Изобретение относится к области авиации, в частности к системам обработки материалов летных испытаний (ЛИ) летательных аппаратов (ЛА), способам разработки и исследования систем сопровождения авиационных объектов, и может быть использовано для определения их точностных характеристик. Изобретение может быть использовано также для определения значений координат местоположения составляющих вектора фазовых центров антенн навигационной аппаратуры пользователей спутниковых радионавигационных систем.
Известен способ определения координат местоположения составляющих вектора скорости навигационных искусственных спутников Земли (НИСЗ) и пользователей спутниковых радионавигационных систем (СРНС), реализованный в СРНС второго поколения систем ГЛОНАСС и GPS (см. В.С.Шебшаевич, П.П.Дмитриев и др. «Сетевые спутниковые радионавигационные системы». - М.: Радио и связь, 1993).
Каждый из навигационных спутников ГЛОНАСС и GPS непрерывно передает собственные навигационные сообщения, содержащие информацию, на основании которой на навигирующихся объектах (пользователях СРНС) навигационной аппаратурой пользователей (НАЛ) осуществляют одновременный прием навигационных радиосигналов не менее чем четырех НИСЗ, измерения псевдодальностей между навигирующимися пользователями и НИСЗ и производят расчеты, необходимые для решения навигационной задачи. Геометрическим эквивалентом конечного алгоритма решения навигационной задачи этого способа является построение относительно используемых НИСЗ поверхностей положения, точка пересечения которых является искомым положением пользователей.
Навигационные сообщения, передаваемые каждым НИСЗ, содержат следующую информацию:
- информацию о состоянии спутников систем, позволяющую пользователям сделать вывод о целесообразности использования данных, передаваемых спутниками для навигационных определений;
- поправки к эталонам времени и частотам спутника, данные альманаха об эфемеридах (эфемериды - значения координат НИСЗ в геоцентрической системе координат, рассчитанные для фиксированных моментов времени по результатам прогнозирования движения НИСЗ);
- параметры для введения поправок задержки навигационных радиосигналов спутников при их распространении через ионосферу и др.
Формирование массивов навигационной (служебной) информации (время, эфемериды, параметры для введения поправок, составляющие вектора скорости спутника и т.д.), а также передачу (загрузку) их в память ЭВМ соответствующих НИСЗ, производят контрольными станциями (КС), контролирующими орбиты НИСЗ, расхождение шкал времени НИСЗ с системным временем и прогнозирование эфемерид каждого НИСЗ.
Используя информацию навигационных сообщений, принятых НАП, и измерения псевдодальностей до выбранных НИСЗ, устанавливают функциональные зависимости между известными координатами НИСЗ и неизвестными координатами пользователей СРНС. Определение координат пользователей сводится к решению системы навигационных уравнений с 4 неизвестными. В результате решения системы навигационных уравнений определяют четыре неизвестных: три координаты местоположения пользователя (ХП,YП,ZП) и поправку к его шкале времени (поправка к его часам).
Аналогичным образом с использованием результатов измерений квазискоростей определяют три составляющих вектора скорости пользователя (ХП,YП,ZП) и поправку к частоте местного эталона частоты, используемого для формирования шкал времени.
Данный способ характеризуется следующей совокупностью действий:
- определение координат НИСЗ, составляющих вектора скорости путем решения навигационных систем уравнений;
- прогнозирование эфемерид НИСЗ ГЛОНАСС путем численного интегрирования дифференциальных уравнений движения НИСЗ;
- измерение псевдодальностей от объекта до каждого видимого НИСЗ путем измерения фазового сдвига между псевдослучайными последовательностями (ПСП), сформированными каждым спутником, каждая из которых синхронизирована по собственному эталону времени, и ПСП, сформированной в месте приема (в НАП объекта);
- измерение квазискорости путем измерения приращений дальностей на несущей частоте с использованием систем фазовой автоподстройки частоты (ФАПЧ);
- прием НАП навигационных радиосигналов НИСЗ и измерение псевдодальностей, радиальных псевдоскоростей НИСЗ;
- определение координат, составляющих вектора скорости пользователей путем решения систем навигационных уравнений.
