Изобретение относится к области радионавигации и может быть использовано в качестве спутниковой радионавигационной системы (РНС) с пассивным определением местоположения.
В настоящее время известно большое количество проектов спутниковых РНС для пассивного определения координат, так, например, "Радионавигационная система с использованием искусственного спутника Земли (ИСЗ) и способ пассивного определения дальности" [патент США №3789409, кл. 343-112P за 1974 г.]. В данной системе координаты потребителя устанавливаются путем определения дальности до одного или нескольких спутников, местоположение которых известно потребителю. Каждый спутник излучает многочастотные сигналы, получаемые от стабильного генератора, синхронизуемого по фазе с аппаратурой потребителя, которая формирует такие же многочастотные сигналы. Сравнение фаз сигналов, принятых от спутника, и собственных сигналов позволяет определить расстояние между спутником и потребителем, а это - при известном местоположении спутника - позволит найти местоположение потребителя. Для реализации данного изобретения необходимо иметь на борту навигационного ИСЗ (НИСЗ) и потребителя высокоточные хранители фазы обрабатываемых сигналов, на борту потребителя необходим измеритель фазы колебаний на каждой из используемых частот сигнала, а также вычислительная машина для обработки результатов.
Основными недостатками данной системы являются высокие требования к стабильности хранителей фазы на борту НИСЗ и потребителя, необходимость постоянной коррекции фазы генераторов - хранителей на борту НИСЗ и потребителей, измерители фазы на борту потребителя на всех используемых частотах сигнала. Все это делает аппаратуру потребителя большой по объему и сложной.
В качестве прототипа выбрана спутниковая радионавигационная система "Транзит". Она описана в книге Волосова П.С., Дубинко Ю.С. в др. "Судовые комплексы спутниковой навигации", Л., Судостроение, 1976. Система "Транзит" состоит из 3-х основных компонентов: навигационного ИСЗ, наземной системы обеспечения работы НИСЗ и приемоиндикатора, установленного на борту потребителя навигационной информации.
Данной навигационной системе присущ ряд недостатков:
1) с борта НИСЗ необходимо излучать две частоты, а это ведет к необходимости устанавливать дополнительно умножитель для формирования второй излучаемой частоты;
2) сбор, обработка и проверка данных закладки - это длительный и трудоемкий процесс, требущий привлечения значительных управляющих и вычислительных средств, для постоянного функционирования систем необходима непрерывная работа всего сложного наземного комплекса;
3) командный пункт должен иметь антенны со следящим приводом, обеспечивающим слежение за НИСЗ в большом диапазоне по азимуту со значительными угловыми скоростями;
4) потребитель нуждается в применении сложной аппаратуры:
вычислительной машины, двухчастотного приемника, измерителя допплеровского сдвига, демодуляторе эфемерид, высокостабильного опорного генератора.
Целью настоящего изобретения является сокращение объема и упрощение бортового оборудования потребителя.
Поставленная цель достигается тем, что в спутниковую радионавигационную систему для пассивного определения местоположения объекта, состоящую из наземного комплекса, включающего наземные измерительные пункты, каждый из которых содержит аппаратуру траекторных измерений, командный пункт, связанный с наземными измерительными пунктами двухсторонней линией связи, и вычислительный центр, включенный между выходами наземных измерительных пунктов и входом командного пункта, бортового приемоиндикатора потребителя, содержащего антенно-фидерное устройство, приемник и табло, а также аппаратуры навигационного спутника Земли, содержащей последовательно соединенные задающий генератор, умножитель частоты, модулятор, блок связи с антенной, а также антенно-фидерное устройство, выход которого соединен со входом блока связи с антенной, радиоаппаратуру контроля орбиты, выход которой подключен к третьему входу блока связи с антенной, второй выход которого соединен со входом приемника, и программное устройство, подключенное ко входам устройства стабилизации и выходу приемника, в состав аппаратуры навигационного спутника дополнительно введены последовательно соединенные устройство коррекции, устройство управления положением диаграммы направленности, второй выход которого соединен со входом антенно-фидерного устройства, и блок маркировки, включенные между вторым выходом приемника и вторым входом модулятора, при этом второй вход устройства управления положением диаграммы направленности соединен с выходом программного устройства, в бортовой приемоиндикатор потребителя введено устройство запоминания маркирующего признака, установленное между выходом приемника и входом табло, а в каждый наземный измерительный пункт введен контрольный зональный приемник, соединенный линией связи с командным пунктом.
