Устройство относится к области радионавигации и может быть использовано в бортовой аппаратуре спутниковых навигационных систем второго поколения.
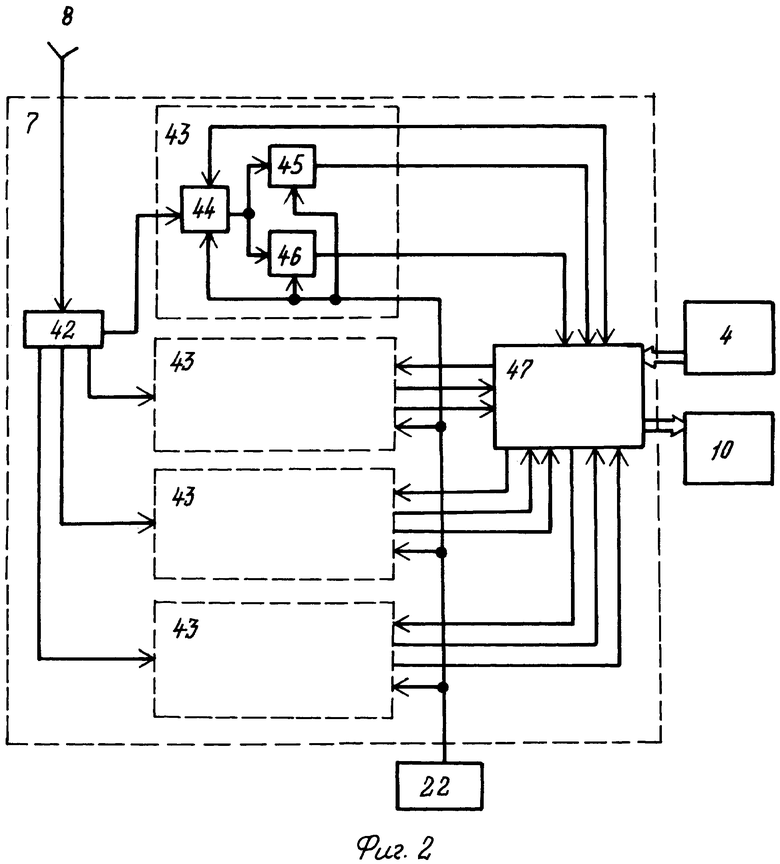
Известна самолетная аппаратура потребителей (АП) американской спутниковой радионавигационной системы (PHC) "Навстар" [3], состоящая (см. фиг.2) из пульта ввода информации 4, слабонаправленной антенны 8, ориентированной в верхнюю полусферу приемоиндикатора (ПИ) 7, индикатора текущих координат 10 и эталона частоты и времени 22.
ПИ 7, в свою очередь, состоит из приемника 42, четырех каналов обработки сигналов 43, каждый из которых содержит блок поиска и слежения за сигналом 44, демодулятор эфемеридной и служебной информации 45, измеритель разности времени 46, а также бортовой электронно-вычислительной машины (БЭВМ) 47.
Структура взаимного расположения навигационных искусственных спутников Земли (НИСЗ) системы "Навстар" такова, что в зоне видимости с борта летательного аппарата (ЛА) одновременно находится от 5 до 10 НИСЗ. Каждый НИСЗ передает навигационную информацию, включающую вектор положения, составляющие скорости и пр. Излучения всех НИСЗ строго синхронизированы.
Антенна 8 и приемник 42 принимают сигналы всех НИСЗ, находящихся в зоне видимости. БЭВМ 47 на основании априорных данных определяет наиболее информативные из них для проведения навигационных определений и выдает соответствующие сигналы в каналы обработки 43 для поиска и слежения за требуемыми сигналами с помощью блоков поиска и слежения за сигналами 44, затем производится с помощью измерителя разности времени 46 определение момента прихода сигнала относительно бортовой шкалы времени (БШВ), формируемой эталоном частоты и времени 22. Демодулятор эфемеридной и служебной информации 45 расшифровывает данные о моменте излучения сигнала, положении НИСЗ в этот момент и его векторе скорости. Полученные данные поступают в БЭВМ 47 для вычисления координат летательного аппарата (ЛА). Полученные значения координат места летательного аппарата (ЛА) фиксируются (высвечиваются) на индикаторе текущих координат 10.
Прием одновременно сигналов НИСЗ позволяет определить широту, долготу и высоту ЛА относительно центра масс Земли, а также поправку к БШВ. Существенным недостатком данной аппаратуры является неудовлетворительная точность местоопределения ЛА, обусловленная погрешностью привязки картографического уровня к центру масс Земли для территории нашей страны, которая составляет около ста метров.
Таким образом, точность местоопределения, обеспечиваемая с помощью описываемой аппаратуры, недостаточна при заходе на посадку над местностью, не привязанной с должной точностью к центру масс Земли, так же как и для полета по непривязанным трассам.
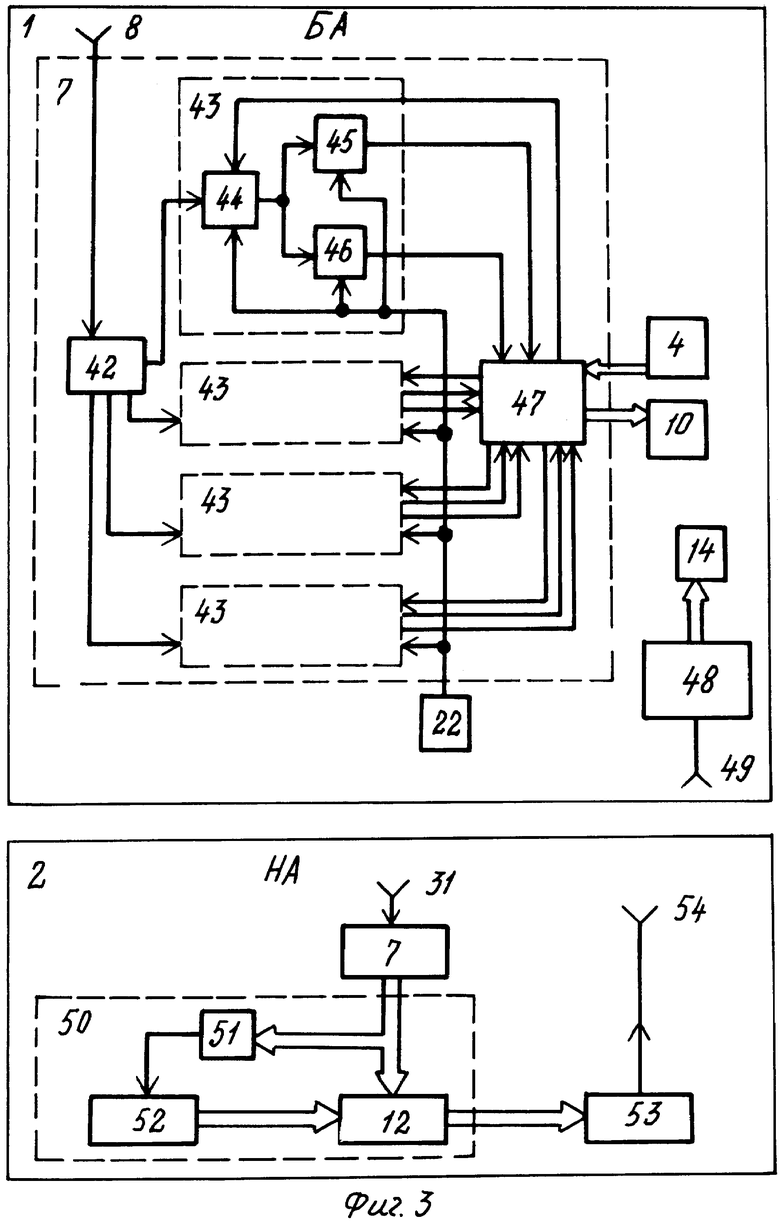
Известна аппаратура американской радионавигационной системы "Навстар", основанная на дифференциальном методе навигационных определений [1] (см. фиг.3). Она включает в себя бортовую аппаратуру 1 и наземную аппаратуру контрольной станций (КС) 2. Бортовая аппаратура состоит из пульта ввода информации 4, слабонаправленной антенны 8, ориентированной в верхнюю полусферу, ПИ 7 (из фиг.2), индикатора текущих координат 10 и эталона частоты и времени 22, а также из последовательно соединенных слабонаправленной антенны 49, ориентированной в нижнюю полусферу, радиоприемника 48 и индикатора дифференциальных поправок 14.