Недостатками известного способа являются:
- наличие наземной сети КС, осуществляющих определение координат местоположения НИСЗ (эфемерид);
- прогнозирование эфемерид каждого НИСЗ;
- погрешности навигационных определений, обусловленные нестабильностью частот генераторов НИСЗ и опорных генераторов объектов, сдвигом шкал времени объектов относительно шкал времени НИСЗ, а также погрешности, вносимые вобуляцией (сдвигом) времени начала следования кодированных последовательностей, введенной для снижения точности с/а - сигнала GPS.
Известен патент US №7.164.383 В2 от 16.01.07, G01S 5/14 «Навигационная система с использованием GPS в локальной зоне».
В навигационной системе с использованием GPS в локальной зоне применяется дифференциальный метод позиционирования (DGPS). Система включает в себя по крайней мере три опорные станции, главную станцию, расположенные на небольшом расстоянии друг от друга (15 - 1500 м) и LAAS (Local Area Augmentation System) приемник, расположенный на удаленном объекте. Каждая из опорных станций принимает GPS сигналы от спутников, определяет соответствующие псевдодальности и передает их на главную станцию по каналам связи. Главная станция принимает псевдодальности от опорных станций, вычисляет дифференциальные поправки и передает их на LAAS приемник. Приемник LAAS принимает GPS сигналы от спутников, дифференциальные поправки от главной станции и вычисляет свое точное местоположение. Дальность распространения дифференциальных поправок не превышает 37 км. Система работает в реальном масштабе времени.
Однако данная система, основанная на относительных измерениях, имеет существенные ограничения по дальности и не может использоваться на больших протяженных трассах.
Известен способ определения координат местоположения, составляющих вектора скорости, дальности и траекторных измерений навигирующим объектом по навигационным радиосигналам космических аппаратов спутниковых радионавигационных систем (см. патент РФ на изобретение №2152048, G01S 5/00 от 27.06,02., взятый за прототип), в котором антенно-приемным устройством, установленным на объекте, принимают навигационные радиосигналы спутников, содержащие в своем составе значения эфемерид, составляющие вектора скорости спутников, а также информацию для введения поправок к частоте и задержке, измеряют дальности от объекта до каждого спутника путем измерения временных сдвигов кодовых последовательностей, формируемых генераторами спутников относительно кодовой последовательности, выдаваемой генератором объекта с помощью системы слежения с задержкой (ССЗ), а также вычисляют составляющие вектора скорости объекта путем измерения принимаемых доплеровских сдвигов частоты с помощью систем слежения за несущей (ССН) и определяют координаты местоположения и составляющие вектора скорости объекта. Параллельно или последовательно во времени принимают радионавигационные сигналы спутников и по принятым эфемеридным данным вычисляют: проекции N векторов - баз, соединяющих два положения фазовых центров антенн навигационных искусственных спутников Земли (НИСЗ) на орбите, определяемые мерными интервалами, путем вычитания одноименных компонент векторов положения фазовых центров антенн НИСЗ; модули N векторов - баз, значения направляющих косинусов, характеризующих направления векторов - баз в пространстве; значения косинусов углов между векторами-базами, и вектор положения фазового центра антенны навигационной аппаратуры пользователей (НАП) на объекте, а также значения их углов; скорости движения НИСЗ по орбите, радиусы орбит НИСЗ, затем измеряют дальности между фазовым центром антенны НАП объекта и фазовым центром антенн спутников, находящихся в точках пересечения векторов-баз, устанавливают систему линейных навигационных уравнений между известными значениями направляющих косинусов векторов - баз и неизвестными значениями направляющих косинусов векторов - дальностей, дифференцируют уравнения по времени и с использованием измеренных радиальных скоростей, приращений дальности, скоростей изменения приращения дальностей с применением ССН определяют координаты местоположения, значения составляющих векторов скорости фазового центра антенны НАП путем решения соответствующих систем уравнений. По эфемеридным данным определяют значения косинусов углов и значения углов между N векторами -базами путем решения уравнений, определяющих их функциональные зависимости. В состав эфемерид, рассчитанных по результатам прогнозирования движения спутников для определенных моментов времени, в память спутников закладывают значения модулей и значения направляющих косинусов векторов-баз, определяемые мерными интервалами, и размножают их на текущие мерные интервалы.
