Изобретение относится к машиностроению, а именно к кривошипно-ша- тунным преобразователям движения, и найдет применение в любых отраслях промьгашенности, где требуется обеспечить возвратно-поступательное движение ведомого звена с одновременным перемещением траектории дви- жения по окружности с
Цель изобретения - расширение кинематических возможносте11 за счет регулирования амплитуды перемещения коромысла о
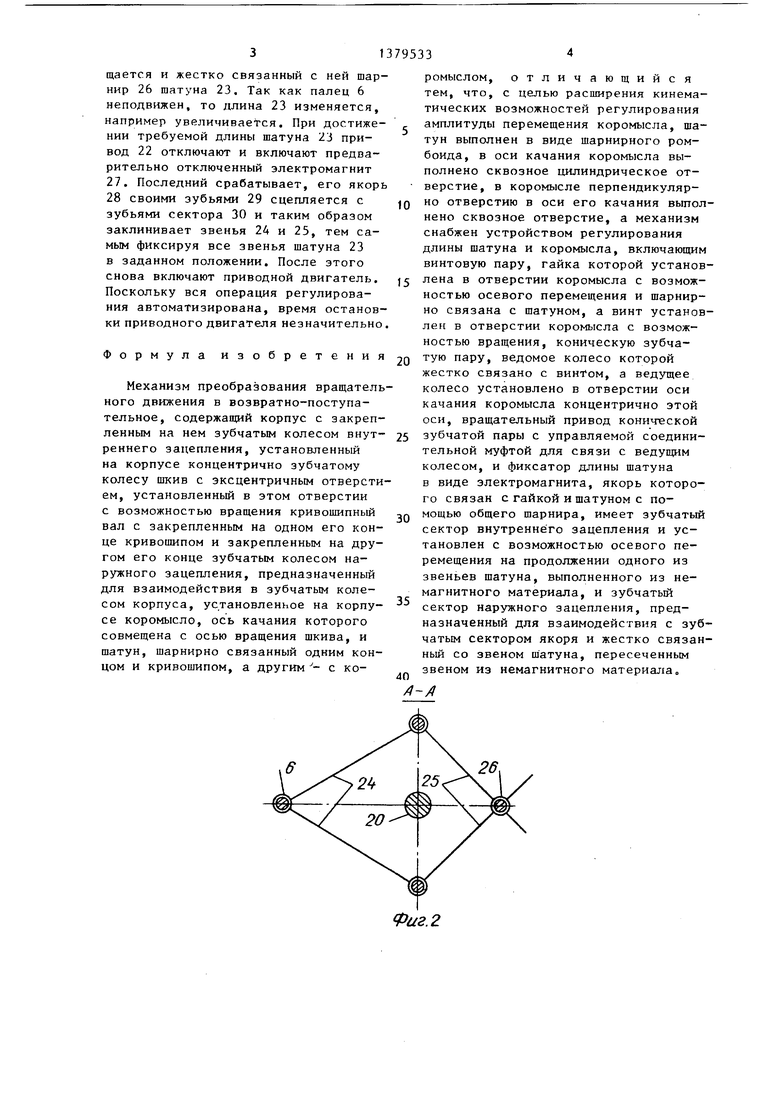
На фиго 1 показана конструктивная схема механизма; на фиг,, 2 - разрез А-А на фиг о 1; на фиг о 3 - конструкция фиксатора длины шатунаj на фиг. 4 - кинематическая схема механизма.
Механизм содержит корпус 1, установленный в нем на подшипниках 2 и 3 шкив 4 и кривошипный вал 5 с кривоФиксатор длины шатуна 23 состоит из злектромагнита 27, через шарнир
26также связанного с гайкой 18.
На якоре 28 электромагнита 27 выполнен зубчатый сектор 29 внутреннего зацепления, а сам якорь 28 установлен с возможностью осевого перемещения на продолжении одного из двух
Q пересекающихся звеньев 25 шатуна 23, причем это продолжение звена 25 выполнено из немагнитного материала. На продолжении звена 25 жестко закреплен зубчатый сектор 30 наружно| 5 го зацепления, взаимодействующий с зубчатым сектором 29 якоря 28. Обмотки 31 катушек электромагнита
27включены встречноо Подвижные контакты 32 цепи питания электромагни20 та 27 установлены на торце оси 12 коромысла 13 (фиг. 1).
Механизм работает следуюшим образом.
При вращении шкива 4 приводом (не
шипным пальцем 6, установленный в от- 25 показан) кривошипный вал 5 перемещается по окружности D (фиг, 4). Поскольку зубчатое колесо 8 взаимодействует с неподвижным зубчатьпи колесом 9, то кривошипный вал 5 вращается относительно оси О,-О,, а его палец 6 и соответствующий конец шатуна 23 перемещаются относительно оси О,-0 по окружности D,. Второй конец шатуна 23 перемещается возвратно-поступательно по траектории D, которая в свою очередь перемещается вдоль окружности ,
верстии шкива 4 на подшипниках 7. На другом конце кривошипного вала 5 закреплено зубчатое колесо 8, взаимодействующее с зубчатым колесом 9, концентричным шкиву 4 и жестко связанным с корпусом 1 . На поддиипниках 10 и 11 в корпусе 1 концентрично шкиву 4 и зубчатому колесу 9 установлена ось 12 коромысла 13, на конце которой закреплено ведомое звено 14. Внутри оси 12 выполнено сквозное цилиндрическое отверстие 15, а внутри коромысла 13 перпендикулярно отверстию 15 выполнено сквозное отверстие 6.
