1
Изобретение относится к физическому моделированию, а именно для моделирования электропривода с электро- . магнитной муфтой и скольжения при проведении исследований различных режимов ее работы.
Известны устройства для физического моделирования первичных двигателей (дизель, паровая турбина), которые имитируются сортветствующей системой электропривода ij .
В указанных устройствах используется принцип функционального моделирования, гтри котором модель и оригинал не подобны в целом, так как опущены подробности, связанные с конкретным материальным воплощением моделирующего объекта.
Однако эти устройства не учитывают особенностей электромагнитной муфты скольжения.
Наиболее близким по технической сущности к предлагаемому является
устройство, содержащее систему гене- , ратор - двигатель постоянного
Недостатком известной системы является низкая точность моделирования электромагнитной муфты скольжения.
Цель изобретения - повышение точ ности моделирования.
Для достижения Цели в устройство
fO для моделирования электромагнитной муфты -скольжения, содержащее привод- ной электродвигатель, выходной вал которого кинематически соединен с генератором постоянного тока, один
15 вывод якоря которого соединен с одним выводом якоря электродвигателя постоянного тока, кинематически связанного с тахогенератором, выход которого соединен с первым входом
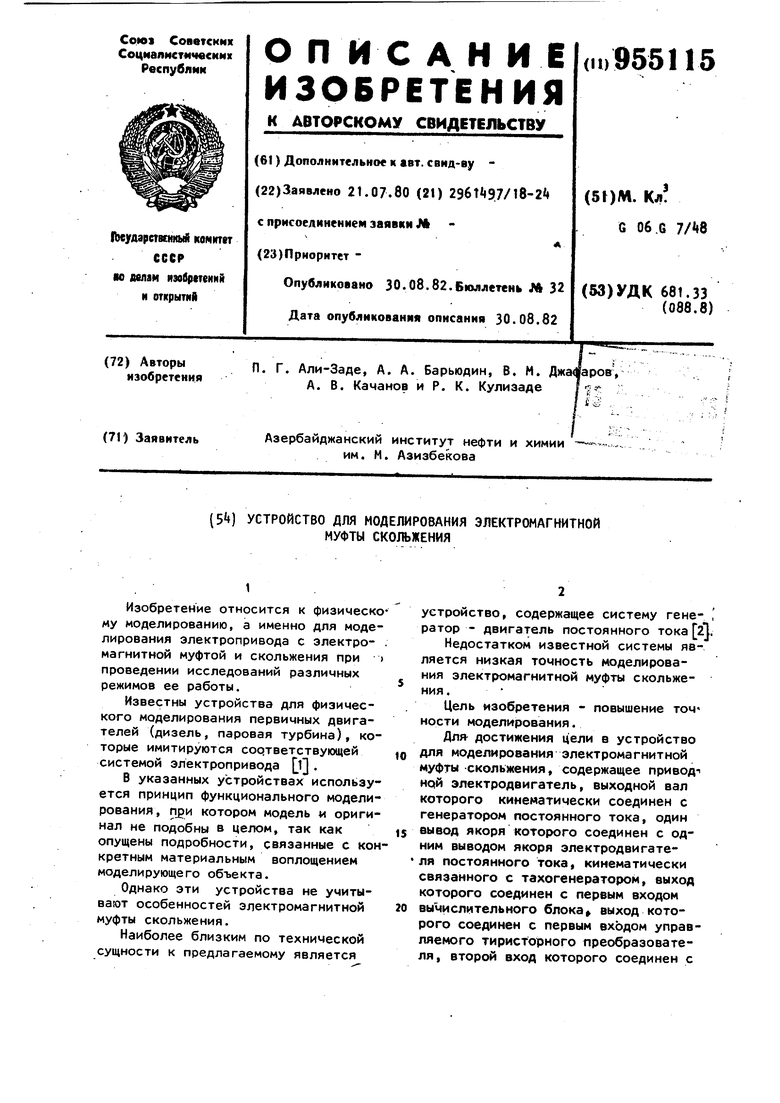
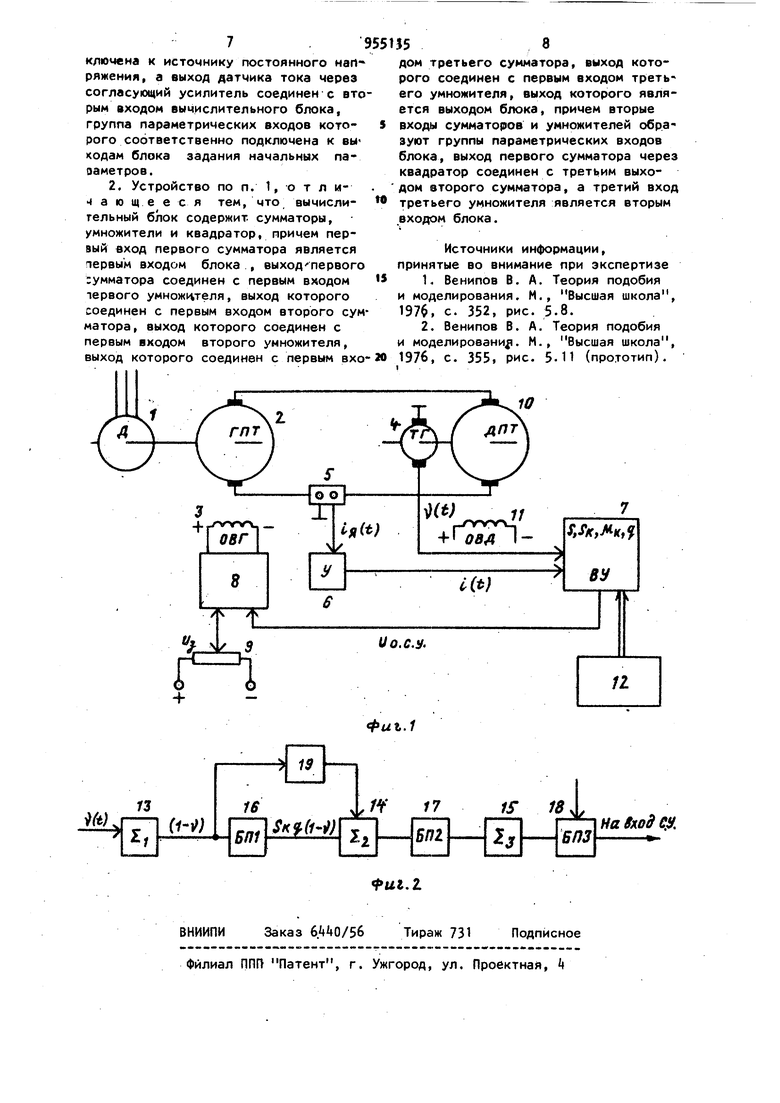
20 вычислительного блока выход которого соединен с первым входом управляемого тиристорного преобразователя, второй вход которого соединен с 3955 задатчиком постоянного напряжения, а выход управляемого тиристорного преобразователя соединен с обмоткой возбуждения генератора постоянного тока, дополнительно введен блок зада- $ ния начальных параметров, датчик ттка и согласующий усилитель, причем другой вывод якоря генератора посто янного тока через датчик тока соеди- . ней с другим выводом якоря злектро- 10 двигателя постоянного тока, обмотка возбуждения которого подключена к источнику постоянного напряжения, а вы- . ход датчика тока через согласующий усилитель соединен с вторым входом 15 вычислительного блока, группа параметрических входов которого соответственно подключена к выходам блока задания начальных параметров, а вычислительный блок содержит сумматоры, 20 умножители и квадратор, причем первый, вход первого сумматора является первым входом блока, выход перВОГО1сумматора соединен с первым входом первого