На наземной КС устанавливается аппаратура определения дифференциальных поправок, состоящая из последовательно соединенных ПИ 7, аналогичного ПИ, устанавливаемому на борту ЛА, с антенной 31, блока определения диффренциальных поправок 50, представляющего собой вычитатель 12 и элемент или 51, входы которых являются входом блока определения дифференциальных поправок 50, при этом ко второму входу вычитателя 12 подсоединен блок памяти 52, вход которого соединен с выходом элемента или 51, а выход вычитателя 12, являющийся выходом блока определения дифференциальных поправок, соединен со входом передатчика 53, соединенного с антенной 54.
Это устройство работает следующим образом: бортовая ПИ 7 с антенной 8 принимает сигналы НИСЗ и решает навигационную задачу (НЗ) определения своего местоположения. Вычисленные значения координат места ЛА фиксируются индикатором текущих координат. На КС 2 осуществляется прием сигналов тех же НИСЗ с помощью ПИ 7, которая решает НЗ и определяет координаты КС, которые выдаются в вычитатель 12, на другой вход вычитателя 12 выдаются значения точных координат КС, которые известны с большой точностью (около 1-2 м), хранятся в блоке памяти 52 и выдаются в вычитатель 12 при наличии управляющего сигнала на выходе элемента ИЛИ 51. В вычитателе 12 определяется разность между измеренными и точными значениями координат КС, которая в виде дифференциальной поправки выдается на передатчик поправок 53. Сигнал, содержащий дифференциальную поправку, принимается радиоприемником 48 через антенну 49; выделенные дифференциальные поправки поступают на индикатор поправок 14.
Полученные дифференциальные поправки используются оператором для корректировки местоположения ЛА, определяемого с помощью бортовой ПИ.
Описанное устройство обладает следующими недостатками:
1) недостаточная точность определения местоположения, обусловленная значительной систематической погрешностью (около 2 м), вносимой в измеряемые координаты не идентичностью измерительных трактов на борту ЛА и на наземной КС, так как аппаратурная погрешность каждого отдельного измерительного тракта может составлять 1,5 м [1];
2) вероятная возможность несанкционированного использования высокоточной информации и данных о точности геодезической привязки наземных пунктов на территории страны по сигналам, излучаемым КС и содержащим дифференциальные поправки.
Известно устройство для определения местоположения, основанное на дифференциальном методе навигационных определений с вычислением дифференциальных поправок бортовой аппаратурой, принятое за прототип (см. фиг.4). Данное устройство для определения местоположения состоит из бортовой аппаратуры (БА) 1 и наземной аппаратуры (НА) 2, установленной на КС. БА-1 включает входящие в состав навигационной аппаратуры потребителя (НАП) пульт ввода информации (ПВИ)-4, приемоиндикатор (ПИ)-7 и эталон частоты и времени (ЭЧВ)-22, при этом ПВИ-4 подключен к информационному входу ПИ-7, а ЭЧВ-22 подключается к эталонному входу ПИ-7, а также приемную антенну 8, ориентированную в верхнюю полусферу, подключенную к первому сигнальному входу антенного переключателя 62, выход которого подключен к сигнальному входу ПИ 7, переключатель 9, вход которого соединен с информационным выходом ПИ 7, первый информационный выход переключателя 9 соединен с индикатором текущих координат 10, а второй информационный выход соединен с первым информационным входом вычитателя 12, выход которого соединен с информационным входом первого блока памяти 13, выход которого соединен с индикатором дифференциальных поправок 14, а также дешифратор 15, вход которого также подсоединен к информационному выходу ПИ 7, а выходы соединены со входами элемента ИЛИ 16, выход которого соединен со входом синхронизатора 17, при этом вход синхронизатора 17 является входом дифференцирующей цепи 56, выход которой подключен к первому входу элемента ИЛИ 57, выход которого подсоединен ко входу генератора импульсов заданной длительности 58, выход которого является выходом синхронизатора 17, кроме того, выход генератора 58 соединен через элемент задержки 59 с входом элемента И 60, второй вход которого соединен с входом дифференцирующей цепи 56, кроме того, в состав синхронизатора 17 входит вторая дифференцирующая цепь 61, подсоединенная к выходу элемента И 60, при этом ее выход соединен со вторым входом элемента ИЛИ 57. Кроме того, БА 1 включает второй блок памяти 18, дифференцирующую цепь 25, приемную антенну 55, ориентированную в нижнюю полусферу и элемент задержки 30.
Выход синхронизатора 17 соединен с управляющими входами переключателей 62 и 9 и через дифференцирующую цепь 25 со входом обнуления блока памяти 13, а через элемент задержки 30 - со входами синхронизации вычитателя 12 и блоков памяти 13 и 18, адресные входы последнего соединены с выходами дешифратора 15, выход - со вторым информационным входом вычитателя 12, а выход антенны 55 соединен со вторым сигнальным входом переключателя 62. НА 2 представляет собой ретранслятор сигналов НИСЗ и состоит из слабонаправленной приемной антенны 31, ориентированной в верхнюю полусферу, подключенной к входу приемника 63, выход которого через блок задержки 64 соединен со входом усилителя сигналов 40, и передающей антенны 65, ориентированной в верхнюю полусферу. ПИ 7 (по фиг.2), в свою очередь, состоит из приемника 42, сигнальный вход которого является сигнальным входом ПИ 7, а сигнальные выходы подключены к сигнальным входам каналов обработки 43, являющимися сигнальными входами блоков поиска и слежения за сигналами 44, выход каждого из которых подсоединен ко входам демодулятора эфемеридной и служебной информации 45 и измерителя разности времени 46, вход эталонного сигнала блока поиска и слежения 44 соединен с эталонным входом ПИ 7, управляющий вход - с выходом БЭВМ 47. Вторые входы демодулятора 45 и измерителя разности времени 46 также соединены с эталонным входом ПИ 7, информационные выходы демодулятора 45 и измерителя 46 подсоединены к соответствующим входам БЭВМ 47. Информационный выход БЭВМ 47 является информационным выходом ПИ 7, а ее информационный вход является информационным входом ПИ 7. Устройство для определения местоположения функционирует следующим образом. Перед началом сеанса навигационных определений с пульта ввода информации (ПВИ) 4 на БЭВМ 47, входящую в состав ПИ 7 (см. фиг.2), вводятся исходные данные; излучаемые НИСЗ сигналы принимаются на борту ЛА приемной антенной 8, которая через нормально замкнутые контакты переключателя 62 подсоединена к сигнальному входу ПИ 7, при этом сигналы всех НИСЗ, находящихся в зоне видимости ЛА, поступают на вход приемника 42; БЭВМ 47 на основании априорных данных, полученных с ПВИ 4, определяет оптимальное созвездие из четырех НИСЗ для проведения навигационных определений и дает сигнал в каналы обработки 43 для поиска и слежения за требуемыми сигналами с помощью блоков поиска и слежения за сигналом 44, затем производился с помощью измерителя разности времени 46 определение момента прихода сигнала относительно бортовой шкалы времени, формируемой эталоном частоты и времени 22.