Однако данный дифференциальный способ определения координат местоположения, составляющих вектора скорости, дальности ЛА по навигационным радиосигналам космических аппаратов радионавигационных систем не позволяет с необходимой точностью проводить летные исследования на больших удалениях от базовой станции на протяженных трассах.
Технический результат, на достижение которого направлено данное изобретение, состоит в повышении точности методом абсолютного позиционирования по фазовым измерениям (АПФ) траекторных определений координат местоположения ЛА на больших протяженных трассах при проведении летных исследований, где отсутствуют наземные радионавигационные станции.
Существенные признаки.
Для получения указанного технического результата в способе высокоточных измерений траекторных координат летательного аппарата в летных исследованиях на трассах большой протяженности, основанном на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем, осуществляют следующие операции:
- проведение измерения фазового сдвига между принятыми сигналами каждого космического аппарата спутниковой навигационной системы (СНС) и сигналами приемника ЛА;
- определение в наземном вычислителе текущего положения ЛА путем решения уравнений, составленных по измерениям фазовых сдвигов сигналов СНС;
- решение навигационной задачи определения геодезических координат: В, L, Н (геодезические В - широта, L - долгота, Н - высота над эллипсоидом) в координатной системе WGS-84;
согласно изобретению после полета определяют координаты ЛА методом абсолютного позиционирования по фазовым измерениям (АПФ). Для этого используют точные эфемериды и точные времена спутников. Точные эфемериды и точные времена спутников определяются Международной службой GPS (МТС) через систему Интернет. Координаты спутника вычисляют по элементам кеплеровской орбиты, которые содержатся в данных эфемерид. Алгоритм определения координат ЛА реализуют в виде последовательности вычислений, включающей в себя учет запаздывания ионосферной задержки по модели Клобучара и тропосферой задержки по модели Блэка, фиксирование целочисленного решения по кодовым последовательностям приемника СНС, определение методом наименьших квадратов координат ЛА по фазовым измерениям приемника СНС с разрешением фазовой неоднозначности использованием алгоритма с плавающим решением. Полученные прямоугольные координаты местоположения ЛА преобразуют в геодезическую систему координат.
Следует отметить, что точность измерения эфемерид спутников GPS составляет 2-3 м, а ошибки часов спутника могут доходить до 10 нс, что может привести к ошибке позиционирования до 3 м. Поэтому целесообразно для получения точных координат ЛА методом АПФ пользоваться точными поправками эфемерид и точными поправками часов спутников. Для обработки данных методом АПФ необходимы данные (файлы) точных эфемерид и времени, что означает невозможность обработки в режиме АПФ в день получения данных. Файлы точных эфемерид и времени формируются организациями и структурами МГС, использующими данные спутниковых приемников, распределенными по всему миру. Эти файлы «выкладываются» в Интернете без ограничений в доступе. Задержки появления в Интернете файлов точных эфемерид и файлов поправок часов составляют от 1 до 8 суток.
Таким образом, в отличие от дифференциального фазового режима обработки, используемого в прототипе, требующего развертывания базовых станций с известными геодезическими координатами, метод АПФ позволяет использовать данные только одного двухчастотного приемника, расположенного на ЛА, что позволяет обрабатывать данные полетов самолетов на трассах большой протяженности без использования данных наземных базовых станций с точностью 10-40 см.