умножителя, выход кото- ZS рого соединен с первым входом второго сумматора, выход которого соединен в первым входом второго умножителя, выход которого соединен с первым входом третьего сумматора, выход ко- jo торого соединен с первым входом тьего умножителя, выход которого является выходом блока, причем вторые входы сумматоров и умножителей образуют группу параметрических входов jj блока, выход первого сумматора через квадратор соединен с третьим входом второго сумматора, а третий вход третьего умножителя является вторым входом блока. 40 Особенности изобретения ясны из анализа следующих зависимостей. Как известно, уравнение механической характеристики в системе генератор-двигатель (ГгД) с обратной j связью по току при постоянстве потока возбуждения двигателя имеет вид (в относительных единицах) .e,,.uAU3o.k..k,.K;ij3V ; ; е -Л.у - вн гн UBH U H Q;;; w. 1 - г-ЭKt rIfl.H -iJ.J (2.(s«fUK - (i, SS . 1),- относительные начальные значения ЭДС генератора и напряжения его возбуждения; УЗ - относительное значение задающего сигнала; k, k - постоянные коэффициенk . - коэффициенты усиления генератора по задающему сигналу; k(. - коэффициент усиления генератора по напряжению;kj - коэффициент усиления обратной.связи по току; S - номинальное скольжение системы Г-Д; 5ф - фиктивное скольжение; - относительное значение скорости. еханическая характеристика электгнитной муфты скольжения (ЭМС) носительных единицах имеет вид (24С1,)(и.Зк. 3HC--.,)S (i)()чsl араметры S , Su,, q рассчитывапо формулам, известным из теоэлектрических машин для конкой системы Г-Д и ЭМС, и вводятся де постоянных коэффициентов. s,...Dg:.G,- ыражение получено из формулы .(2 + д) fUk -I- з сравнения (1 ) (2) получаем .. -Sr-o-ero- rK.Ugo er-Viv a и,н )и-9)%б,яи-)5. . ,. . (U h-;l)S9,((-t.9)tsJ 5r-o l1) (i-), - l - r-ol-Sr-o. U)S,(u, 5 Таким образом, для обеспечения подобия моментно-скоростных характеристик Г-Д -И ЗМС необходимо иметь . постоянное задающее напряжение U(3) и переменный коэффициент усиления К С) , зависящий от скорости вращения. На фиг. 1 представлена общая схема модели ЭМС; на фиг. 2 - схема вычислительного блока. Устройство содержит приводной двигатель 1, генератор 2 постоянного тока с обмоткой 3 возбуждения, тахогенератор k скорости, датчик 5 тока, согласующий усилитель 6, вычислитель ный блок 7, управляемый тиристорный преобразователь 8, задатчик 9 постоянного напряжения , двигатель 10 пос тоянного тока с обмоткой 11 возбужде ния и блок 12 задания начальных