Изобретение относится к области автоматического управления и предназначено для использования в системах электропривода постоянного тока, характеризующихся высокими требованиями к стабильности динамических свойств при существенно нестационарных параметрах объекта управления и исполнительного устройства/ в частности тиристорного преобразователя.
Известно устройство для управления электроприводом, содержащее масштабирующий сумматор и последовательно соединенные идентификатор состояния объекта, измеритель ошибки и блок формирования сигнала управления, выход которого подключен к входу системы управления электропривода .
Недостатком указанного устройств является нарушение работы идентиф катора при значительном изменении параметров .объекта и (или) при их изменении со скоростями, сравнимыми с быстродействием основного контура управления по ошибке, а также при существенном влиянии нелинейностей
Известно устройство для управления электроприводо содержгицее последовательно соединенные второй измеритель ошибки, формирователь сигнсша коррекции и блок масщтабных коэффициентов, выход которого подключен к входу идентификатора состояния объекта. Посредством вводимых блоков образуется второй дополнительный контур коррекции идентификаторов, что позволяет расширить область применения устройства в условиях переменности его параметров 2 -..
недостатком известного устройства является невозможность получения высокой динамической точности а также широкого диапазона регулирования частоты вращения вала двигателя.
Наиболее близким по техническому решению к предлагаемому является устройство для управления электроприводом, содержащее последовательно соединенные этгшонную модель, сумматор, первый масштабный усилитель и нелинейный элемент, который включен между выходом и входом первого масштабного усилителя з .
Недостатком этого стрбйства является нарушение устойчивости в условиях параметрических и аддитивных возмущений, кроме того, малая помехозащищенность устройства снижает надежность всей системы в целом.
Цель изобретения - повышение бысродействия системы, расширение диапазона регулирования частоты вращения вала двигателя в условиях параметрических и аддитивных возмущений .
Поставленная цель достигается тем, что в устройство для управления электроприводом, содержащее последовательно соеданенные эталонную модель, первый, сумматор, первый масштабный усилитель, между выходом и вторым входом которого включен нелинейный элемент, последовательно
соединенные второй сумматор, интегратор, второй масштабный усилитель, выход которого соединен с вторым входом первого сумматора и первым входом второго сумматора, причем 15 вход эталонной модели является первым входом устройства, третий вход первого сумматора является вторым входом устройства, а выход первого масштабного усилителя является 20 выходом устройства, дополнительно введены звено с пропорциональноинтегральной характеристикой, последовательно соединенные блок сравнения, релейный элемент и фильтр, 25 выход которого подключен к пятому входу первого сумматора, первый вход блока сравнения соединен с выходом интегратора, а второй вход с третьим входом первого сумматора, выход релейного элемента подключен к третьему входу второго сумматора, причем выход звена с пропорционально-интегральной характеристикой соединен с вторым входом второго сумматора и с четвертым входом 5 первого сумматора, а вход с первым входом устройства.
На чертеже изображена блок-схема устройства для управления электро. приводом.
0 Устройство содержит эталонную модель 1, первый сумматор 2, первый масштабный усилитель 3, нелинейный элемент 4, второй сумматор 5, интегратор б, второй масштабный усили5 тель 7, звено с пропорциональноинтегральной характеристикой 8, блок сравнения 9, релейный элемент 10, фильтр 11.
Устройство для управления элект0 Роприводом работает следующим образом.