Демодулятор эфемеридной и служебной информации 45 расшифровывает данные о моменте излучения сигнала и положении НИСЗ в этот момент.
Полученные данные поступают 6 БЭВМ 47 для вычисления координат места ЛА. Вычисленные значения координат ЛА выдаются с выхода БЭВМ 47 на входы индикатора текущих координат 10 (через нормально замкнутые контакты переключателя 9) и дешифратора 15. В дешифраторе 15 по полученным значениям координат ЛА определяется номер той КС, которая находится в зоне радиовидимости ЛА. Точные значения координат всех функционирующих КС хранятся в блоке памяти 18. После определения номера КС на соответствующем выходе дешифратора 15 появляется сигнал, который поступает на соответствующую ячейку блока памяти 18, в которой хранятся точные значения координат данной КС.
Одновременно сигнал с выхода дешифратора 15 подается через элемент ИЛИ 16 на вход синхронизатора 17, при этом по переднему фронту сигнала дифференцирующей цепью 56 формируется импульс, который через элемент ИЛИ 57 поступает на генератор импульсов заданной длительности 58. При подаче импульса на вход генератора 58 он формирует тактовый импульс, длительность которого равна времени определения дифференциальной поправки на борту ЛА. Тактовый импульс с выхода генератора 58 через элемент задержки 59, элемент И 60 (при наличии на другом его входе сигнала с выхода элемента ИЛИ 16) и дифференцирующую цепь 61 подается на второй вход элемента ИЛИ 57 и снова запускает генератор 58. Таким образом, на выходе генератора 58, который является выходом синхронизатора 17, формируется последовательность импульсов, длительность которых определяет время вычисления дифференциальных поправок, а интервал времени между импульсами (задаваемый временем задержки элемента задержки 59) определят время работы ПИ 7 в штатном режиме.
Последовательность импульсов с выхода синхронизатора 17 по управляющим цепям подается на входы переключателей 62 и 9, через дифференцирующую цепь 25 - на вход обнуления блока памяти 13, а через элемент задержки 30 - на входы синхронизации вычитателя 12 и блоков памяти 13 и 18.
При этом происходит переключение контактов переключателей 62 и 9 на время действия импульса, в результате чего антенна 8 отключается от входа ПИ 7, а антенна 55 подключается ко входу ПИ 7, информационный выход ПИ 7 переключается на вход вычитателя 12, а сформированный дифференцирующей цепью 25 импульс обнуляет содержимое блока памяти 13. Кроме того, по импульсу с выхода синхронизатора 17, сдвинутому элементом задержки 30 на время, необходимое для обработки сигналов в ПИ 7, осуществляется выдача точных координат КС, хранящихся в блоке памяти 18, в вычитатель 12, который включается этим же задержанным сигналом. Одновременно с приемом сигналов НИСЗ на борту ЛА осуществляется прием сигналов НИСЗ на антенну 31 контрольной станции, выход которой соединен со входом наземного приемника 63, с выхода которого сигналы поступают на вход элемента задержки 64, который осуществляет задержку сигналов на время, равное времени обработки сигнала в бортовом ПИ 7. Задержанные таким образом сигналы с выхода элемента задержки 64 поступают на вход усилителя сигналов 40, где усиливаются и поступают затем в антенну 65.
Сигналы, излучаемые КС, принимаются антенной 55, через переключатель 62 поступают в ПИ 7, где по результатам измерений принятых сигналов решается навигационная задача определения координат КС. Результаты вычислений с выхода ПИ 7 выдаются на первый вход вычитателя 12, где сравниваются с точными значениями координат КС, которые поступают с блока памяти 18, результат сравнения в виде дифференциальной поправки выдается на первый вход блока памяти 13, а с выхода блока памяти 13 поступает на индикатор диффренциальных поправок 14. По окончании действия тактового импульса синхронизатора 17 переключатели 62 и 9 возвращаются в исходное положение, при этом антенна 55 отключается, а антенна 8 подключается ко входу ПИ 7, переключается информационный выход ПИ 7 с вычитателя 12 на индикатор текущих координат 10 с задержкой, определяемой элементом задержки 30, отключается вычитатель 8 и блоки памяти 18 и 13. С этого момента бортовой ПИ 7 снова принимает сигналы НИСЗ и решает навигационную задачу определения своих координат (то есть работает в штатном режиме); текущие значения координат ЛА высвечиваются на индикаторе текущих координат 10.
Периодичность переключения из штатной работы в режим определения дифференциальной поправки определяется временем, в течение которого значение этой поправки остается справедливым.
При срабатывании реле времени, которое является элементом задержи 59 в схеме синхронизатора 17 и определяет время работы ПИ 7 в штатном режиме, осуществляется запуск генератора 58, на выходе последнего формируется следующий импульс, по которому снова повторяется весь цикл работы описываемого устройства. Работа устройства в режиме с периодическим определением дифференциальных поправок будет осуществляться в течение времени нахождения КС в зоне видимости ЛА (размеры этой зоны определяют точность координат рабочей зоны, заложенных в дешифраторе 15). При выходе из этой зоны бортовой ПИ 7 работает только в штатном режиме, так как сигнал на выходе дешифратора 15 отсутствует и, следовательно, не работает генератор синхронизатора 17. При вхождении ЛА в зону видимости следующей КС весь цикл работы устройства с периодическим определением дифференциальных поправок повторяется. Полученные дифференциальные поправки используются оператором для корректировки местоположения ЛА, определяемого с помощью бортового ПИ.
Описанное устройство по сравнению с известным устройством системы "Навстар" позволяет повысить точность навигационных определений за счет исключения погрешности радионавигационных измерений, обусловленной неидентичностью измерительных трактов, а так же исключить возможность несанкционированного доступа к высокоточной навигационной информации за счет использования на КС ретранслятора сигналов НИСЗ, которые не могут быть использованы для получения информации о геодезической привязке наземных пунктов на территории страны.
Однако описанное выше устройство обладает следующими недостатками:
1) рабочая зона устройства ограничена зоной прямой видимости контрольной станции с борта ЛА, что составляет район с радиусом около 200 км при высоте ЛА Н ≤2000 м;
2) для обеспечения высокоточных навигационных определений в любой точке территории страны требуется развертывание большого количества КС, оснащенных ретрансляторами (˜1000 шт.).
Целью предлагаемого изобретения является расширение рабочей зоны устройства для определения местоположения.
