Изобретение относится к электротехнике.
Известный электропривод [1] содержит последовательно соединенные выпрямитель, датчик тока, электродвигатель, тахогенератор, преобразователь в цепи обмотки возбуждения и нелинейный преобразователь.
Недостаток устройства состоит в относительно низком КПД.
Наиболее близким по технической сущности и достигаемым результатам является электропривод постоянного тока [2] , содержащий электродвигатель, подключенный к тиристорному выпрямителю, последовательно соединенные блоки уставки, регулятор частоты вращения и регулятор тока, выход которого подключен ко входу тиристорного выпрямителя, датчики тока и частоты вращения, выходы которых подключены ко входам обратных связей соответственно регулятора тока и регулятора частоты вращения, возбудитель, выход которого подключен к выходам обмотки возбуждения электродвигателя.
Недостаток устройства состоит в относительно больших потерях энергии, так как не учитываются потери энергии в сети и прежде всего потери, вызванные потреблением реактивной мощности.
Цель изобретения состоит в снижении потерь энергии.
Цель достигается за счет того, что в электропривод введен сумматор, выход которого соединен со входом возбудителя, блок воздействия в четвертую степень, квадратор, датчик потока и три умножителя, выход первого и второго из которых соединены со входами сумматора непосредственно, а третьего через квадратор, первый вход первого умножителя соединен с выходом блока возведения в четвертую степень, вход которого соединен с датчиком по току, первые входы которого и третьего умножителей соединены с выходом датчика потока и входом блока возведения в четвертую степень, второй вход третьего умножителя соединен с выходом датчика тока, вторые входы первого и второго умножителей соединены через соответственно первый и второй функциональные преобразователи со входом датчика частоты вращения, причем первый и второй функциональные преобразователи реализуют соответственно следующие функциональные зависимости
U1= a+ b ωd;
U2 =  , где ω- частота вращения;
, где ω- частота вращения;
a, b, d - константы;
ωо - частота вращения идеального холостого хода.
Существенные отличия предложенного технического решения состоят в том, что учитывается составляющая потерь, связанная с перетоком реактивной мощности в сети. Как известно, потери энергии в сети пропорциональны реактивной мощности. В данном предложении производится учет этой составляющей энергии.
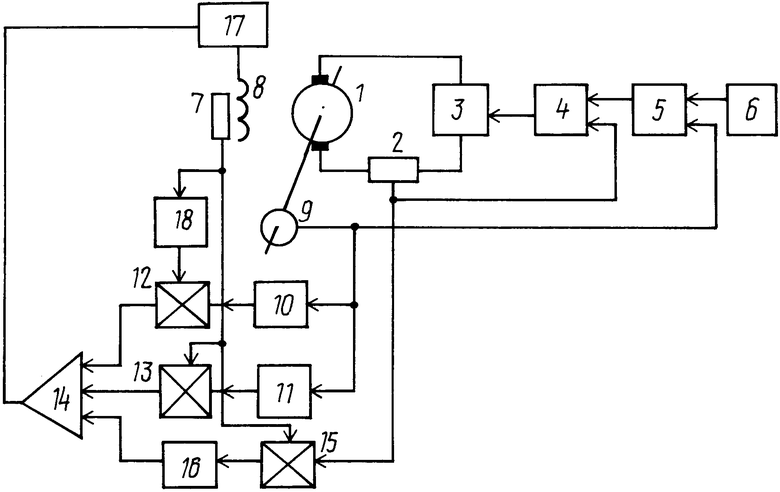
На чертеже приведена схема устройства.
Двигатель 1, датчик 2, тиристорный выпрямитель 3, регулятор 4 тока, регулятор 5 частоты и блок 6 уставки включены последовательно. Датчик 7 потока установлен рядом с обмоткой 8 возбуждения. Тахогенератор 9 соединен с регулятором 5 частоты, первым 10 и вторым 11 функциональными преобразователями, которые через умножители 12, 13 связаны с сумматором 14. Умножитель 15 через квадратор 16 связывает выход тахогенератора 9 и датчика 17 потока с входом сумматора 14. Выход последнего связан с возбудителем 17, соединенным выходом с обмоткой 8 возбуждения. Датчик потока 7 соединен также с блоком 18 возведения в 4-ю степень.
Устройство работает следующим образом.
Двигатель 1 работает с регулируемой частотой вращения. Регулирование частоты осуществляется изменением сигнала уставки, поступающим с выхода блока 6. Регулятор 5 сравнивает этот сигнал с действительным значением частоты, поступающим с выхода тахогенератора 9, и вырабатывает регулирующее воздействие на стабилизацию частоты. Этот сигнал через регулятор 4 поступает на управление тиристорным выпрямителем 3, изменяющим величину напряжения якоря. Этот канал регулирования (частоты) обладает высоким быстродействием. Наряду с этим имеется второй канал регулирования возбуждения. Этот канал обладает значительно меньшим быстродействием (на порядок). Поэтому работа этого канала проявляется в основном в установившихся режимах.
Усилитель 14 устанавливает значение напряжения возбудителя 17, при котором электропривод работает с минимальными потерями электроэнергии. Для этого сумматор 14 имеет интегральные свойства (типа ПИ или И регулятора).