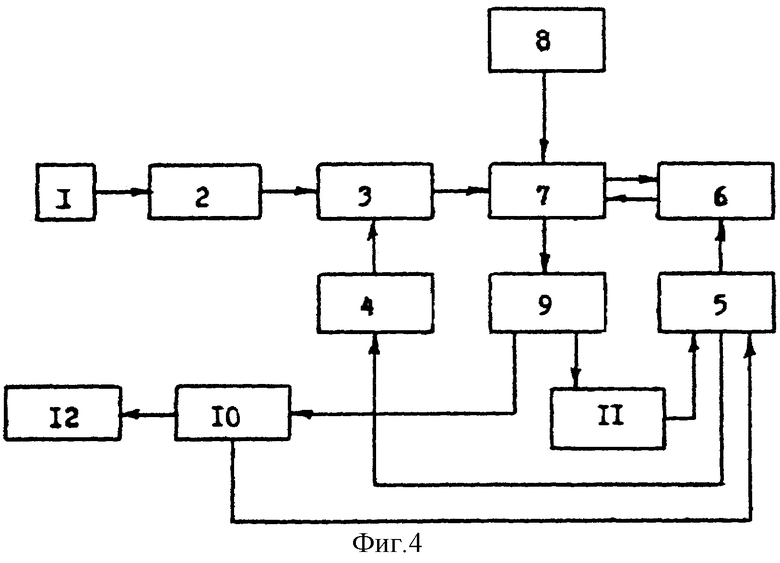
На фиг.1 изображена структурная схема аппаратуры на борту НИСЗ.
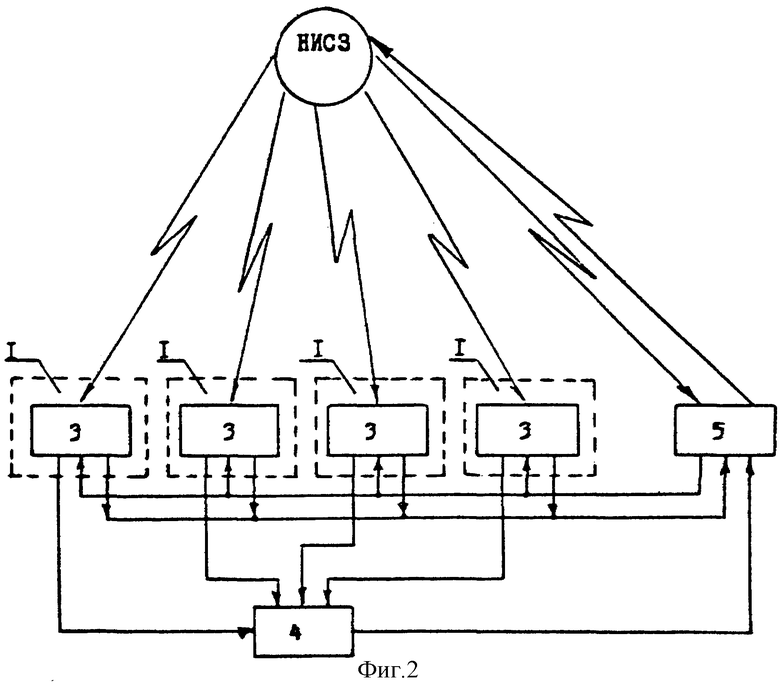
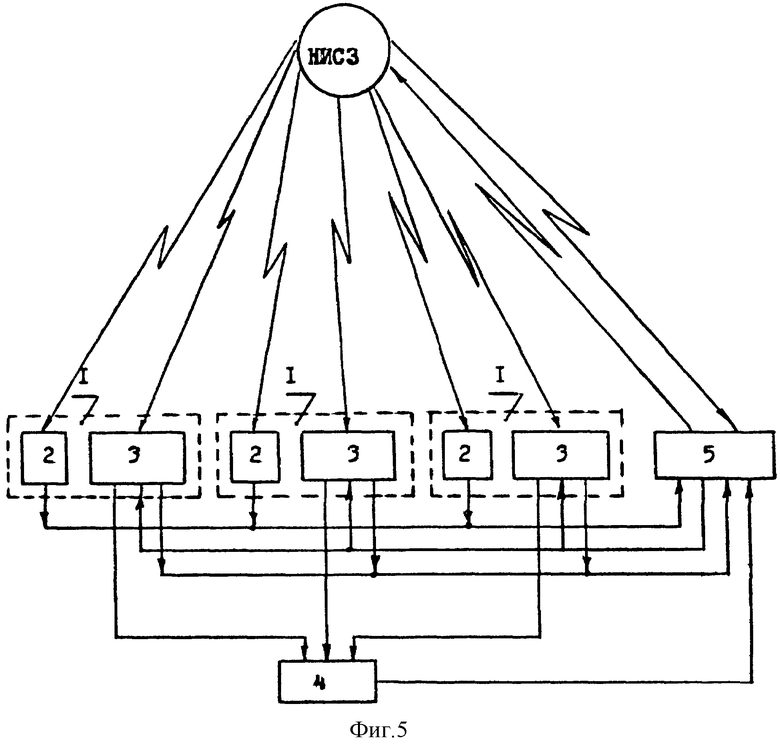
На фиг.2 изображена структурная схема наземного комплекса.
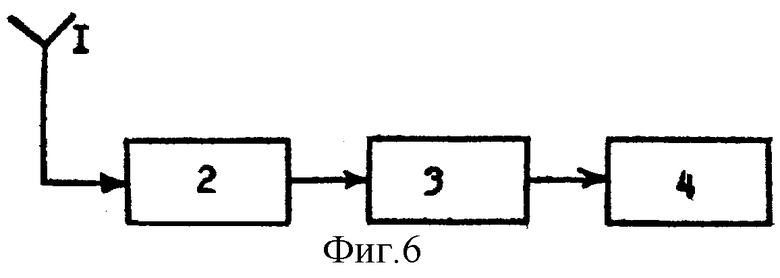
На фиг.3 изображена структурная схема приемоиндикатора.
Аппаратура навигационного ИСЗ, см. фиг.1, включает в себя задающий генератор 1, связанный через уловитель частоты 2 с модулятором 3, с которым, в свою очередь, связан блок маркировки 4, подсоединенный к выходу устройства управления положением диаграмм направленности (ДН) 5. Выход модулятора 3 связан с антенно-фидерным устройством (АФУ) 6 через устройство связи с антенной 7, через которое с АФУ связана также система радиоконтроля орбиты 8. С устройством связи с антенной 7 соединен также приемник 9, соединенный с программным устройством 10 и устройством коррекции 11. Последнее, в свою очередь, связано с устройством управления положением диаграммы направленности 5, которое связано с АФУ 6 для изменения структуры поля в раскрыве антенны. Программное устройство 10 связано с системой стабилизации 12, устройством управления положением ДН 5.
Наземный комплекс навигационной системы, см. фиг.2, состоит из наземных измерительных пунктов (НИП) 1, каждый из которых включает контрольный зональный приемник 2 и станцию траекторных измерений 3, при этом каждая станция траекторных измерений 3 связана с вычислительным центром 4, а также с помощью двухсторонней линии связи - с командным пунктом 5, зональный контрольный приемник 2 соединен с командным пунктом 5, с которым также соединен вычислительный центр 4.
Приемоиндикатор спутниковой навигационной системы, см. фиг.3, включает в себя: АФУ 1, одночастотный приемник 2, устройство запоминания маркирующего признака 3, табло 4. АФУ 1 соединено с входом приемника 2, его выход соединен с устройством запоминания маркирующего признака 3, выход которого соединен с табло 4.