Тропосферные ошибки в системе обработки сигналов СНС компенсируются моделированием тропосферной вертикальной задержки и использованием фильтра Калмана, а для учета ионосферных ошибок используются фазовые двухчастотные измерения для образования комбинации фаз, свободной от влияния атмосферы.
Для обеспечения сходимости решения при обработке фазовых измерений сигналов СНС, проводимых на ЛА, некоторый период времени проводятся измерения перед взлетом и после посадки.
Перечень фигур на чертежах.
Для пояснения сущности изобретения на фиг.1 приведена функциональная схема измерений сигналов СНС и их наземной обработки, где изображены:
1 - искусственные спутники Земли (ИСЗ) спутниковой навигационной системы (СНС);
2 - летательный аппарат (ЛА);
3 - антенна;
4 - приемник СНС;
5 - комплекс бортовых траекторных измерений (КБТИ);
6, 7 - координаты местоположения взлета и посадки ЛА;
8 - научно-исследовательские организации, МГС;
9 - система Интернет;
10 - наземный вычислитель;
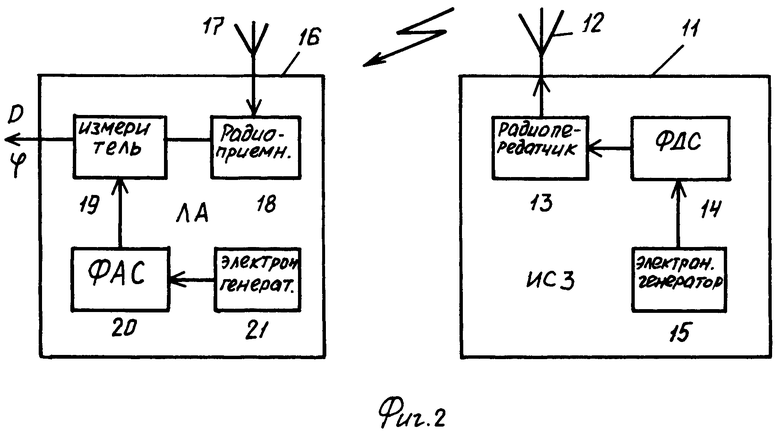
11 - аппаратура ИСЗ;
12 - антенна ИСЗ;
13 - радиопередатчик ИСЗ;
14 - фазово-дальномерная система (ФДС);
15, 21 - электронный генератор (ЭГ);
16 - бортовая аппаратура ЛА;
17 - бортовая антенна ЛА;
18 - радиоприемник (РПМ) ЛА;
19 - измеритель В, L, Н;
20 - формирователь аппаратурного сигнала.
На фиг.2 показан пример структурной схемы аппаратуры передающей части на ИСЗ и приемной части на ЛА.
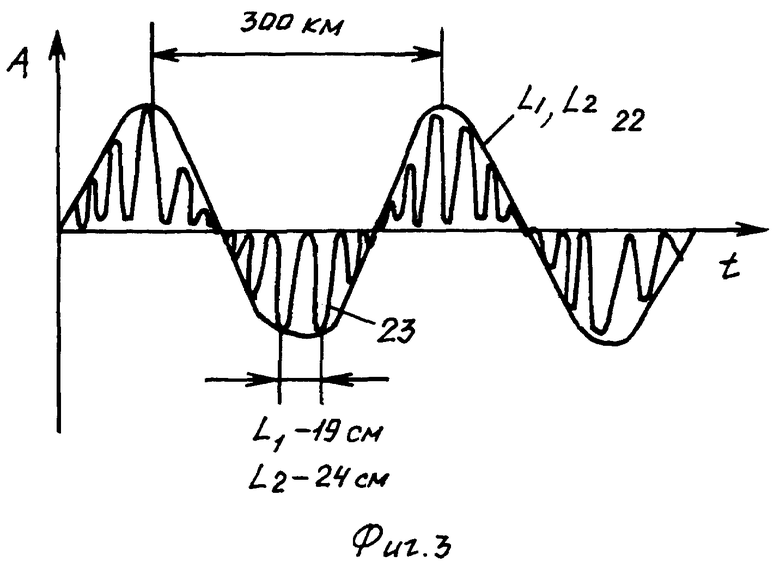
На фиг.3 показан пример определения несущей амплитудной (L1, L2) и фазовой модуляции сигналов, принимаемых приемником на ЛА, где 22 - амплитуда несущей частоты сигнала СНС, 23 - фазовая модуляция.