пара метров. Вычислительный блок 7 содержит сумматоры 13, I и 15, умножители 16, 17 и 18 и квадратор 19. Устройство работает следующим образом. Двигатель Ю постоянного тока имеет постоянное возбуждение. Регули руемое возбуждение генератора 2 осуществляется от управляемого тиристор ного преобразователя 8. На вход пода ется задающее напряжение U в соот ветствии с выражением (З). Сигнал обратной связи с датчика 5 тока чере усилитель 7 поступает на вход вычислительного блока 7) на другой вход которого поступает сигнал от тахогенератора t. В вычислительном блоке 7 в зависимости от задаваемых параметров, определяемых конкретной системой Г-Д (S), и электромагнитной муфтой скольжения (Sj,iiij,, q ) производится преобразование в соответствии с выражением H--)Sll-0 S C 45 ll-5)-S-Sj,-{U,,U4() 12-П)ц5к и осуществляется изменениесигнала обратной связи , который с выхода вычислительного блока проходит на второй аход управляемого тиристорного преобразователя. Сигнал с тахогенератора -Q (t) поступает на первый вход сумматора 13, на второй вход которого подается единичный опорный сигнал (-1). С выхода сумматора 13 сигнал (1-0) проходит на квадратор 13, на вход первого умножителя 16, на второй вход 54 которого подается параметр-сомножитель SKQ. . После перемножения сигнал Sj-(v(1-) поступает на вход второ: о умножителя 17, на второй вход которого подается параметр k 1-5 /(2+q)x xSyjn, , и после перемножения сигнал, определяемый выражением (1-)+ (1-9) (2+q) S fU, проходит на вход третьего сумматора 15, на второй вход которого подается параметр kj ST.Q - Rp 1д„/Е,„. Дальше сигнал с выхода сумматора 15 поступает на вход умножителя 18, на второй вход которого подается параметр k4.U./k,-lj,, а на третий - сигнал i(t) с выхода усилителя, и с выхода умножителя 18 сигнал обратной связи поступает на вход управляемого тиристорного преобразователя. Выполнение устройства в соответствии с изобретением характеризуется гибкостью в управлении и универсальностью, которые определяются возможностью исследований систем автоматизированного электропривода с различными ЭМС. Формула изобретения 1. Устройство для моделирования электромагнитной муфты скольжения, содержащее приводной электродвигатель, выходной вал которого кинематически соединен с генератором постоянного тока, один вывод якоря которого соединен с одним выводом якоря электродвигателя постоянного тока, кинематически связанного с тахогенератором, выход которого соединен с первым входом вычислительного