Сущность заявляемого устройства заключается в том, что в известное устройство для определения местоположения, в состав которого входят антенна, ориентированная в верхнюю полусферу, последовательно соединенные приемоиндикатор, переключатель, вычитатель, первый блок памяти и индикатор дифференциальных поправок, последовательно соединенные дешифратор, элемент ИЛИ и синхронизатор, а также пульт ввода информации, второй блок памяти, индикатор текущих координат, эталон частоты и времени, элемент задержки и дифференцирующая цепь, при этом выход приемоиндикатора соединен с информационным входом дешифратора, выход дешифратора соединен с адресным входом второго блока памяти, выход последнего подключен ко второму информационному входу вычитателя, выход синхронизатора через дифференцирующую цепь соединен со входом обнуления первого блока памяти, а индикатор текущих координат подключен ко второму выходу переключателя, а также наземная аппаратура контрольной станции, введен спутниковый ретранслятор, а в бортовую аппаратуру дополнительно введены последовательно соединенные третий блок памяти, элемент И, второй элемент ИЛИ, второй переключатель, а также последовательно соединенные вычислитель, фазовращатель и третий переключатель, а также вторая дифференцирующая цепь, четвертый блок памяти, второй и третий элементы задержки, при этом антенна подключена к сигнальному входу приемоиндикатора, информационный вход которого соединен с выходом второго переключателя, а эталонный вход приемоиндикатора подключен к выходу третьего переключателя, ко второму эталонному входу которого подключен выход эталона частоты и времени, соединенный со входом эталонной частоты фазовращателя, пульт ввода информации подключен ко второму входу второго элемента ИЛИ, ко второму информационному входу второго переключателя подсоединен выход второго блока памяти, к которому подключен также первый информационный вход вычислителя, второй информационный вход последнего соединен с выходом третьего блока памяти, информационный вход которого соединен со вторым выходом первого переключателя, а третий информационный вход вычислителя соединен с выходом четвертого блока памяти, выход синхронизатора соединен с управлявшими входами второго, третьего и четвертого блоков памяти, через второй элемент задержки выход синхронизатора соединен с управляющим входом вычислителя, через третий элемент задержки с управляющими входами первого, второго и третьего переключателей и вычитателя, в через вторую диффренциальную цепь с управляющими входами элемента И и первого блока памяти, а через первый элемент задержки выход второй дифференцирующей цепи соединен с входом обнуления третьего блока памяти; наземная аппаратура контрольной станции выполнена в виде последовательно соединенных приемной антенны, первого преобразователя частоты, усилителя промежуточной частоты, второго преобразователя частоты, усилителя мощности и передающей антенны, а спутниковый ретранслятор выполнен в виде последовательно соединенных приемной антенны, первого преобразователя частоты, усилителя промежуточной частоты, второго преобразователя частоты, усилителя мощности и передающей антенны.
Отличительные от прототипа признаки обусловливают соответствие технического решения критерию "новизна". В известных в науке и технике решениях данная совокупность отличительных признаков не обнаружена, что позволяет считать заявляемое устройство соответствующим критерию "существенные отличия".
Сущность предлагаемого технического решения поясняется следующими чертежами:
на фиг.1 приведена структурная схема предлагаемого устройства для определения местоположения,
на фиг.2 - структурная схема аналога предлагаемого устройства,
на фиг.3 - структурная схема второго аналога предлагаемого устройства,
на фиг.4 - структурная схема прототипа предлагаемого устройства - устройства для определения местоположения с определением дифференциальной поправки на борту подвижного объекта,
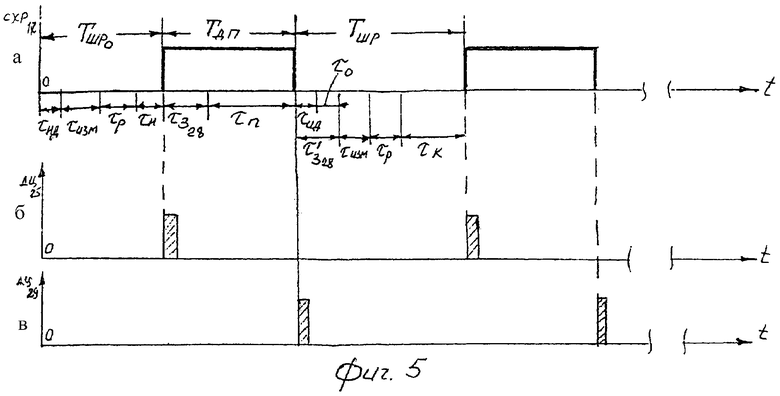
на фиг.5 - временная диаграмма работы бортовой аппаратуры,
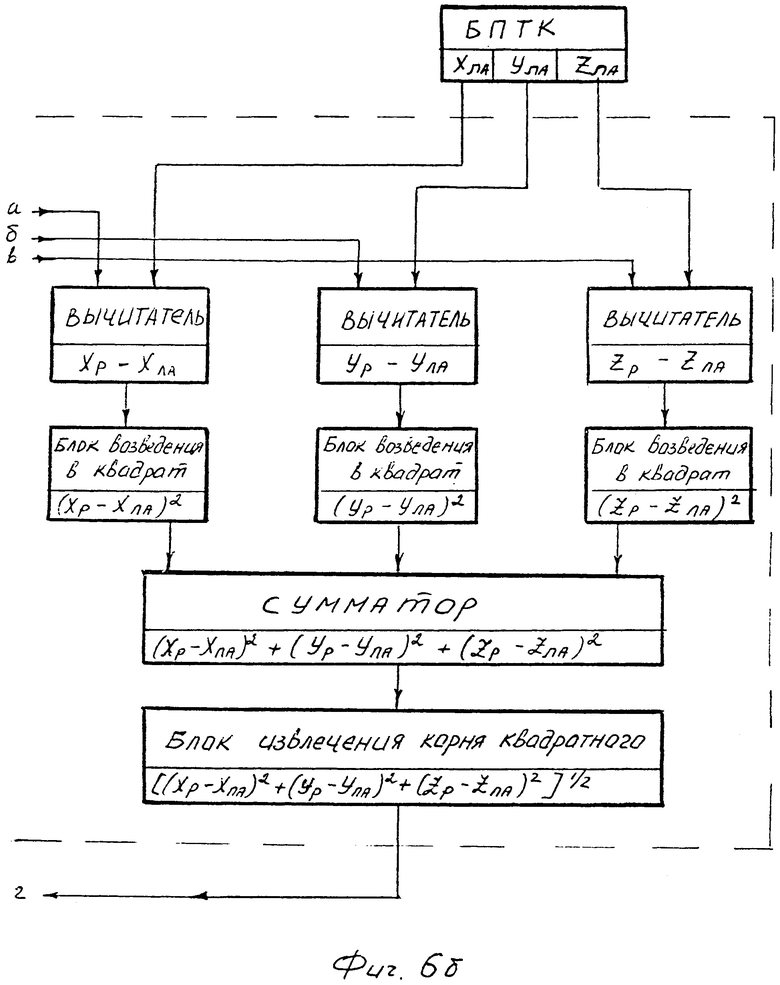
на фиг.6 - структура алгоритма.
Предлагаемое устройство для определения местоположения по фиг.1 состоит из бортовой аппаратуры (БА) 1, наземной аппаратуры контрольной станции (НА) 2 и спутникового ретранслятора (СР) 3, установленного на стационарном ИСЗ.