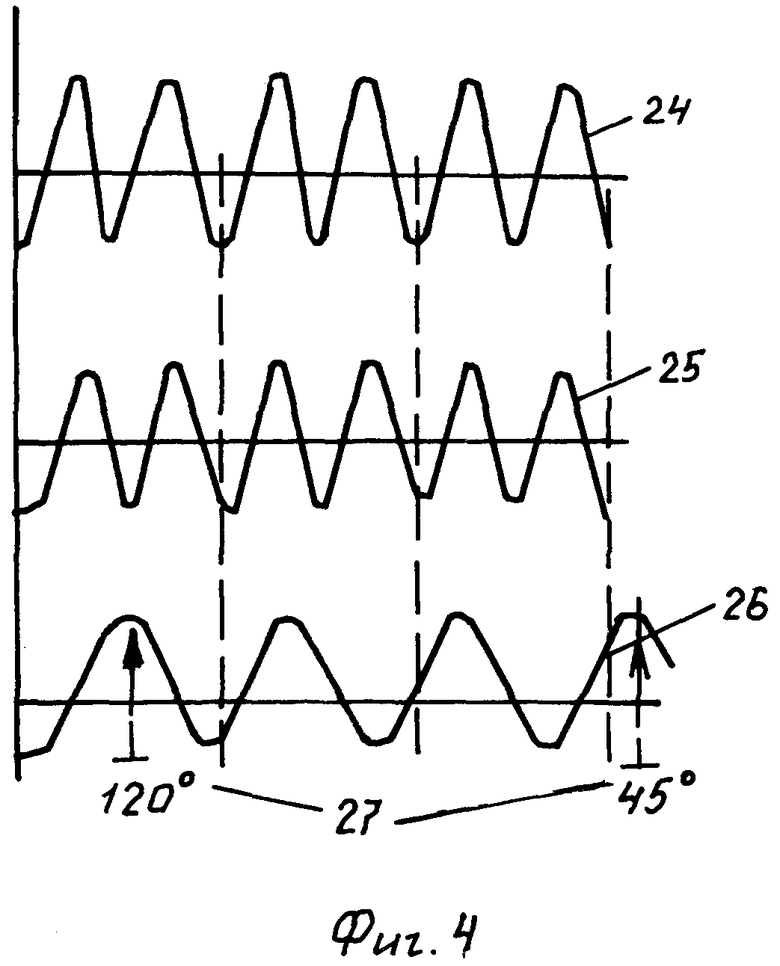
На фиг.4 показаны примеры измерения дробной и полной фазы несущей частоты сигнала СНС, где 24 - фаза сигнала, полученная со спутника с доплеровским смещением, 25 - несущая, созданная в приемнике, 26 - сигнал биений по оси времени.
Способ осуществляется следующим образом.
Способ высокоточных измерений траекторных координат летательного аппарата в летных исследованиях на трассах большой протяженности работает следующим образом. На самолете 2 размещается антенна 3 приемника СНС 4, с помощью которого производят фазовые измерения на двух частотах L1 и L2 навигационных спутников - 1 группировок GPS и ГЛОНАСС. Во время полета информация приемника СНС, выдаваемая в формате RS-232, регистрируется в бортовом блоке комплекса бортовых траекторных измерений (КБТИ) - 5 с частотой 1 Гц. Обработка зарегистрированных сигналов приемников СНС и определение координат местоположения самолета производят после полета в наземном вычислителе - 10, с использованием файлов точных эфемерид и точного времени, полученных научно-исследовательскими организациями 8 и загруженных из Интернета 9, см. фиг.1.