Устройство регулирования амплитуды перемещения коромысла 13 включает в себя винт 17, установленный в отверстии 16 коромысла 13 с возможностью вращения, и гайку 18, установленную в отверстии 16 с возможностью осевого перемещения. На винте 17 жестко закреплено ведомое колесо 19 конической зубчатой пары, ведущее колесо 20 которой установлено в от- - верстии 15 концентрично ему и через управляемую, например, электромагнитную муфту 21 связано с вращательным приводом 22. Шатун 23 вьтолнен в виде шарнирного ромбоида из звеньев 24 и 25 и одним концом шарнирно связан с пальцем 6 кривошипа 5, а другим концом через шарнир 26 связан с гайкой 18о
Фиксатор длины шатуна 23 состоит из злектромагнита 27, через шарнир
26также связанного с гайкой 18.
На якоре 28 электромагнита 27 выполнен зубчатый сектор 29 внутреннего зацепления, а сам якорь 28 установлен с возможностью осевого перемещения на продолжении одного из двух
Q пересекающихся звеньев 25 шатуна 23, причем это продолжение звена 25 выполнено из немагнитного материала. На продолжении звена 25 жестко закреплен зубчатый сектор 30 наружно5 го зацепления, взаимодействующий с зубчатым сектором 29 якоря 28. Обмотки 31 катушек электромагнита
27включены встречноо Подвижные контакты 32 цепи питания электромагни0 та 27 установлены на торце оси 12 коромысла 13 (фиг. 1).
Механизм работает следуюшим образом.
При вращении шкива 4 приводом (не
25 показан) кривошипный вал 5 перемеща30
5
0
5
0
5
ется по окружности D (фиг, 4). Поскольку зубчатое колесо 8 взаимодействует с неподвижным зубчатьпи колесом 9, то кривошипный вал 5 вращается относительно оси О,-О,, а его палец 6 и соответствующий конец шатуна 23 перемещаются относительно оси О,-0 по окружности D,. Второй конец шатуна 23 перемещается возвратно-поступательно по траектории D, которая в свою очередь перемещается вдоль окружности ,
Коромысло 13 совершает качатель- ное движение по траектории D вокруг оси 01-07. Величина колебаний зависит от длин кривошипного вала 5, шатуна 23 и коромысла 13, а частота - от передаточного отношения шестерни 8 и неподвижного зубчатого колеса 9. Вместе с коромыслом 13 совершает ка- чательное движение по перемещающейся траектории ведомое звено 14.
Регулирование величины хода коромысла осуществляют при остановленном приводном двигателе следующим образом. Отключают электромагнит 27 и с помощью муфты 21 соединяют ведущее колесо 20 с приводом 22. При включении привода 22 вращение передается через коническую зубчатую пару 19 и 20 винту 17. При этом вращательное движение винта 17 преобразуется в осевое поступательное перемещение гайки 18. Вместе с гайкой 18 перемещается и жестко связанный с ней шарнир 26 шатуна 23. Так как палец 6 неподвижен, то длина 23 изменяется, например увеличивается. При достижении требуемой длины шатуна 23 привод 22 отключают и включают предварительно отключенный электромагнит 27. Последний срабатывает, его якорь 28 своими зубьями 29 сцепляется с зубьями сектора 30 и таким образом заклинивает звенья 24 и 25, тем самым фиксируя все звенья шатуна 23 в заданном положении. После этого снова включают приводной двигатель. Поскольку вся операция регулирования автоматизирована, время остановки приводного двигателя незначительно
Формула изобретения
Механизм преобразования вращательного движения в возвратно-поступательное, содержащий корпус с закрепленным на нем зубчатым колесом внутреннего зацепления, установленный на корпусе концентрично зубчатому колесу шкив с эксцентричным отверстием, установленный в этом отверстии с возможностью вращения кривошипный вал с закрепленным на одном его конце кривошипом и закрепленным на другом его конце зубчатым колесом наружного зацепления, предназначенный для взаимодействия в зубчатым колесом корпуса, установленное на корпусе коромысло, ось качания которого совмещена с осью вращения шкива, и шатун, шарнирно связанный одним концом и кривошипом, а другим - с ко
5
0
ромыслом, отличающийся тем, что, с целью расширения кинематических возможностей регулирования амплитуды перемещения коромысла, ща- тун выполнен в виде шарнирного ромбоида, в оси качания коромысла выполнено сквозное цилиндрическое отверстие, в коромысле перпендикулярно отверстию в оси его качания выполнено сквозное отверстие, а механизм снабжен устройством регулирования длины шатуна и коромысла, включающим винтовую пару, гайка которой установлена в отверстии коромысла с возможностью осевого перемещения и шарнир- но связана с шатуном, а винт установлен в отверстии коромысла с возможностью вращения, коническую зубчатую пару, ведомое колесо которой жестко связано с вин-Гом, а ведущее колесо установлено в отверстии оси качания коромысла концентрично этой оси, вращательный привод коничтеской зубчатой пары с управляемой соединительной муфтой для связи с ведущим колесом, и фиксатор длины шатуна в виде электромагнита, якорь которого связан с гайкой и шатуном с по- Q мощью общего шарнира, имеет зубчатый сектор внутреннего зацепления и установлен с возможностью осевого перемещения на продолжении одного из звеньев щатуна, выполненного из немагнитного материала, и зубчатый сектор наружного зацепления, предназначенный для взаимодействия с зубчатым сектором якоря и жестко связанный со звеном шатуна, пересеченным звеном из немагнитного материала.