БА 1 состоит из пульта ввода информации (ПВИ) 4, подключенного к одному из входов элемента ИЛИ 5, выход которого соединен с первым информационным входом переключателя (ПК) 6, выход которого подключен к информационному входу приемоиндикатора (ПИ) 7, к сигнальному входу которого подключена слабонаправленная приемная антенна 8, ориентированная в верхнюю полусферу, а информационный выход ПИ 7 подключен к информационному входу переключателя (ПК) 9. БА 1 содержит также индикатор текущих координат (ИТК) 10, блок памяти 11 (блок памяти текущих координат - БПТК), вычислитель (В) 12. Первый информационный выход ПК 9 соединен с первым информационным входом В 12, второй выход - с входами блоков 10 и 11. Информационный вход В 12 подключен ко входу блока памяти 13 (блока памяти дифференциальных поправок - БПДП). Информационный выход БПДП 13 соединен с входом индикатора дифференциальных поправок (ИДП) 14. К информационному выходу ПИ 7 также подключен вход дешифратора (ДШ) 15, выходы которого соединены со входами элемента ИЛИ 16, выход которого соединен со входом синхронизатора (СХР) 17. Выходы ДШ 15 соединены также с адресными входами блока памяти 18 (блока памяти координат КС - БПКС), информационный выход которого соединен со вторым информационным входом переключателя ПК 6, вторым информационным входом В 12 и первым информационным входом вычислителя (ВЛ) 19, при этом ко второму информационному входу последнего (ВЛ 19), объединенному с информационным входом элемента И 20, подключен информационный выход БПТК 11. Кроме этого в состав БА 1 входит устройство формирования бортовой шкалы времени (БШВ) 21, состоящее из эталона частоты времени (ЭЧВ) 22, переключателя (ПК) 23 и фазовращателя (ФВ) 24. Выход ФВ 24 соединен с первым эталонным входом ПК 23. Выход ЭВЧ 22 соединен со входом эталонной частоты ФВ 24 и со вторым эталонным входом ПК 23, сигнальный выход которого, являющийся выходом БШВ 21, подключен к эталонному входу ПИ 7, а вход ФВ 24 соединен с выходом вычислителя ВЛ 19. Выход (выход тактовой частоты) синхронизатора 17 соединен с управляющим входом БПТК 11 и через дифференцирующую цепь (ДЦ) 25 со входом обнуления БПДП 13. Выход блока 17 соединен также с управляющим входом БПКС 18 и управляющим входом блока памяти 26 (блок памяти координат стационарного ИСЗ - БПС), информационный выход которого соединен с третьим информационным входом ВЛ 19, при этом управляющий вход ВЛ 19 через элемент задержки (ЭЗ) 27 также соединен с выходом СХР 17. Кроме этого выход СХР 17 через элемент задержки (ЭЗ) 28 соединен с управляющими входами ПК 6, 9 и 23, а также В 12, и наконец, выход СХР 17 через ДЦ 29 подключен к управляющим входам элемента И 20 и блока памяти БПДП 13, а через ДЦ 29 и через элемент задержки (ЭЗ) 30 - ко входу обнуления БПТК 11. Выход элемента И 20 соединен со входом элемента ИЛИ 5.
Наземная аппаратура контрольной станции (НА) 2, предназначенная для ретрансляции сигналов НИСЗ, содержит последовательно соединенные слабонаправленную приемную антенну 31, ориентированную в верхнюю полусферу, подключенную ко входу первого преобразователя частоты (1ПЧ) 32, выход которого подключен ко входу усилителя ПЧ (УПЧ) 33, выход которого соединен со входом второго преобразователя частоты (2ПЧ) 34, выход которого соединен со входом усилителя мощности (УМ) 35, к которому подсоединена направленная передающая антенна 36. Спутниковый ретранслятор (СР) 3, устанавливаемый на ИСЗ и предназначенный для ретрансляции сигналов, излученных наземной аппаратурой КС 2, содержит последовательно соединенные слабонаправленную антенну 37, ориентированную в нижнюю полусферу, подключенную к первому преобразователю частоты (1ПЧ) 38, выход которого подключен ко входу усилителя УПЧ 33, выход которого соединен со входом второго преобразователя частоты (2ПЧ) 39, выход которого соединен со входом усилителя мощности 40, к выходу которого подключена передающая слабонаправленная антенна 41 ориентированная в нижнюю полусферу.
ПВИ-4 и индикаторы текущих координат 10 и дифференциальных поправок 14 могут быть реализованы в виде унифицированных блоков БУИ-2, см. [2] стр.80, 81;
элемент ИЛИ 5 может быть выполнен в виде набора элементов ИЛИ, при этом одноименные разряды входных информационных (16-разрядных) шин подключаются ко входам одного элемента ИЛИ, а выходы набора элементов ИЛИ объединены в выходную информационную (16-разрядную) шину;
переключатели 6 и 9 могут быть выполнены в виде многоконтактного реле на два положения;
блоки памяти 11 и 13 могут быть реализованы на микросхемах ОЗУ, как это описано в [5], стр.173-176;
вычитатель 12 может быть выполнен в виде арифметического устройства параллельного действия с управляющим входом, описанного в [6], стр.361-367;
дешифратор 15 может быть реализован, например, в виде совокупности рямоугольного дешифратора, выполненного по схеме, описанной в [6] на стр.312, и элементов ИЛИ.
При этом вход дешифратора 15 соединен с шинами, несущими двоичный код текущей широты и долготы ЛА. Число разрядов, подаваемых на вход ДШ 15, выбирается в соответствии с точностью определения границы рабочей зоны КС (около 200 км), что в 104 раз меньше, чем точность определений координат ЛА. Поэтому число разрядов двоичного числа, поступающих на вход ДШ 15, существенно меньше, чем число разрядов, необходимых для определения координат ЛА. Коды двоичных чисел (широта и долгота) преобразуются в управляющий сигнал только на одном выходе с помощью прямоугольного дешифратора. Входы прямоугольного дешифратора, соответствующие координатам, лежащим в рабочей зоне каждой КС, объединяются с помощью элементов ИЛИ, выходы которых являются выходами ДШ 15;
синхронизатор 17 выполняется, как это описано в прототипе;
блок памяти 18 может быть выполнен, например, в виде ферритовых ЗУ с управлением, описанных в [6], стр.345-354;
вычислитель 19 представляет собой стандартный вычислитель, описанный в [13];
структурная схема алгоритма вычисления приведена на фиг.6, алгоритмы операций, входящих в структурную схему, описаны в [8] на стр.157-166;
элемент И 20 может быть реализован в виде набора элементов И, при этом один из входов всех элементов И является общим (управляющим), ко вторым входам подключается по одному разряду 16-разрядной входной (информационной) шины, а выходы элементов И объединены в выходную информационную шину;
эталон частоты и времени 22 может быть выполнен, например, как описано в [9];
переключатель 23 может быть выполнен в виде обычного реле на 2 положения;
фазовращатель 24 может быть выполнен, как описано в [8] на стр.109-113;
блок памяти 26 может быть реализован, например, в виде РПЗУ, описанного в [8], на стр.166-171;
элементы задержки 27, 28, 30 могут быть реализованы в виде искусственной линии задержки, как описано в [6], стр.551-555;
ретранслятор контрольной станции, состоящий из преобразователей частоты 32 и 34, усилителя промежуточной частоты 33 и усилителя мощности 35, может быть реализован, например, по схеме, приведенной на рис.9а в [10] стр.159;
направленная передающая антенна 36 может быть реализована, например, в виде зеркальной антенны с иглообразной формой диаграммы направленности, описанной в [12], стр.100-118;
спутниковый ретранслятор (СР) 3, состоящий из приемной антенны 37, преобразователей частоты 33 и 39, усилителя ПЧ 33, усилителя мощности 40 и передающей антенны 41, может быть выполнен по вышеупомянутой схеме - рис.9а [10] стр.159;
приемоиндикатор 7 реализуется в соответствии со схемой, приведенной на фиг.2, при этом входящие в его состав блоки могут быть выполнены в следующем виде:
каналы обработки 43 могут быть реализованы в виде блока поиска и слежения 44 и измерителя разности времени 46, выполненных, как описано в [2], стр.83, и демодулятора 45, выполненного, как описано в [2], стр.86;
БЭВМ 47 может быть реализована, например, по структурной схеме, приведенной на рис.16. в [2], стр.87.