Задающий сигнал, поступающий на первый вход устройства и являющийся одновременно управляющим сигналом . для регулируемого электропривода 5 подается на эталонную модель 1, реализованную .в виде апериодического звена, на выходе которой формируется сигнал, соответствующий устойчивому с предельным быстродействием 0 виду переходного процесса в электроприводе при стандарт ном скачкообразном воздействии, и его первая производная, и на звено с пропорционально-интегральной характе5 ристикой 8, с выхода которого сигнал поступает на второй вход второго сумматора 5, образующего в сово купности с интегратором 6 и вторым масиатабным усилителем 7, выход кото рого замкнут на первый вход второго сумматора, устройство оценки производной регулируемого сигнала. Оце ка производной получается на выходе второго сумматора 5. На второй вход устройства поступает сигнал с датчика обратной связи, пропорциоральный выходной координате электропривода, и подается на второй вход блока сравнения 9, на первый вход которого поступает оценка сигнала с датчика обратной связи, и на пятый вход первого сумматора 2. Блок сравнения 9 вырабатывает ошибк между реальным сигналом датчика обратной связи и его оценкой, которая подается на релейный элемент 10, выход которого замкнут на третий вход второго, сумматора 5. Обозначим: i сигнал, пропорцио нальный току в цепи якоря, пос т пающий на второй .вход устройства, 4 - сигнал на выходе интегратора б . Алгоритмработы контура, образованного блоками S, 6, 9 и 10, пост роен так, что при О релейный элемент 10 переключается в такое положение,, что величина сигнала k уменьшается, и через некоторый малый промежуток времени выполняется условие i - ч О . Таким образом в системе, состоящ из блоков 5, 6, 9-и 10, существует скользящий режим, при котором справедливо равенство t (1) На выходе релейного элемента 10 имеем сигнал ошибки е c-Ct-O, где с - коэффициент пропорционгшьности, который получается вследствие влияния параметрических и аддитивных воздействий на систему электропривода. При изменении знака сигнала е относительно начального происходит переключение релейного элемента 10, и сигнал ошибки 6 с обратным знаком компенсирует влияние параметрыческого воздействия. На выходе второго сумматора 5 ; получается оценка производной сигнала с датчика обратной связи (тока с учетом компенсирующего сигнала ошибки е . Сигнал 6 вносит в оценк производной помехи, поступающие олновременно с полезным сигналом на второй вход устройства. Наличие помех приводит к нарушению функционирования системы (снижается точность, быстродействие). Для выделения сигнала оценки производной при сохранении динамических свойств системы используется первый сумматор 2, на входы которого поступают сигналы с второго масштабного усилителя 7, со звена с пропорционально-интегральной характеристикой 8, с релейного элемента 10, который фильтруется фильтром 11. Таким образом, фильтрация сигнала ошибки е с выхода релейного элемента 10, а не с датчика обратной связи (тока), как это обычно делается, позволяет сохранить, а иногда и увеличить быстродействие системы и ее диапазон регулирования. На выходе первого сумматора вырабатывается сигнал 9 .)), весовые коэффициенты; Хд - сигнсШ с эталонной моде. ли 1, XM- сигнал первой производной, i - сигнал, поступающий на второй вход устройства с дат;j чика обратной связи; - сигнал оценки производной с датчика обратной связи, вырабатываегллй первым сумматором 2, который подается на масштабный усилитель 3. Вьрсодной сигнал с устройства управления электроприводом подается на регуляторы объекта управления (электропривод). Поясним работу устройства управления электроприводом при параметрическом воздействии. Положим, что произошел наброс нагрузки по моменту статических сопротивлений, ток в двигателе возрос. Информация об изменении тока поступает на второй вход устройства. Блок сравнения 9 вырабатыпает сигнги: ошибки е между и (равенство (1) нарушается) и релейный элемент 10 занимает одно из двух возможных состояний. Сигнал ошибки е производит коррек1гию оценки производной тока якоря t . Скорректированная с учетом наброса нагрузки оценка производной i поступает на блоки 2, 3 и 4, которые вырабатывают сигнал, поступающий на систему управления электроприводом, компенсирующий изменение момента нагрузки. Ток в двигателе убывает, это приводит к переключению релейного элемента 10 в другую сторону, а так как в контуре 5, 6, 9 и.10 существует скользящий режим, то восстанавливается равенство (1) и ток в якоре двигателя.
