроопора 4, первым опускается на подвески и платформа 5 начинает поворачиваться относительно гидроопоры 4, стремясь занять положение, исходное перед подъемом. В этот период времени масло из поршневых полостей 24 гидроопор 1-4 вытесняется в бак 19 как вследствие указанного поворота платформы 5, так и вследствие начала втягивания вверх штока гидроопоры 4. После опускания всей платформы 5 на подвески осуществляется втягивание штоков всех гидроопор 1-4 вхолостую под действием давления, развиваемого насосами 6 и 7. При этом штоки всех гидроопор 1-4 перемещаются вверх, вытесняя масло из их поршневых полостей 24 через открытые гидрозамки 39, магистрали 20-23, дроссели 41, распределители 10-13 и магистраль 18 в бак 19.
После полного втягивания штоков всех гидроопор 1-4 в исходное верхнее положение распределители 10, 11 и дополнительный золотник 29 переключают в исходную среднюю позицию, а насосы 6-9 выключают. Гидрозамки 39 закрываются.
Таким образом, заявляемое изобретение позволяет повысить надежность гидравлического привода вывешивания и горизонтирования грузовой платформы при выполнении рабочих операций путем сокращения количества распределителей (с 7 до 5), снизить затраты мощности при выполнении операции опускания грузовой платформы путем перевода части насосов в режим холостого хода, а также сократить период работы привода при выполнении операций ее подъема и горизонтирования благодаря обеспечению непрерывного движения гидроопор.
Для подтверждения эффективности заявляемого гидропривода по сравнению с известным гидроприводом по патенту RU №2240448 рассмотрим численный пример.
Исходные данные:
1. Скорость подъема платформы и скорость ее опускания при использовании как известного гидропривода, так и заявляемого гидропривода одинаковы.
Указанную скорость обозначим v.
2. Площадь поршня гидроопор известного гидропривода равна площади поршня гидроопор заявляемого гидропривода. Указанную площадь обозначим S.
3. Эффективная площадь Sшт штоковой полости гидроопор известного и заявляемого гидроприводов одинакова и равна
Sшт=0,4·S.
4. Давление настройки рпк перепускного клапана известного гидропривода и заявляемого гидропривода одинаково.
5. Количество гидроопор известного и заявляемого гидроприводов равно 4. Количество насосов заявляемого гидропривода равно 4.
6. Гидромеханические и объемные потери в известном и заявляемом гидроприводах не учитываем.
В соответствии с указанными исходными данными при опускании платформы с помощью как известного гидропривода, так и заявляемого гидропривода в штоковые полости гидроопор необходимо подавать расход масла Qшт, равный
Qшт=4·v·Sшт=4·v·0,4·S=1,6·v·S.
Производительность каждого насоса заявляемого гидропривода (определяемая из условия подъема платформы с требуемой скоростью v) равна
Qн=v·S.
Если при опускании платформы с помощью заявляемого гидропривода к штоковым полостям гидроопор подключены только два насоса (другие насосы сообщены с баком), то суммарная производительность Q∑ этих двух насосов равна
Q∑=2·Qн=2·v·S.
Поскольку Q∑ больше Qшт, то разница этих расходов масла, равная
Q∑-Qшт=2·v·S-1,6·v·S=0,4·v·S,
в процессе опускания платформы через перепускной клапан перепускается в бак, вследствие чего в штоковых полостях гидроопор и в связанных с ними управляющих камерах гидрозамков поддерживается давление рпк, достаточное для удержания этих гидрозамков в открытом положении при выполнении данной операции.
Следовательно, мощность N1, потребляемая заявляемым гидроприводом при опускании платформы, равна
N1=рпк·Q∑=2·pпк·v·S.
С другой стороны, производительность Q насоса известного гидропривода (определяемая из условия подъема платформы с требуемой скоростью v) равна
Q=4·v·S.
Поскольку при опускании платформы с помощью известного гидропривода его насос сообщен со штоковыми полостями гидроопор и с перепускным клапаном, мощность N2, потребляемая известным гидроприводом при выполнении данной операции, равна
N2=рпк·Q=4·pпк·v·S.
Как следует из сопоставления полученных значений N1 и N2, при выполнении операции опускания платформы затраты мощности заявляемого гидропривода по сравнению с затратами мощности известного гидропривода снижаются в 2 раза.
Таким образом, благодаря особенности исполнения гидравлического привода вывешивания и горизонтирования грузовой платформы заявляемое изобретение обеспечивает повышение надежности привода при выполнении рабочих операций, снижение затрат мощности при выполнении операции опускания грузовой платформы, а также сокращение периода работы привода при выполнении операций ее подъема и горизонтирования.