Временная диаграмма работы бортовой аппаратуры 1 предлагаемого устройства для определения местоположения приведена на фиг.5. В целом, устройство для определения местположения функционирует следующим образом: в штатном режиме работы (фиг.5а, участок Тшро) перед началом сеанса навигационных определений на борту ЛА с пульта ввода информации (ПВИ) 4 вводят исходные данные о положении определяющегося объекта (ввод координат ЛА с точностью до 1 км), фиг.5а участок τид, которые через элемент ИЛИ 15 и нормально замкнутые контакты переключателя 6 поступают на информационный вход приемоиндикатора ПИ 7, который является входом исходных данных БЭВМ 47, входящий в состав ПИ 7 (см. фиг.2), и ПИ 7 осуществляет решение навигационной задачи (НЗ) по сигналам НИСЗ оптимального созвездия: сигналы всех НИСЗ, находящихся в зоне видимости ЛА, через антенну 8 поступают на вход приемника 42, который является сигнальным входом ПИ 7.
БЭВМ 47 на основании априорных данных, полученных с ПВИ 4, определяет оптимальное созвездие НИСЗ для проведения навигационных определений и дает сигнал в каналы обработки для поиска и слежения за требуемыми сигналами с помощью блоков поиска и слежения за сигналом 44; затем производится с помощью измерителя разности времени 46 определение момента прихода сигнала относительно бортовой шкалы времени, формируемой эталоном частоты и времени (ЭЧВ) 22; демодулятор эфемеридной и служебной информации 45 расшифровывает данные о моменте излучения сигнала, положении НИСЗ в этот момент и его векторе скорости(фиг.5а, участок τизм). Полученные данные поступают в БЭВМ 47 для вычисления координат места ЛА, (фиг.5а, участок τр), например, по одному из алгоритмов, описанных в [11] гл. 3. Данный алгоритм может быть реализован с помощью БЭВМ, структура которой приведена, в [2] стр.87, 88, рис.16. Вычисленные значения координат ЛА выдается с выхода БЭВМ 47, который является выходом ПИ 7, на объединенные входы индикатора ИТК 10 и блока памяти БПТК 11 (через нормально замкнуты контакты ПК 9), а также на вход ДШ 15; в дешифраторе ДШ 15 по полученным измеренным значениям координат ЛА определяется номер той контрольной станции, в зоне действия которой в данный момент находится (фиг.5а, участок τи). Точные координаты всех функционирующих КС (примерно 10-15) хранятся блоке памяти БПКС 18. После определения номера КС на соответствующем выходе ДШ 15 появляется сигнал, который поступает на соответствующую ячейку блока памяти БПКС 18, в которой хранятся точные значения координат данной КС.
Одновременно сигнал с выхода ДШ 15 подается через элемент ИЛИ 16 на вход синхронизатора СХР 17, при этом на его выходе формируется последовательность тактовых импульсов, длительность которых определяет время работы ПИ 7 в режиме определения дифференциальных поправок (фиг.5а, участок Тдп), а интервал времени между импульсами определяет время работы ПИ 7 в штатном режиме (фиг.5а, участок Тшр). Последовательность импульсов с выхода СХР 17 по управляющим цепям подается на управляющие входы блоков памяти 11, 18 и 26, через элемент задержки 28 - на управляющие входы переключателей 6, 9 и 23 и вычитателя 12, через элемент задержки 27 - на управляющий вход вычислителя 19, через ДЦ 25 (фиг.5б) - на вход обнуления блока памяти БПДП 13, а через ДЦ 29 (фиг.5в) - на управляющие входы элемента И и блока памяти БПДП 13 и (через элемент задержки 30) на вход обнуления блока памяти БПТК 11. Одновременно с приемом сигналов НИСЗ на антенну 8 бортовой аппаратуры осуществляется прием тех же сигналов НИСЗ на антенну 31 контрольной станции (КС), выход которой соединен со входом первого преобразователя частоты 32, который осуществляет преобразование несущей частоты f1 в промежуточную (ПЧ), на которой происходит усиление сигнала в блоке усиления ПЧ 33, вход которого подключен к выходу первого преобразователя частоты 32. Усиленный сигнал ПЧ подается на вход второго преобразователя частоты 34, где происходит перенос сигнала на несущую частоту f2>f1, затем сигнал на несущей f2 поступает на вход усилителя мощности 35, и далее усиленный сигнал излучается передающей направленной антенной 36, ориентированной на стационарный ИСЗ, где установлен спутниковый ретранслятор (CP) 3 описываемого устройства. СР 3 представляет собой ретранслятор сигналов, аналогичный устанавливаемому на КС, с той лишь разницей, что в спутниковом ретрансляторе осуществляется обратный перенос несущей частоты сигнала с f2 на f1, а передающая антенна ретранслятора, ориентированная в нижнюю полусферу, является слабонаправленной.
После окончания штатного режима, по сигналу тактового импульса, формируемого в СХР 17, устройство переходит в режим определения дифференциальной поправки (см. фиг.5а, участок Тдп). В этот период в БА 1 осуществляется сдвиг бортовой шкалы времени (БШВ): по переднему фронту тактового импульса с выхода синхронизатора СХР 17 на выходы вычислителя сдвига бортовой шкалы времени (ВЛ) 19 выдаются значения точных координат стационарного ИСЗ, хранящиеся в блоке памяти БПС 26, точных координат рабочей КС, хранящиеся в блоке памяти БПКС 18, и текущих координат ЛА, запомненных в блоке памяти БПТК 11, используя которые ВЛ-19 по сигналу, задержанному элементом задержки 27 на время, необходимое для считывая этих данных, вычисляет задержку сигнала НИСЗ оптимального созвездия на трассе его распространения от КС через спутниковый ретранслятор (СР) к ЛА (фиг.5а, участок  ). Эта задержка вычисляется по формуле
). Эта задержка вычисляется по формуле

где С - скорость распространения радиоволн,
Хкс, Укс,Zкс - координаты КС,
Хср, Уср, Zср - координаты СР,
Хтк, Утк, Zтк - текущие координаты ЛА.
Вычисленная задержка используется для проведения сдвига БШВ ЛА для того, чтобы осуществить быстрый поиск и слежение за ретранслированными через КС и стационарный ИСЗ сигналами НИСЗ, с помощью которых определяется дифференциальная поправка к навигационным определениям ЛА. Сдвиг БШВ осуществляется в устройстве формирования БШВ 21 с помощью фазовращателя 23, включенного в сигнальную цепь эталона частоты и времени ЭЧВ 22 через те контакты переключателя ПК 23, которые замыкаются на время действия тактового импульса с выхода синхронизатора 17 (с задержкой на время вычисления сдвига БШВ, формируемой элементом задержки 28, при этом  Величина сдвига БШВ определяется сигналом, поступающим с выхода вычислителя 19 на фазовращатель 24. Таким образом, сигнал с выхода эталона частоты и времени 22 через фазовращатель, положение которого управляется сигналом с ВЛ 19, через переключенные контакты переключателя 23 поступает на эталонный вход ПИ 7. Одновременно на информационный вход ПИ 7 через переключенные (сигналом с элемента задержки 28) контакты переключателя ПК 6 поступают значения точных координат КС, хранящиеся в блоке памяти 18, и ПИ 7 начинает решать НЗ определения координат КС, используя РНП ретранслированных сигналов НИСЗ, поступающих с антенны 8 на сигнальный вход ПИ 7; с выхода ПИ 7 полученные значения координат КС через переключенные контакты ПК 9, переключение которого проведено одновременно с переключением ПК 6 и 23, выдаются на первый вход вычитателя 12, на второй вход которого выдаются точные (истинные) значения координат КС с выхода блока памяти БПКС 18; полученные в результате сравнения измеренных и истинных координат дифференциальные поправки с выхода вычитателя 12 выдаются в блок памяти дифференциальных поправок 13, предварительно обнуленный импульсом, сформированным дифференцирующей цепью 25 по переднему фронту тактового импульса (фиг.5а, участок τл).
