Изобретение относится к электротехнике и может быть использовано для автоматизации настроек регуляторов возбуждения мощных синхронных генераторов.
Известен способ (1), основанный на измерении средних квадратов амплитуды колебаний параметра стабилизации в области низких и высоких частот электромеханической природы и формировании коэффициентов усиления по отклонению и производной частоты напряжения генератора, как интегралов от разности средних квадратов в области низких и высоких частот.
Известный способ позволяет достаточно быстро настраивать коэффициенты регулятора в установившемся режиме, однако не позволяет обеспечить изменение соотношения коэффициентов при изменении режимов генератора и оптимальное демпфирование больших качаний.
Наиболее близким к сущности предлагаемого изобретения является способ (2), основанный на измерении величины первой производной частоты напряжения генератора, установлении коэффициентов усиления по отклонению и первой производной напряжения и частоты при малых качаниях, ограничения величины первой производной напряжения и увеличения до предельно-реализуемого коэффициента регулирования по первой производной частоты при достижении первой производной частоты заданной величины. Недостаток этого способа в неоптимальности выбора величины коэффициента регулирования по первой производной частоты как при больших, так и при малых качаниях, обусловленной отсутствием критерия оптимальности соотношения коэффициентов регулирования по отклонению и первой производной частоты.
Целью изобретения является повышение качества регулирования путем обеспечения оптимального демпфирования как малых, так и больших качаний генератора. Цель изобретения достигается измерением величины пульсаций напряжения и тока ротора генератора на частоте коммутационных циклов вентильного преобразователя, питающего ротор, определения их соотношения, пропорционального инерционности обмотки ротора, и изменения коэффициента усиления по первой производной частоты напряжения генератора прямо пропорционально изменению инерционности обмотки ротора.
Математически способ может быть описан следующим образом:
ΔUf= -K0uΔUг-K1uU
ΔUг, Uг1 - отклонение и первая производная частота напряжения генератора.
Δf, f1 - отклонение и первая производная напряжения генератора.
Кou, К1u - коэффициенты усиления по соответствующим каналам Кof, σ
σ =  , (2)
, (2)
ΔUf, Δ If - переменные составляющие напряжения и тока возбуждения на частоте ωk<218>ω1-ω2
ωk(fk) - полоса пропускания частот, близких к частоте коммутационных циклов (в трехфазном мостовом преобразователе частоты fk = 300 Гц).
Величина σ определяет инерционность обмотки возбуждения, постоянная времени которой определяется из следующего соотношения:
T =
=  , (3) где Ido - постоянная времени в режиме холостого хода генератора (Хс = ∞ ),
, (3) где Ido - постоянная времени в режиме холостого хода генератора (Хс = ∞ ),
Хс, Хd1, Xd - индуктивные сопротивления сети переходное и синхронное генератора соответственно.
Из формулы (3) видим, что на постоянную времени инерции обмотки возбуждения влияет величина индуктивного сопротивления сети, т. е. внешние схемные условия работы генератора.
Использование критерия настройки (2) позволяет осуществлять адаптацию к внешним условиям коэффициента регулирования по производной частоты.
Операции измерения и определения соотношения пульсаций напряжения и тока ротора генератора в предлагаемом способе отвечают критерию "существенные отличия".