блока, выход которого соединен с первым входом управляемого тиристорного преобразователя, второй вход которого соединен с задатчиком посто янного- напряжения, а выход управ ляемого тиристорного преобразователя соединен с обмоткой возбуждения генератора постоянного тока, отличающееся тем, что, с целью повышения точности Моделирования, в него дополнительно введены блок задания начальных параметров, датчик тока и согласующий делитель, причем другой вывод якоря генератора постоянного тока через .датчик тока соединен с другим выводом якоря )лектродвигателя постоянного тока, )бмотка возбуждения которого подкяючена к источнику постоянного напряжения, а выход датчика тока через согласующий усилитель соединен с вторым входом вычислительного блока, группа параметрических входов которого соответственно подключена к вы кодам блока задания начальных паоаметров.
2. Устройство по п. 1, о т л а ю щ е е с я тем, что, вычислительный блок содержит сумматоры, умножители и квадратор, причем первый вход первого сумматора является первым входом блока , выходпервого :умматора соединен с первым входом первого умножителя, выход которого соединен с первым входом второго сумматора, выход которого соединен с первым входом второго умножителя, выход которого соединен с первым входом третьего сумматора, выход которого соединен с первым входом третьего умножителя, выход которого является выходом блока, причем вторые входы сумматоров и умножителей образуют группы параметрических входов блока, выход первого сумматора через квадратор соединен с третьим выходом второго сумматора, а третий вход третьего умножителя является вторым .входом блока.
Источники информации, принятые во внимание при экспертизе
1. Венипов В. А. Теория подобия
Высшая школа, и моделирования. М, 5.8. 197$, с. 352, рис
Теория подобия
2. Венипов В. А. Высшая школа. и моделирование. М.
1976, с. 355, рис. 5.11 (прототип).
. 


| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011287C1 |
| Электропривод постоянного тока | 1989 |
|
SU1656653A1 |
| Устройство для обучения операторов систем управления электроприводом постоянного тока | 1987 |
|
SU1441443A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| "Устройство для моделирования системы "двигатель-насос" | 1991 |
|
SU1797095A1 |
| "Устройство для моделирования системы "двигатель-насос" | 1991 |
|
SU1833837A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ ДВИГАТЕЛЬ - НАСОС - ТРУБОПРОВОД | 1992 |
|
RU2065196C1 |
фиъ.1