Величина сдвига БШВ определяется сигналом, поступающим с выхода вычислителя 19 на фазовращатель 24. Таким образом, сигнал с выхода эталона частоты и времени 22 через фазовращатель, положение которого управляется сигналом с ВЛ 19, через переключенные контакты переключателя 23 поступает на эталонный вход ПИ 7. Одновременно на информационный вход ПИ 7 через переключенные (сигналом с элемента задержки 28) контакты переключателя ПК 6 поступают значения точных координат КС, хранящиеся в блоке памяти 18, и ПИ 7 начинает решать НЗ определения координат КС, используя РНП ретранслированных сигналов НИСЗ, поступающих с антенны 8 на сигнальный вход ПИ 7; с выхода ПИ 7 полученные значения координат КС через переключенные контакты ПК 9, переключение которого проведено одновременно с переключением ПК 6 и 23, выдаются на первый вход вычитателя 12, на второй вход которого выдаются точные (истинные) значения координат КС с выхода блока памяти БПКС 18; полученные в результате сравнения измеренных и истинных координат дифференциальные поправки с выхода вычитателя 12 выдаются в блок памяти дифференциальных поправок 13, предварительно обнуленный импульсом, сформированным дифференцирующей цепью 25 по переднему фронту тактового импульса (фиг.5а, участок τл).
По окончании действия тактового импульса сигнал, сформированный дифференциальной цепью 29 по заднему фронту тактового импульса, поступает на управляющий вход элемента И 20, в результате чего текущие координаты ЛА, хранящиеся в блоке памяти текущих координат 11, через элементы И 20 и ИЛИ 5 и нормально замкнутые контакты переключателя 6 выдаются на информационный вход ПИ 7 (фиг.5а, участок τид), и сформированный сигнал с выхода ДЦ 27 поступает также через элемент задержки 30 (время задержки ЭЗ 30 не менее времени ввода текущих координат с БПТК 11 в ПИ 7, см. фиг.5а, участок τо) на вход обнуления блока памяти 11. Импульсом с ДЦ 29 включается также блок памяти БПДП 13, в котором происходит запоминание дифференциальной поправки на все последующее время до начала нового сеанса работы бортовой аппаратуры в режиме определения ДП (фиг.5а, участок  и далее до окончания Тшр). Значения ДП, хранящихся в БПДП 13, высвечиваются на ИДП 14. С момента обнуления БПТК 11 бортовая аппаратура БА 1 приводится в исходное состояние для работы в штатном режиме навигационных определений, а ПИ 7 переходит на прием сигналов НИСЗ и решает навигационную задачу определения своих координат, текущее значение которых высвечиваются на индикаторе ИТК 10. Работа ПИ 7 в штатном режиме определения своих координат продолжается до тех пор, пока на выходе синхронизатора 17 не сформируется очередной тактовый импульс. Периодичность переключения из штатной работы в режим определения дифференциальной поправки определяется временем, в течение которого значение этой поправки остается справедливым. При переходе из зоны действия данной КС в зону действия соседней КС осуществляется автоматический переход на прием сигналов, ретранслируемых этой КС, так как дешифратор проводит операцию определения номера КС непрерывно по результатам местоопределения ЛА.
и далее до окончания Тшр). Значения ДП, хранящихся в БПДП 13, высвечиваются на ИДП 14. С момента обнуления БПТК 11 бортовая аппаратура БА 1 приводится в исходное состояние для работы в штатном режиме навигационных определений, а ПИ 7 переходит на прием сигналов НИСЗ и решает навигационную задачу определения своих координат, текущее значение которых высвечиваются на индикаторе ИТК 10. Работа ПИ 7 в штатном режиме определения своих координат продолжается до тех пор, пока на выходе синхронизатора 17 не сформируется очередной тактовый импульс. Периодичность переключения из штатной работы в режим определения дифференциальной поправки определяется временем, в течение которого значение этой поправки остается справедливым. При переходе из зоны действия данной КС в зону действия соседней КС осуществляется автоматический переход на прием сигналов, ретранслируемых этой КС, так как дешифратор проводит операцию определения номера КС непрерывно по результатам местоопределения ЛА.
Оператор, находящийся на подвижном объекте, имея перед собойиндикатор дифференциальных поправок, использует полученные поправки для корректировки местоположения ЛА, определяемого с помощью бортового ПИ 7 (фиг.5а, участок τк).
Предлагаемое устройство по сравнению с известным устройством для определения местоположения позволяет увеличить рабочую зону действия устройства до возможного максимума, определяемой пространственной корреляцией дифференциальной поправки, который по оценкам в [4] составляет около 2000 км.
В самом деле, при использовании известного устройства радиус его действия ограничивается пределам прямой видимости ретранслятора КС с ЛА, таким образом, этот радиус зависит от высоты полета и рельефа окружающей местности, и при высоте полета Н ≥3000 м приблизительно равен 200 км.
Для обеспечения высокоточных навигационных определений с использованием дифференциальных поправок на всей территории страны потребовалось бы развертывание значительного количества наземных контрольных станций, строительство которых и обслуживание требуют значительных материальных затрат, а кроме того, развертывание КС в удаленных районах (крайний Север, Дальний Восток, высокогорные районы и т.д.), где и требуется высокоточное навигационное обеспечение, крайне затруднительно, а в высокогорных районах - и нецелесообразно из-за крайне ограниченной рабочей зоны.
В предлагаемом устройстве, в отличие от прототипа, где для навигационных определений используются сигналы, ретранслируемые КС, высокоточные навигационные определения осуществляются по сигналам НИСЗ, которые ретранслируются контрольной станцией на потребитель через дополнительный ретранслятор, установленный на стационарном ИСЗ (Н≈36000 км), что обеспечивает зону покрытия ретранслированными сигналом, равную почти всей территории страны. В этих условиях рабочая зона предлагаемого устройства будет определяться только пространственной корреляцией погрешностей дифференциального режима СРНС "Навстар" и, как указывалось выше, будет иметь радиус не меньше 2000 км.
Таким образом, использование предлагаемого устройства, имеющего большую рабочую зону, ведет к значительному, в 102 раз, сокращению количества КС, что на порядок выше чем у прототипа, необходимых для обеспечения высокоточной навигации на всей территории страны, и упрощению бортовой ЛА, во первых, за счет уменьшения памяти запоминающих устройств и значительного уменьшения объема межблочных кабелей, во-вторых, за счет исключения второй антенны, ориентированной в нижнюю полусферу, с обтекателем, и ее кабелей, что улучшает аэродинамические качества ЛА (установка каждого обтекателя ведет к снижению его скорости на 5%), а все вместе улучшает массо-габаритные эксплуатационные характеристики бортовой навигационной аппаратуры ЛА.
Источники информации
1. PLANS'80, S.P. Teasley. Differential GPS Navigation, p.p. 9-16.
2. Зарубежная радиоэлектроника, № 4, 1983, стр.77, 87, 80-82, 83, 86.
3. Navigation, v.25, № 2, p.193, 1978 г.
4. PLANS'84, C.L. Thornton, L.E. Youg. GPS-Based Certification for Microwave Landing System, p.p. 256-258.
5. Е.П.Балашов, Д.В.Пузанов. Микропроцессоры и микропроцессорные системы, Москва.
6. Куликовский, Справочник по РЭ, т.3.
7. И.Н.Букреев, Б.М.Мансуров, В.И.Горячев. Микроэлектронные схемы цифровых устройств, М.: Сов. радио, 1975.
8. Цифровые радионавигационные устройства, под. ред. В.Б. Смолова, М.: Сов. радио, 1980.
9. Myers R.A. Jn. Proc. of 30-th Annual Symposium of Frequancy Control, 2-4 June, 1976.
10. Справочник по спутниковой связи и вещанию, под ред. Л.Я.Кантора, М.: Радио и связь, 1983.