Гидравлический привод предназначен для вывешивания и горизонтирования грузовых платформ и самоходных агрегатов. Привод содержит гидроопоры, установленные на грузовой платформе, золотники, выполненные в виде трехпозиционных четырехлинейных распределителей, насосы и бак. Количество этих распределителей и количество насосов равно количеству гидроопор. Одно выходное отверстие каждого трехпозиционного четырехлинейного распределителя закрыто заглушкой, другое выходное отверстие сообщено с поршневой полостью одной из гидроопор, а его входное отверстие сообщено с одним из насосов и при нахождении распределителя в исходной позиции сообщено с его сливным отверстием. Первое выходное отверстие дополнительного золотника через первый обратный клапан сообщено с перепускным клапаном, а второе выходное отверстие сообщено со штоковыми полостями гидроопор. Штоковые полости гидроопор сообщены с перепускным клапаном через второй обратный клапан. Насосы и бак сообщены магистралями соответственно с входным отверстием дополнительного золотника и со сливными отверстиями всех упомянутых распределителей. В магистрали, сообщающие насосы с входным отверстием дополнительного золотника, установлены дополнительные обратные клапаны. Технический результат - повышение надежности привода при выполнении рабочих операций, снижение затрат мощности при выполнении операции опускания платформы и сокращение периода работы привода при выполнении операций ее подъема и горизонтирования. 1 ил.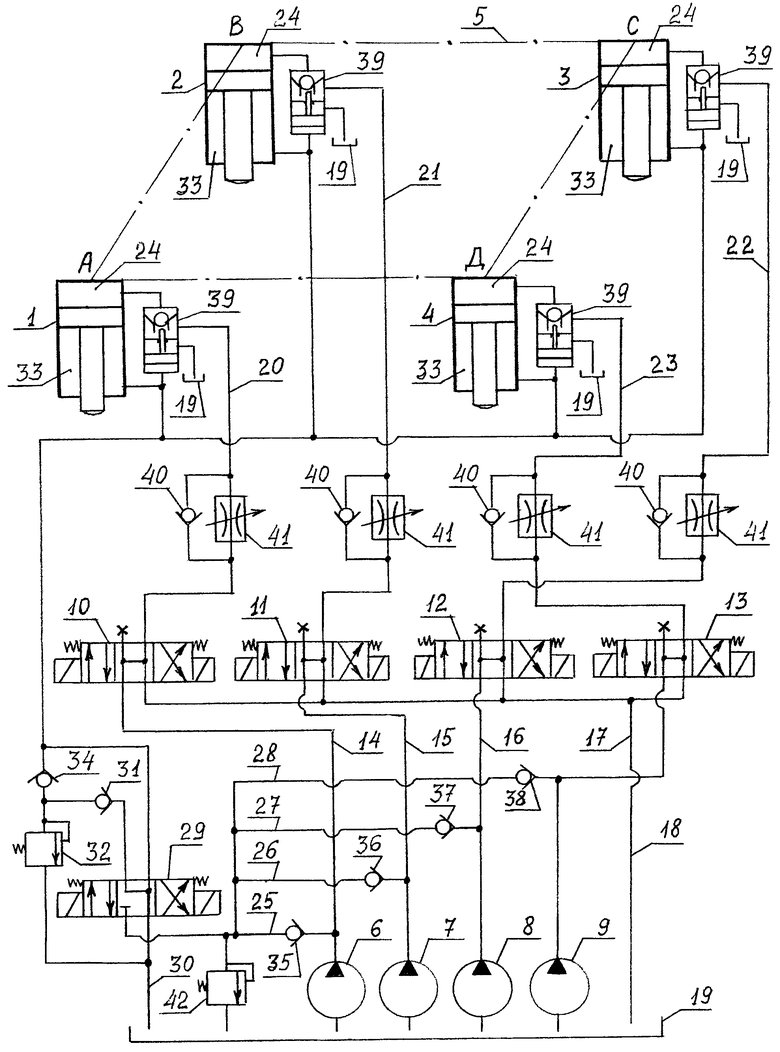
Гидравлический привод вывешивания и горизонтирования грузовой платформы, содержащий гидроопоры, установленные на грузовой платформе, золотники, количество которых равно количеству гидроопор, перепускной клапан, дополнительный золотник, первое выходное отверстие которого через первый обратный клапан сообщено с перепускным клапаном, источник питания и бак, сообщенные магистралями соответственно с входными и сливными отверстиями упомянутых золотников, причем штоковые полости гидроопор сообщены с перепускным клапаном через второй обратный клапан, отличающийся тем, что золотники выполнены в виде трехпозиционных четырехлинейных распределителей, источник питания выполнен в виде насосов, количество которых равно количеству гидроопор, одно выходное отверстие каждого трехпозиционного четырехлинейного распределителя закрыто заглушкой, другое выходное отверстие сообщено с поршневой полостью одной из гидроопор, а его входное отверстие сообщено с одним из насосов и при нахождении распределителя в исходной позиции сообщено с его сливным отверстием, причем второе выходное отверстие дополнительного золотника сообщено со штоковыми полостями гидроопор, при этом в магистрали, сообщающей насосы с входным отверстием дополнительного золотника, установлены дополнительные обратные клапаны.
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2003 |
|
RU2240448C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2005 |
|
RU2303174C1 |
| DE 1920184 В2, 27.11.1969 | |||
| US 3625115 А, 07.12.1971. | |||

