Фиг.1
Изобретение относится к электротехнике и используется в регулируемом электроприводе.
Известный электропривод содержит последовательно соединенные задатчик, регуляторы скорости и тока, преобразователь датчика тока, двигатель, тахогенера- тор, причем выход тахогенератора соединен с вторым входом регулятора скорости, а датчика тока - с вторым входом регулятора тока с включенными пороговым элементом, дифференциатором и одновмб- ратором, выход одновибратора подключен к второму входу преобразователя, а входы порогового элемента соединены с задатчи- ком и тахогенератором.
Недостаток устройства - плохие динамические свойства, относительно низкий КПД, что объясняется перерегулированием 5-8% при оптимизации системы, при изменении (колебаниях) статического момента нагрузки.
Целью изобретения является повышение КПД и улучшение динамики.
Цель достигается за счет того, что электропривод снабжен дифференциатором и блоком умножения, включенными последовательно между тахогенератором и вторым входом тиристорного преобразователя, а второй вход блока умножения соединен с выходом одновибратора.
Отличие состоит в том, что электропривод снабжен последовательной RC-цепыо и ключом, присоединенными к выходу дифференциатора, диодом, шунтирующим резистор, и формирователем, включенным между выходом одновибратора и входом ключа.
Сущность изобретения состоит в том, что по окончании разгона-двигателя до заданного значения скорости одновибратор формирует импульс требуемой интенсивности, способствующий резкому сбросу тока якоря двигателя до статической величины. Это и исключает перерегулирование.
В известных источниках информации отсутствует описание электропривода, обладающего отмеченными отличиями.
На фиг.1 и 2 приведены схемы устройства, Задатчик 1 скорости, регулятор 2 скорости, регулятор 3 тока, тиристорный преобразователь 4, датчик 5 тока, двигатель 6, тахогенератор 7 соединены последовательно. Выход тахогенератора 7 подключен к второму входу регулятора 2 скорости, а датчик 5 тока соединен с вторым входом регулятора 3 тока. Пороговый элемент 8, формирователь 9, одновибратор 10. блок 11 умножения включены последовательно. К выходу тахогенерэтора 7 подключен дифференциатор 12, который соединен выходом с входом блока 11. На фиг.2 параллельно второму входу блока 11 умножения включены цепи: конденсатор 13, резистор 14 и ключ
15. К входной цепи ключа 5 подключен выход второго формирователя 16, входом соединенного с выходом одновибратора 10. Резистор 14 шунтирован диодом 17,
Электропривод работает следующим
образом.
Двигатель 6 получает питание от преобразователя 4. Скорость двигателя 6 задается сигналом задатчика 1. Регулятор 2 скорости сравнивает сигнал установки с
сигналом тахогенератора 7, измеряющего действительное значение скорости. По результатам этого сравнения вырабатывается сигнал уставки регулятору 3 тока, который сравнивает эту уставку с действительным ,
значением тока, измеряемого датчиком 5. Регулятор 3 тока вырабатывает сигнал управления тиристорами преобразователем 4, В конце процесса разгона двигателя ток двигателя практически равен пусковому и
спадает относительно медленно, что обусловлено инерционностью преобразователя и индуктивностью якорной цепи. Поэтому даже в оптимально настроенных системах перерегулирование скорости составляет 58%. В предложенном электроприводе з момент (или немного раньше) сравнения сигнала задатчика 1 с сигналом тахогенератора 7 переключается из нулевого состояния в единичное пороговый элемент 8.
Дифференциатор 12 формирует узкий импульс, который запускает одновибратор 10. Последний создает импульс, который на входе преобразователя 4 вычитается из выходного сигнала регулятора тока, Под действием этого импульса отклонение напряжения преобразователя происходит по закону
.1-ехр(-|)
при 0 t ti/i,
где К - коэффициент усиления;
DH - амплитуда импульса;
Т-постоянная времени преобразователя;t - текущее время.
Для быстрого спадания тока якоря двигателя 6 до нуля необходим импульс, определяемый из соотношения
1и
S AUdt« L(ln -1ст)ил, о
где 1П, ст, 1д - пусковое, статическое и динамическое значения тока;
L - индуктизность якорной цепи.
Схемы используются при изменении статического тока в больших пределах. Дифференциатор 12 осуществляет дифференцирование скорости со сглаживанием, определяя тем самым динамический ток. (Предполагается, как это и имеет место в большинстве случаев, что статический ток не зависит от скорости). Это значение поступает на блок 11 умножения. Поэтому сигнал, поступающий на вход преобразователя 4, по амплитуде изменяется пропорционально динамическому току. При этом используется тот факт, что дифференциатор 12 выполнен со сглаживанием, поэтому, обладая запаздыванием, сохраняет значение динамиче- ского тока на этапе формирования импульса одновибратора 10.
В схеме на фиг.2 конденсатор 13 запоминает значение динамического тока на основной части этапа разгона двигателя. Это значение управляет режимом работы блока 11 умножения на этапе формирования импульса одновибратора 10. По окончании работы одновибратор 10 по его заднему фронту вторым формирователем 16форми- рует импульс, включающий ключ 15, осуществляющий сброс конденсатора 13.