11. Стеновые спутниковые радионавигационные системы под ред. П.П.Дмитриева и В.С.Шебшаевича, гл.3, М.: Радио и связь, 1982.
12. Справочник по радиолокации, т.2, М.: Сов. радио, 1977.
13. Большие интегральные схемы. Микропроцессорный КМДП комплект, серия КР588. Описание и рекомендации по применению. Минск, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1984 |
|
SU1840490A1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ПОСАДКИ С ИСПОЛЬЗОВАНИЕМ ПСЕВДОСПУТНИКОВ | 2010 |
|
RU2439617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |


Изобретение может быть использовано в радиолокации, в бортовой аппаратуре спутниковых навигационных систем. Устройство для определения местоположения состоит из бортовой аппаратуры, наземной аппаратуры контрольной станции и спутникового ретранслятора, установленного на стационарном ИСЗ. Бортовая аппаратура содержит пульт ввода информации, элемент ИЛИ, первый переключатель, приемоиндикатор, слабонаправленную приемную антенну, второй переключатель, индикатор текущих координат, блок памяти, вычислитель текущих координат, блок памяти дифференциальных поправок, информационный выход индикатора дифференциальных поправок, дешифратор, элемент ИЛИ, синхронизатор, блок памяти координат, вычислитель, элемент И, устройство формирования бортовой шкалы времени, состоящее из эталона частоты и времени, третьего переключателя и фазовращателя, первую дифференцирующую цепь, управляющий вход блока памяти координат стационарного ИСЗ, первый, второй элементы задержки, вторую дифференцирующую цепь, элемент задержки. Наземная аппаратура контрольной станции содержит последовательно соединенные слабонаправленную приемную антенну, первый преобразователь частоты, усилитель промежуточной частоты, второй преобразователь частоты, усилитель мощности, к которому подсоединена направленная передающая антенна. Спутниковый ретранслятор содержит слабонаправленную антенну, первый преобразователь частоты, выход которого подключен ко входу усилителя промежуточной частоты, второй преобразователь частоты, усилитель мощности, передающую слабонаправленную антенну. Технический результат изобретения - расширение рабочей зоны. 7 ил.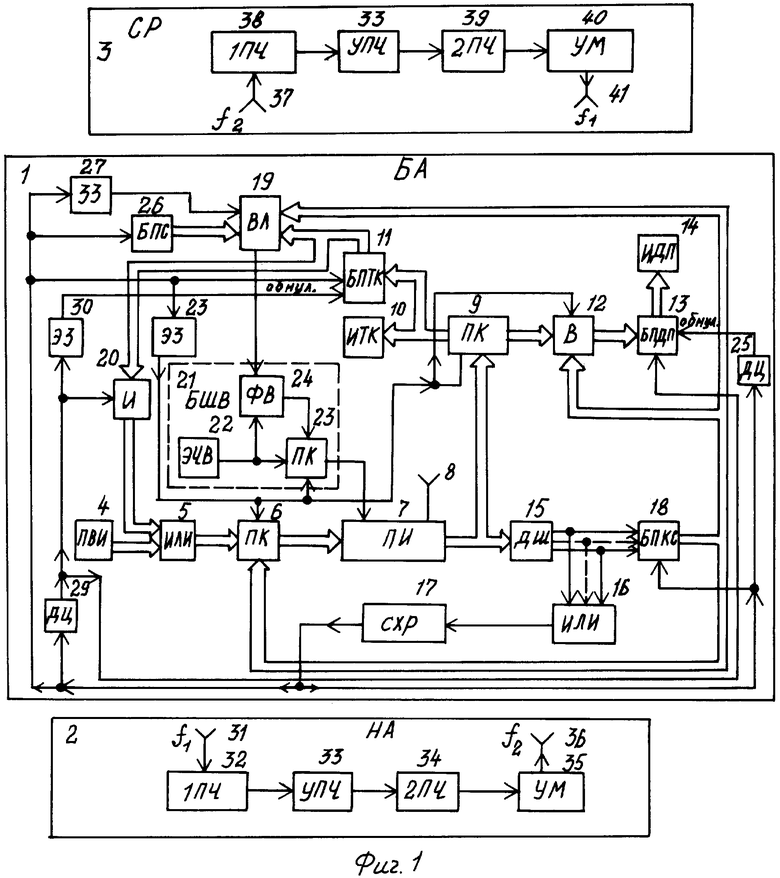
Система для определения дифференциальных поправок к измеряемым координатам подвижного объекта, содержащая бортовую аппаратуру, включающую антенну, последовательно соединенные приемоиндикатор, переключатель, сумматор, первый блок памяти и индикатор дифференциальных поправок, последовательно соединенные дешифратор, элемент ИЛИ и генератор пачки импульсов, второй блок памяти, эталон частоты и времени, при этом выход приемоиндикатора соединен с входом дешифратора, выход дешифратора соединен с адресным входом второго блока памяти, выход которого подсоединен к второму инверсному входу сумматора, а также наземный ретранслятор, отличающаяся тем, что, с целью расширения рабочей зоны устройства, введен спутниковый ретранслятор, а в бортовую аппаратуру дополнительно введены последовательно соединенные третий блок памяти и второй переключатель, а также последовательно соединенные вычислитель, реализующий зависимость

где С - скорость распространения радиоволн,
 - векторы прямоугольных координат наземного ретранслятора, спутникового ретранслятора и текущих координат подвижного объекта соответственно;
- векторы прямоугольных координат наземного ретранслятора, спутникового ретранслятора и текущих координат подвижного объекта соответственно;
 - евклидова норма вектора
- евклидова норма вектора  фазовращатель и третий переключатель, а также четвертый блок памяти, при этом антенна подключена к сигнальному входу приемоиндикатора, информационный вход которого соединен с выходом второго переключателя, а синхронизирующий вход приемоиндикатора подключен к выходу третьего переключателя, ко второму информационному входу которого подключен выход эталона частоты и времени, соединенный также со входом эталонной частоты фазовращателя, ко второму информационному входу второго переключателя подключен выход второго блока памяти, и к которому подключен также первый информационный вход вычислителя для координат наземного ретранслятора, второй информационный вход которого для текущих координат подвижного объекта соединен с выходом третьего блока памяти, информационный вход которого соединен со вторым выходом первого переключателя, а третий информационный вход вычислителя для координат спутникового ретранслятора соединен с выходом четвертого блока памяти, выход генератора пачек импульсов соединен с управляющими входами первого, второго, третьего и четвертого блоков памяти, с управляющими входами первого, второго, третьего переключателей, а также с управляющими входами вычитателя и вычислителя.
фазовращатель и третий переключатель, а также четвертый блок памяти, при этом антенна подключена к сигнальному входу приемоиндикатора, информационный вход которого соединен с выходом второго переключателя, а синхронизирующий вход приемоиндикатора подключен к выходу третьего переключателя, ко второму информационному входу которого подключен выход эталона частоты и времени, соединенный также со входом эталонной частоты фазовращателя, ко второму информационному входу второго переключателя подключен выход второго блока памяти, и к которому подключен также первый информационный вход вычислителя для координат наземного ретранслятора, второй информационный вход которого для текущих координат подвижного объекта соединен с выходом третьего блока памяти, информационный вход которого соединен со вторым выходом первого переключателя, а третий информационный вход вычислителя для координат спутникового ретранслятора соединен с выходом четвертого блока памяти, выход генератора пачек импульсов соединен с управляющими входами первого, второго, третьего и четвертого блоков памяти, с управляющими входами первого, второго, третьего переключателей, а также с управляющими входами вычитателя и вычислителя.