Аппаратура навигационного ИСЗ, см. фиг.1, действует следующим образом. Задающий генератор 1 и умножитель частоты 2 формируют рабочую частоту излучения НИСЗ. Модулятор 3, управляемый блоком маркировки 4, сообщает этой частоте информацию о том, какое пространственное положение заняла диаграмма направленности. Антенна НИСЗ представляет собой антенную решетку с фазовым управлением и имеет ДН в виде узкого луча. Изменяя фазу запитки элементарных вибраторов, устройство управления положением ДН 5 меняет ее положение в 2-х координатах по закону, определяемому программным устройством 10.
Необходимо учесть, что НИСЗ находится на стационарной орбите, т.е. его положение относительно поверхности Земли не меняется. Система стабилизации 12 поддерживает требуемую ориентацию осей НИСЗ относительно центра Земли. Маркирующий сигнал, передаваемый при каждом положении ДН, позволяет наблюдателю однозначно определить его местоположение. На устройство коррекции 11 поступают сигналы НИСЗ, принятые контрольными зональными приемниками 2, см. фиг.2, установленными на НИПах 1. Эти сигналы проходят по наземным линиям связи до командного пункта 5 и от него по служебной линии связи передаются на борт НИСЗ. Устройство коррекции 11, см. фиг.1, сравнивает принятые сигналы с их калиброванными значениями и выдает сигнал для изменения параметров движения ДН в устройство управления положением ДН 5. Таким образом, могут компенсироваться погрешности в работе системы стабилизации НИСЗ 12, а также отклонения в параметрах его орбиты. При выводе НИСЗ на орбиту наземные измерительные пункты 1, см. фиг.2, проводят определение его параметров движения и передают их на ВЦ 4, который обрабатывает полученную информацию и передает через КП 5 команды на борт НИСЗ для изменения его параметров движения. После вывода НИСЗ в заданную точку действуют лишь контрольные зональные приемники 2, которые передают принятые сигналы по наземным линиям связи на КП 5, откуда они поступают на борт НИСЗ для последующей коррекции перемещения ДН.
Сигналы, принятые приемником 2 приемоиндикатора, см. фиг.3, детектируются и поступают на устройство запоминания маркирующего признака 3, которое устроено таким образом, что сигнал, пришедший в следующий навигационный период, вначале стирает ранее запомненный, а потом записывается в устройстве запоминания.
Записанный маркирующий признак индицируется на табло 4. По маркирующему признаку принятого излучения потребитель определяет свое местоположение.
Диаграмма направленности НИСЗ представляет собой узкий луч, следовательно, приемник будет принимать сигналы НИСЗ только в момент, когда потребитель попадает в раскрыв диаграммы направленности НИСЗ. Маркировка излучений НИСЗ меняется в зависимости от того, какое место облучает НИСЗ.
Применение данной навигационной системы позволяет: сократить объем и упростить оборудование бортового приемоиндикатора, а также уменьшить объем работ по наземному обеспечению функционирования систем, т.к. в штатном режиме вычислительный центр и станции траекторных измерений участия в работе не принимают.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК К ИЗМЕРЯЕМЫМ КООРДИНАТАМ ПОДВИЖНОГО ОБЪЕКТА | 1986 |
|
SU1840575A1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2004 |
|
RU2279100C2 |
| Способ управления полетом низкоорбитального космического аппарата через навигационные космические аппараты системы ГЛОНАСС с применением резервного канала передачи с кодовым разделением командно-программной информации | 2022 |
|
RU2800530C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| СПОСОБ АВТОНОМНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ПОЛЬЗОВАТЕЛЯМИ-АБОНЕНТАМИ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, УГЛОВОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ПЕЛЕНГА ПО ФАЗЕ НЕСУЩЕЙ РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ, РЕТРАНСЛИРУЕМЫХ СПУТНИКАМИ | 2004 |