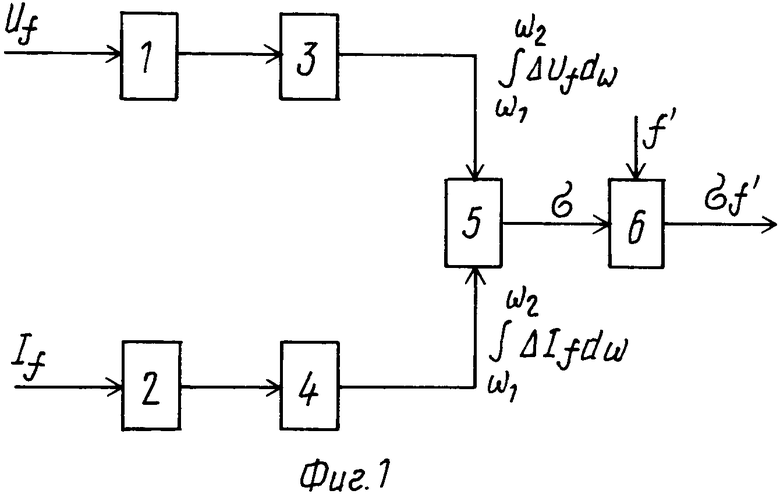
Последовательность проводимых операций раскрывает функциональная структурная схема, приведенная на фиг. 1, где приняты следующие обозначения: 1 - измерение напряжения возбуждения, 2 - измерение тока возбуждения; 3-4 - измерение переменной составляющей; 5 - операция деления, 6 - операция умножения.
Операции осуществляют следующим образом. Измеряют напряжение (1) и ток (2) возбуждения, определяют их переменные составляющие (3) и (4), делят переменные составляющие друг на друга (5), умножают результат операции деления σ на производную частоты f1 (6).
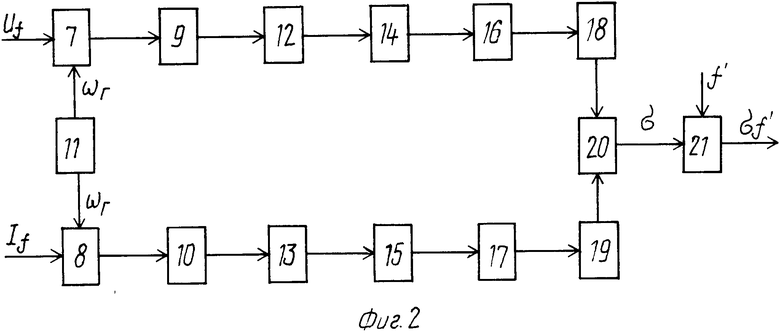
Способ может быть реализован с помощью устройства, принципиальная схема которого приведена на фиг. 2, где 7, 8 - модуляторы, 9, 10 - демодуляторы, 11 - генератор несущей частоты (ωг)ωг≈ 10 ωk, 12, 13 - фильтры низкой частоты (ωфнч<ωг), 14, 15 - полосовые фильтры(ωпф= ωk), 16, 17 - выпрямители, 18, 19 - сглаживающие фильтры, 20 - делитель, 21 - умножитель.
Сигнал Uf поступает на модулятор 7, а сигнал If на модулятор 8, на вторые входы модуляторов 7, 8 приходит сигнал с генератора несущей частоты 11, с выхода модуляторов сигналы приходят на демодуляторы 9, 10, а затем через фильтры низкой частоты 12, 13 и полосовые фильтры 14, 15 - на выпрямители 16, 17, а затем через сглаживающие фильтры 18, 19 - на входы делителя 20, выход делителя соединен с одним из двух входов умножителя 21, на второй вход которого приходит сигнал 8. (56) "Проектирование и исследование систем возбуждения мощных синхронных машин", Л. , ВНИИэлектромаш, 1989, с. 74-83.
Авторское свидетельство СССР N 433614, кл. Н 02 Р 9/14, 1973.
Использование: в электротехнике, для автоматизации настроек регуляторов возбуждения мощных синхронных генераторов. Сущность: способ основан на установлении коэффициентов усиления по отклонениям и производным напряжения и частоты при малых качаниях генератора, увеличении коэффициента усиления по первой производной частоты при больших качаниях, измерении величины пульсаций напряжения и тока ротора, определении по их соотношению инерционности обмотки ротора и изменении коэффициента усиления по первой производной частоты прямо пропорционально изменению инерционности обмотки ротора. 3 з. п. ф-лы, 2 ил.