510611056
Предлагаемое устройство по срав- зон регулирования частоты вращенению с известными повышает быстро- ния вала двигателя в условиях падействие системы, расширяет диапа- раметрических и аддитивных возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1984 |
|
SU1187149A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Устройство для стабилизации положения плазменного шнура в токамаке | 1986 |
|
SU1418817A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Устройство для управления электроприводом | 1984 |
|
SU1196811A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ, содержащее последовательно соединенные эталонную модель, первый сумматор, первый масштабный усилитель, между выходом и вторым входом которого включен нелинейный элемент, последовательно соединенные второй сумматор, интегратор, второй масштабный усилитель, выход которого соединен с вторым входом первого сумматора и первым входом второго сумматора. вход эталонной модели является первым входом устройства,третий вход первого сумматора является вторым входом устройства, а выход первого масштабного усилителя является выходом устройства, о т л и .4 а ю щ е е с я тем, что, с целью повышения быстродействия системы, расширения диапазона регулирования частоты вращения вала двигателя в условиях параметрических и аддитивных возмущений, в него дополнительно введены звено с пропорционально-интегральной характеристикой , последовательно соединенные блок сравнения, релейный . i элемент и фильтр, выход которого подключен к пятому входу первого (Л сумматора, первый вход блока сравнения соединен с выходом интеграс тора, а второй вход - с третьим входом первого сумматора, выход релейного элемента подключен к третьему входу сумматора, причем выход звена с пропорциональноинтегральной характеристикой соединен с вторым входом второго суммаа: тора и с четвертым входом первого сумматора, в вход с первым входом устройства. ел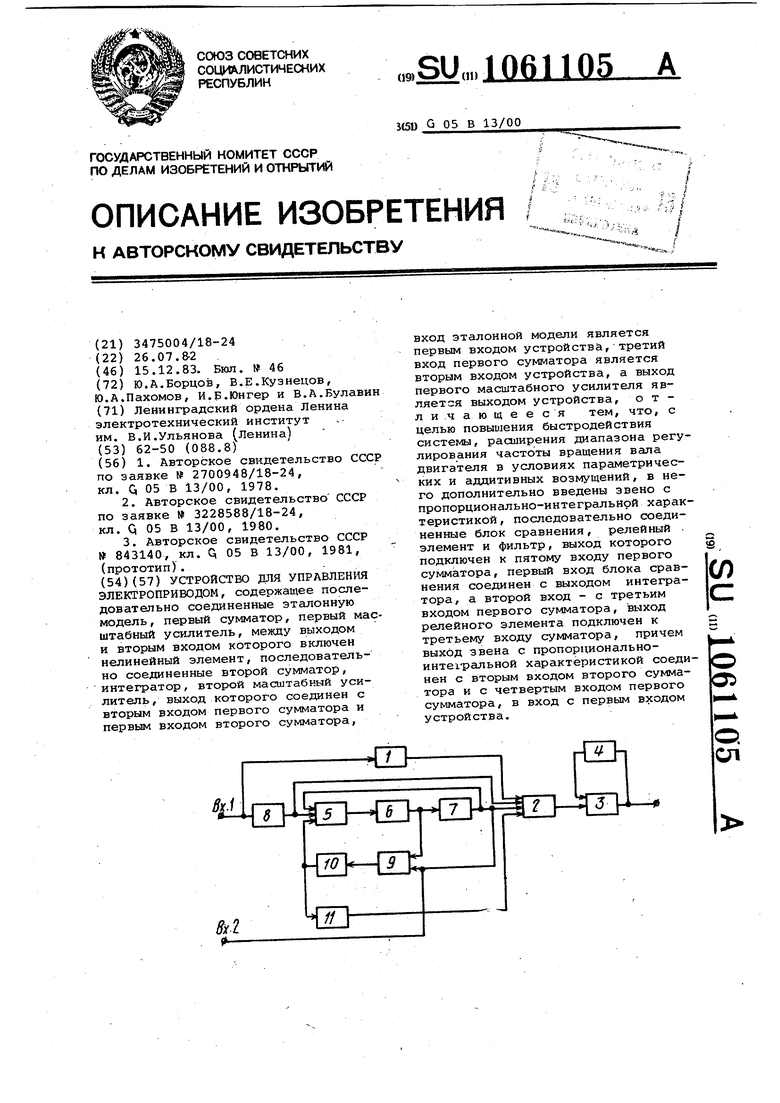
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ДВУХСТОРОННИЙ ВОДОДЕЛИТЕЛЬ ДЛЯ КАНАЛОВ С БОЛЬШИМ УКЛОНОМ | 2019 |
|
RU2700948C1 |
| G, 05 В 13/00, 1978 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