5
5

Изобретение относится к криво- шипно-шатунным преобразователям движения с регулируемой амплитудой перемещения ведомого звена. Цель изобретения - расширение кинематических возможностей за,счет регулирования амплитуды перемещения коромысла. При вращении шкива 4 кривошипный вал 5 вращается вместе с ним и время за счет взаимодействия зубчатых колес 8 и 9 вокруг собственной оси. В результате кривошипный палец 6 через шатун 23 и шарнир 26 сообщает коромыслу 13 возвратно-поворотное движение с некоторой амплитудой, которая смещается по окружности вокруг оси по мере поворота шкива 4. Для регулировки длин шатуна 23 и коромысла 13 механизм останавливают и от привода 22 через управляемую соединительную муфту 21 и конические зубчатые колеса 20,19 сообщают вращение винту 17. Гайка 18 и закрепленный на ней шарнир 26 перемещаются, изменяя длину шатуна 23 и коромысла 13. По окончании регулировки отключают привод 22 и специальным электромагнитным устройством фиксируют новую длину шатуна 23. 4 ил. (Л со со ел оо со ел/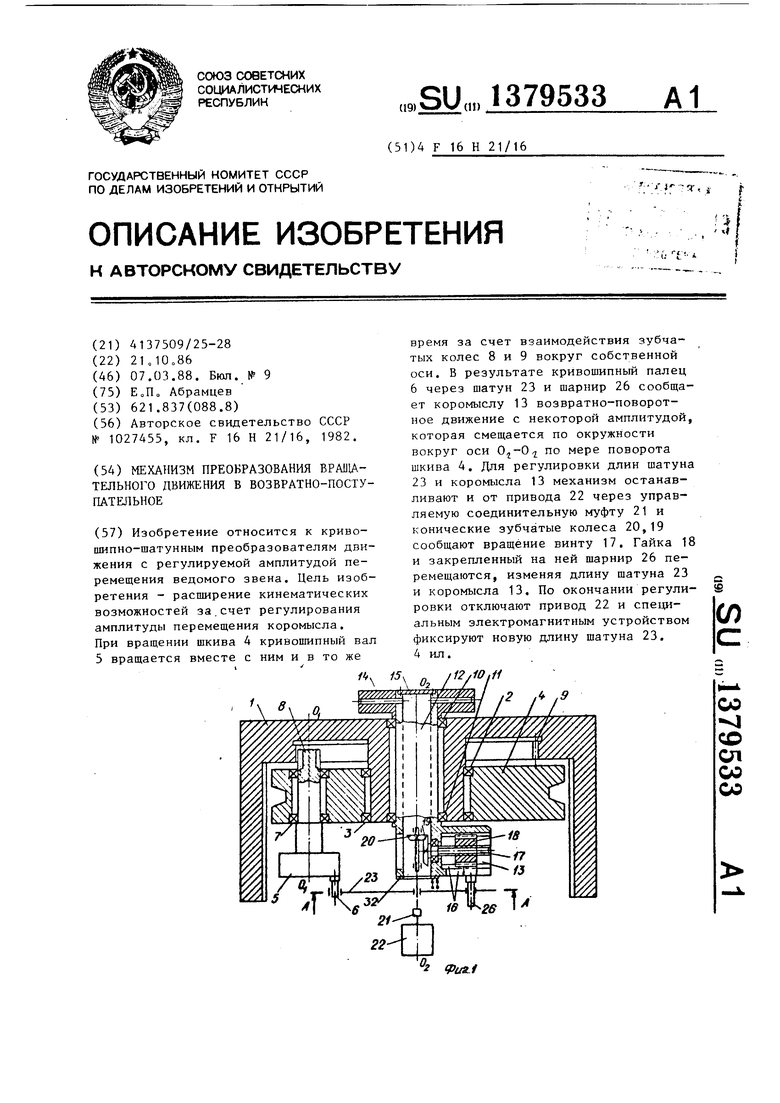
Фиг. 2
27
| Механизм преобразования вращательного движения в возвратно-поступательное | 1982 |
|
SU1027455A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