|
RU2286584C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |

Изобретение относится к области радиотехники. Техническим результатом является уменьшение объема работ наземного комплекса по обслуживанию спутниковой радионавигационной системы. Устройство содержит наземный комплекс, включающий наземные измерительные пункты (НИП), каждый из которых содержит аппаратуру траекторных измерений, командный пункт, двухстороннюю линию связи и вычислительный центр. Бортовой приемоиндикатор потребителя содержит антенно-фидерное устройство (АФУ), приемник и табло, аппаратуру навигационного спутника Земли, содержащую задающий генератор, умножитель частоты, модулятор, блок связи с антенной, АФУ, радиоаппаратуру контроля орбиты, программное устройство и устройство стабилизации. Для достижения технического результата устройство снабжено устройством корреляции, устройством управления положением диаграммы направленности, блоком маркировки. Бортовой приемоиндикатор снабжен устройством заполнения маркирующего признака, а каждый НИП снабжен контрольным зональным приемником, соединенным линией связи с командным пунктом. 6 ил.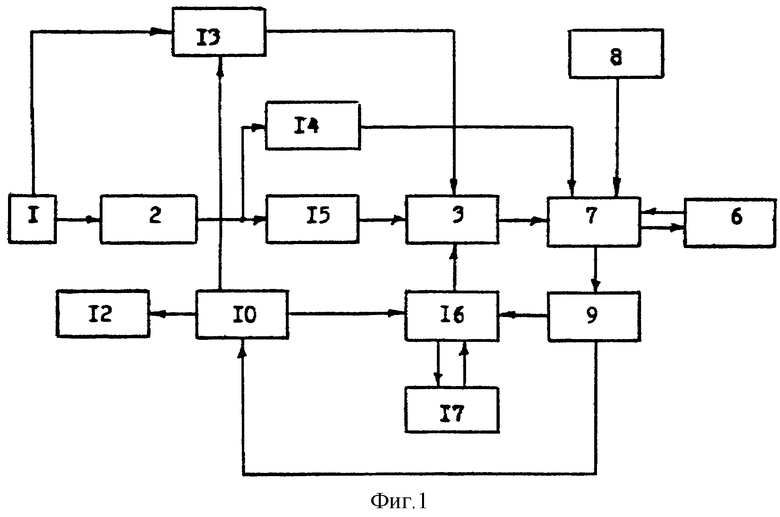
Спутниковая радионавигационная система для пассивного определения местоположения объекта, состоящая из наземного комплекса, включающего наземные измерительные пункты (НИП), каждый из которых содержит аппаратуру траекторных измерений, командный пункт, связанный с НИП двухсторонней линией связи, и вычислительный центр (ВЦ), включенный между выходами НИП и входом командного пункта, бортового приемоиндикатора потребителя, содержащего антенно-фидерное устройство (АФУ), приемник и табло, а также аппаратуры навигационного спутника Земли, содержащей последовательно соединенные задающий генератор, умножитель частоты, модулятор, блок связи с антенной, а также АФУ, выход которого соединен со входом блока связи с антенной, радиоаппаратуру контроля орбиты, выход которой подключен к третьему входу блока связи с антенной, второй выход которого соединен со входом приемника, и программное устройство, подключенное ко входам устройства стабилизации и выходу приемника, отличающаяся тем, что, с цельюуменьшения объема работ наземного комплекса по обслуживанию спутниковой радионавигационной системы, в состав аппаратуры навигационного спутника дополнительно введены последовательно соединенные устройство коррекции, устройство управления положением диаграммы направленности, второй выход которого соединен со входом АФУ, и блок маркировки, включенный между вторым выходом приемника и вторым входом модулятора, при этом второй вход устройства управления положением диаграммы направленности соединен с выходом программного устройства, в бортовой приемоиндикатор потребителя введено устройство заполнения маркирующего признака, установленное между выходом приемника и входом табло, а в каждый НИП введен контрольный зональный приемник, соединенный линией связи с командным пунктом.
| Волосов П.С., Дубинко Ю.С | |||
| и др | |||
| "Судовые комплексы спутниковой навигации", 1976 г | |||
| Патент США №3789409, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| Патент США №3858216, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| ПЛАВЯЩИЙСЯ ЭЛЕКТРОД ДЛЯ ЭЛЕКТРОДУГОВОЙ СВАРКИ | 1990 |
|
RU2027572C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для сборки петлевых соединений | 1983 |
|
SU1094670A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРЕСС-МАТЕРИАЛА | 2005 |
|
RU2282645C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