Вычисление координат антенны приемника СНС производят в системе координат, связанной с эллипсоидом WGS-84 (World Geodetic System of 1984). Система координат жестко связана с Землей. Центр прямоугольной системы координат размещается в условном центре Земли. Оси X и Y лежат в плоскости экватора, первая из них пересекает нулевой меридиан. Ось Z составляет с осями X и Y правую тройку, направлена в сторону северного полюса и параллельна оси собственного вращения Земли.
«Сырые» кодовые и фазовые измерения приемника СНС содержат в себе погрешности, зависящие от целого ряда причин. Погрешности в измерении псевдодальностей до навигационных спутников вызывают ошибки в нахождении навигационных параметров антенны приемника СНС. Наиболее существенными из них являются:
- ошибка часов спутника;
- ошибка часов приемника СНС;
- ошибки в эфемеридах спутника;
- искажение сигнала при прохождении слоев ионосферы;
- искажение сигнала при прохождении слоев тропосферы;
- многолучевость;
- случайный шум приемника СНС;
- неоднозначность фазовых измерений.
Дальномерный сигнал формируется на ИСЗ 11 формирователем дальномерного сигнала (ФДС) 14 из колебаний эталонного генератора (ЭГ) 15, см. фиг.2. Подобный генератор 21 на ЛА 2 с помощью формирователя аппаратурного сигнала (ФАС) 20 формирует сигнал по формату, аналогичному дальномерному. При фазовом методе измерения дальности ФДС и ФАС формируют синфазные низкочастотные колебания, обладающие высокой долговременной стабильностью частоты. Входящий в состав бортового оборудования ЛА измеритель 19 (ИЗМ) сравнивает принятый от ИСЗ 11 сигнал с аппаратурным и определяет дальность по времени запаздывания или разности фаз.
Данные СНС основаны на определении разности до нескольких ИСЗ. Достоинством СНС является исключение методической погрешности ΔDc при измерении фазового сдвига между принятыми от нескольких ИСЗ сигналами. При этом эталоны времени - фазы на всех ИСЗ привязаны к единой шкале с высокой точностью.
Длина волны несущей небольшая по сравнению с кодовой псевдодальностью - около 19 см для L1 и 24 см для L2. Т.к. разрешение измерений составляет 1-2% от длины волны, то фаза несущей может быть измерена с миллиметровой точностью, по сравнению с точностью в несколько метров для кодовых измерений. Но фазовое измерение недостаточно, поскольку невозможно отличить (и на L1 и на L2) одну волну от другой. Информация о времени передачи для сигнала на L1 не может быть зафиксирована на несущей волне, поэтому основное фазовое измерение лежит в диапазоне от 0 до 360° - это дробная фаза (120-45° - сигнал биений), 27, см. фиг.4.
Для получения полной фазы несущей в приемнике 18 бортовой аппаратуры - 16 поддерживается слежение за целым числом длин волн несущей (В), в результате которого образуется наблюдение непрерывной (накопленной) фазы (360°N+120°) до (360°(N+B)+45°), 26, см. фиг.4:
 ,
,
где TA - время приемника А,  (ТА) - дробная фаза, измеренная как угол в пределах от 0 до 360°, где 360° соответствует ~19 см для фазы L1 и 24 см для фазы L2, а CR - текущий отсчет по счетчику переходов через ноль, который регистрирует только число целых циклов со времени захвата. Начальный отсчет по счетчику
(ТА) - дробная фаза, измеренная как угол в пределах от 0 до 360°, где 360° соответствует ~19 см для фазы L1 и 24 см для фазы L2, а CR - текущий отсчет по счетчику переходов через ноль, который регистрирует только число целых циклов со времени захвата. Начальный отсчет по счетчику  равен 0, член в квадратных скобках является целым числом. Нижний индекс А относится к приемнику РПМ 18, верхний индекс i - к спутнику 11. Соотношение между фазой
равен 0, член в квадратных скобках является целым числом. Нижний индекс А относится к приемнику РПМ 18, верхний индекс i - к спутнику 11. Соотношение между фазой  и расстоянием
и расстоянием  имеет вид
имеет вид  , где
, где
 - есть целая неоднозначность, a v содержит все смещения и ошибки, влияющие на это измерение. Величина (f0/c) переводит расстояние в единицы циклов.