Покажем условия, при которых достигается минимум потерь энергии.
Переменные потери энергии [2]
ΔP1= R + C
+ C f(ω)U
f(ω)U
и постоянные потери энергии
ΔP2= aΦ2+bωdΦ2+KMωn, где R - сопротивление якорной цепи;
М, Φ, ω- момент, поток и частота вращения двигателя;
С - коэффициент перевода реактивной мощнсти в потери энергии (С≈0,1-0,3 кВт/кВар);
b - коэффициент потерь в стали;
d= 1,2-1,5;
n - коэффициент механических потерь,
n≈1-1,5, a = R
Здесь RB - сопротивление обмотки возбуждения; - тангенс наклона характеристики намагничивания;
- тангенс наклона характеристики намагничивания;
f(ω) - зависимость относительной реактивной составляющей тока от напряжения якоря или что практически тоже от скорости.
U - максимальное напряжение выпрямителя;
- максимальное напряжение выпрямителя;
ωо - скорость идеального холостого хода двигателя при U .
.
Например, для симметричного управляемого выпрямителя
f +
+ = 1
= 1
Минимум потерь достигается при

 , что достигается при
, что достигается при
условии Φ4(a+bωd)- -RM2= 0
-RM2= 0
. На выходе преобразователей 10 и 11 формируются сигналы U1= a+ bωd и U2=  соответственно. Усилитель 14 осуществляет решение последнего уравнения. В случае отклонения упомянутого равенства от нуля на выходе усилителя 14 появляется сигнал, который изменяет значение потока в сторону, вызывающую исчезновение неравенства нулю суммы входных сигналов. Таким образом благодаря нелинейному преобразованию сигнала в блоке 11, пропорционального напряжения или что тоже частоте вращения учитывается потребление реакционной мощности и связанные с ней потери энергии в сети. Благодаря этому снижаются суммарные потери энергии. (56) 1. Ильинский Н. Ф. и др. Энергосбережение в электроприводе. М. : Высшая школа, 1989, с. 90, рис. 81.
соответственно. Усилитель 14 осуществляет решение последнего уравнения. В случае отклонения упомянутого равенства от нуля на выходе усилителя 14 появляется сигнал, который изменяет значение потока в сторону, вызывающую исчезновение неравенства нулю суммы входных сигналов. Таким образом благодаря нелинейному преобразованию сигнала в блоке 11, пропорционального напряжения или что тоже частоте вращения учитывается потребление реакционной мощности и связанные с ней потери энергии в сети. Благодаря этому снижаются суммарные потери энергии. (56) 1. Ильинский Н. Ф. и др. Энергосбережение в электроприводе. М. : Высшая школа, 1989, с. 90, рис. 81.
2. Лебедев Е. Д. Управление вентильными электроприводами постоянного тока. М. : Энергия, 1980, с. 97. рис. 42.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1990 |
|
SU1774451A2 |
| Способ пуска двух синхронных двигателей | 1988 |
|
SU1571740A1 |
| ЭЛЕКТРОПЕРЕДАЧА ПУЛЬСИРУЮЩЕГО ТОКА | 1992 |
|
RU2007813C1 |
| Электрическая сеть | 1988 |
|
SU1628134A1 |
| Устройство для моделирования электромагнитной муфты скольжения | 1980 |
|
SU955115A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Вентильный электропривод | 1990 |
|
SU1697251A1 |
| Устройство для регулирования привода черпаковой цепи многочерпакового земснаряда | 1983 |
|
SU1150312A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
Использование: может быть использовано в электроприводах общепромышленных механизмов. Сущность: в данном электроприводе уменьшение потерь энергии достигается введением в систему нелинейного преобразования сигнала, пропорционального частоте вращения, учитывающее потребление реактивной мощности. 1 ил.
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель, подключенный к тиристорному выпрямителю, последовательно соединенные блок уставки, регулятор частоты вращения и регулятор тока, выход которого подключен к входу тиристорного выпрямителя, датчики тока и частоты вращения, выходы которых подключены к входам обратных связей соответственно регулятора тока и регулятора частоты вращения, возбудитель, выход которого подключен к выводам обмотки возбуждения электродвигателя, отличающийся тем, что, с целью повышения КПД, в него введены сумматор, выход которого соединен с входом возбудителя, блок возведения в четвертую степень, квадратор, датчик потока и три умножителя, выходы первого и второго из которых соединены с входами сумматора непосредственно, а третьего - через квадратор, первый вход первого умножителя соединен с выходом блока возведения в четвертую степень, вход которого соединен с датчиком потока, первые входы второго и третьего умножителей соединены с выходом датчика потока и входом блока возведения в четвертую степень, второй вход третьего умножителя соединен с выходом датчика тока, вторые входы первого и второго умножителей соединены через соответственно первый и второй функциональные преобразователи с входом датчика частоты вращения, причем первый и второй функциональные преобразователи реализуют соответственно следующие функциональные зависимости:
Uф.п1 = a + b ωc,
U =
=  ,
,
где ω - частота вращения;
a, b, c - константы;
ω0 - частота вращения идеального холостого хода.