Таким образом, схемы на фиг.1 и 2 более полно учитывают условия работы электропривода.
Благодаря формированию импульса одновибратора обеспечивается форсированное снижение тока двигателя 6, что исключает перерегулирование. Снижение перерегулирования уменьшает расход электроэнергии, улучшает динамические свойства электропривода, что и является положительным эффектом предложения.
Формула изобретения
1.Электропривод постоянного тока по авт.св. № 1577046, отличающийся тем, что, с целью повышения КПД и улучшения динамических характеристик, он дополнительно снабжен дифференциатором и блоком умножения, , включенными последовательно между тахогенератором и вторым входом тиристорного преобразователя, а второй вход блока умножения соединен с выходом одновибратора.
2.Электропривод по п.1 отличающийся тем, что он снабжен последовательной RC-цепыо и ключом, присоединенными к выходу дифференциатора, диодом, шунтирующим резистор, и формирователем, включенным между выходом одновибратора и входом ключа.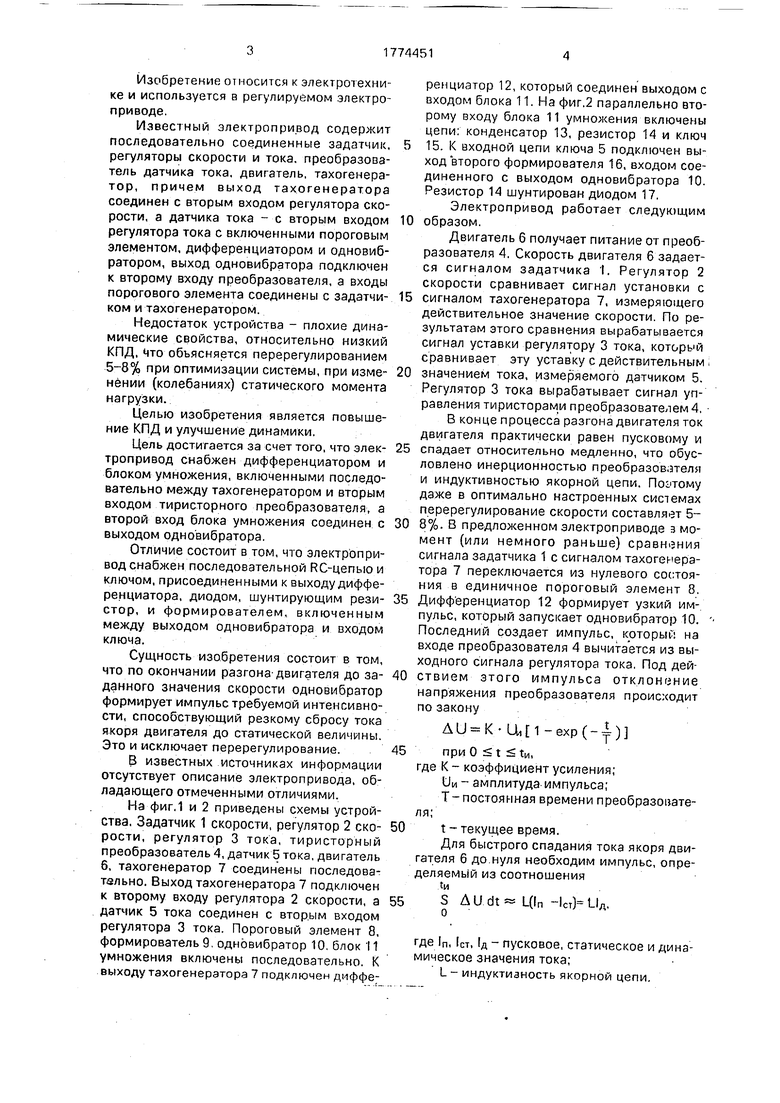
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Способ управления тиристорным электроприводом постоянного тока и устройство для его осуществления | 1982 |
|
SU1061227A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2079963C1 |
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2280315C2 |
| Устройство для защиты электропривода | 1979 |
|
SU864475A1 |
| ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2046536C1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Электропривод постоянного тока | 1979 |
|
SU917291A1 |
| Реверсивный электропривод постоян-НОгО TOKA | 1979 |
|
SU849399A1 |
Использование: в регулируемом электроприводе. Сущность: устройство содержит структуру подчиненного управления, состоящую из последовательно включенных задатчика 1, регулятора 2 скорости, регулятора 3 тока, тиристорного преобразователя 4, датчика 5 тока, тахогенератора 7 и дифференциатора 12 (выполняет роль датчика динамической составляющей тока). В конце процесса пуска срабатывает пороговый элемент 8, который через формирователь 9 запускает одновибратор 10. Последний формирует импульс, снижающий перерегулирование скорости. Импульсный сигнал корректируется в умножителе 11. В данном устройстве повышается КПД и улучшается динамика. 1 з.п. ф-чы, 2 ил.
| Электропривод постоянного тока | 1988 |
|
SU1577046A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