- есть целая неоднозначность, a v содержит все смещения и ошибки, влияющие на это измерение. Величина (f0/c) переводит расстояние в единицы циклов.  - постоянная во времени величина для каждой отдельной пары «приемник-спутник». Чтобы преобразовать эти наблюдения фазы в расстояние, необходимо определить неоднозначность циклов. Если целое число
- постоянная во времени величина для каждой отдельной пары «приемник-спутник». Чтобы преобразовать эти наблюдения фазы в расстояние, необходимо определить неоднозначность циклов. Если целое число  определено, то полученное «фазовое расстояние» (или «расстояние по несущей») будет очень точным расстоянием (на уровне нескольких миллиметров).
определено, то полученное «фазовое расстояние» (или «расстояние по несущей») будет очень точным расстоянием (на уровне нескольких миллиметров).
Число целых циклов N не наблюдается, приемник 18 ЛА 4 только учитывает изменение в нем. Потеря захвата сигнала счетчика приводит к потере счета циклов в непрерывной фазе. Начальная величина неоднозначности N определяется, что составляет проблему разрешения неоднозначности фазовых измерений.
В приемнике 18 сигнал на промежуточной частоте преобразуется в цифровой форме и выполняет слежение за кодами и фазами с помощью программы в микрокомпьютере. Приемник 18 выполняет операции: начальный захват сигналов спутника 1, отслеживание кодовых и фазовых сигналов, извлечение навигационного сообщения, определение координат пользователя, контроль текущих состояний спутников в созвездии 1. Эти операции приемника контролируются микропроцессором. Программа для микропроцессора является инструкцией работы приемника 18, устанавливается в его памяти.
Микропроцессоры наземного вычислителя 10 работают с цифровым представлением псевдодальностей и фазы несущей. Они получаются в результате преобразования в некоторой точке в цифровом потоке, которые выполняют фильтрацию этих данных с целью уменьшения влияния шума или для получения надежных значений положения и скоростей объекта. Наземный вычислитель 10 имеет клавиатуру и дисплей для интерфейса с пользователем, для ввода команд, опций, данных наблюдения, вспомогательную информацию.
Наземная обработка с помощью вычислителя 10 предполагает операции ввода данных измерений фазового сдвига между принятыми сигналами каждого космического аппарата спутниковой навигационной системы (СНС) и сигналами приемника ЛА из КБТИ 5 (регистратора).
Затем путем абсолютного позиционирования по фазовым измерениям за счет использования точных эфемерид и точного времени спутника, определяемыми Международной службой GPS (МГС) 8 через систему Интернет 9, вычисляют позиции спутника по элементам кеплеровской орбиты, которые содержатся в данных эфемерид, а алгоритм определения координат ЛА реализуется в виде последовательности вычислений, включающей в себя учет запаздывания ионосферной задержки по модели Клобучара и тропосферой задержки по модели Блэка, фиксирование целочисленного решения по кодовым последовательностям приемника СНС, определение методом наименьших квадратов координат ЛА по фазовым измерениям приемника СНС с разрешением фазовой неоднозначности, используя алгоритм с плавающим решением, преобразование полученных прямоугольных координат местоположения ЛА в геодезическую систему координат. Для обеспечения сходимости в алгоритме плавающего решения необходимой точности проводят статические измерения сигналов СНС перед взлетом и после посадки ЛА.
При решении задачи позиционирования в процессе обработки спутниковых данных необходимо знать позиции спутников и точный момент времени излучения сигнала спутником, для определения которого необходимо иметь погрешности времени часов спутника.
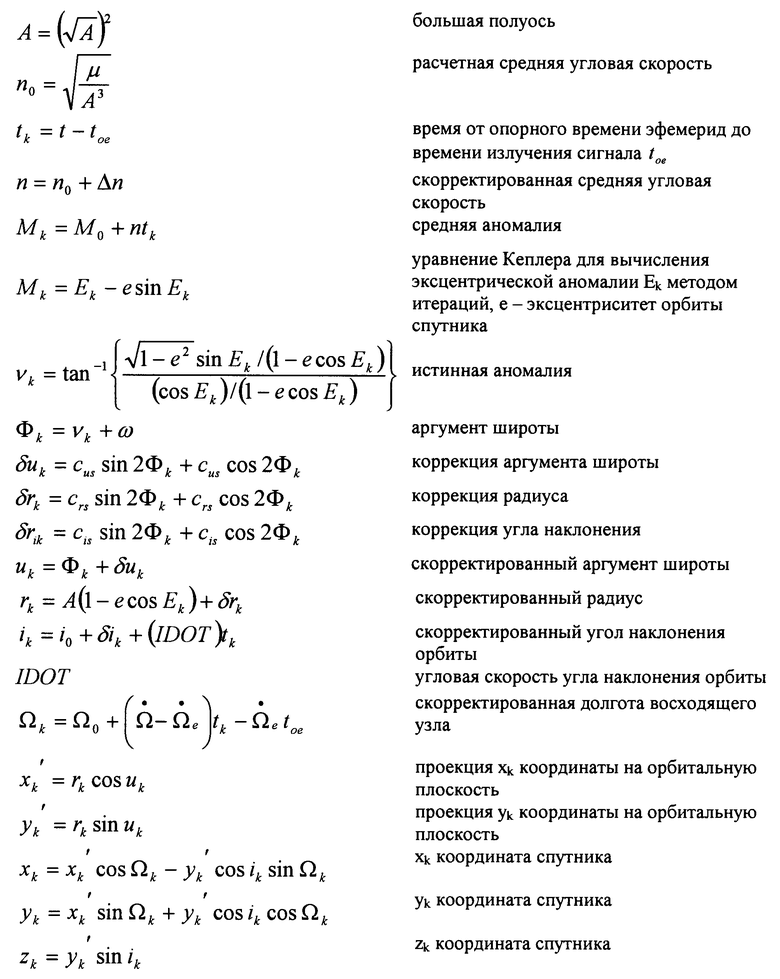
Позиция спутника вычисляется по элементам кеплеровской орбиты, которые содержатся в данных эфемерид, передающихся в навигационном сообщении каждого спутника. Алгоритм определения позиции спутника реализуется в виде последовательности вычислений (Интерфейсный контрольный документ.INTERFACE CONTROL DOCUMENT, Navstar GPS Space Segment /Navigation User Interfaces/ Revision IRN-200C-004, 12 April 2000. ARTNC RESEARCH CORPORATION 2250 E. Imperial Highway, Suite 450 EI Segundo, CA 90245-3509).
Многолетний опыт спутниковых измерений показывает, что точность бортовых эфемерид спутников составляет 2-3 м, а ошибки часов спутника могут доходить до 10 нс, (т.е. до 3 м).
Алгоритм коррекции времени GPS на момент излучения спутником сигнала PRN следующий (контрольный интерфейсный документ ICD-GPS-200C, пункт 20.3.3.3.1):
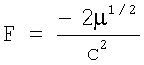
Погрешность часов спутника определяется из уравнения:

где
Для повышения точности вычисления дальности до спутника необходимо знать задержки сигнала при прохождении ионосферы и тропосферы.
Ионосферные задержки при абсолютном методе измерений дают ошибки в расстоянии до 20-30 м и более. Модель ионосферы, полученная из восьми параметров навигационного сообщения спутника, позволяет учесть до 50% ионосферной задержки. Далее приведена модель ионосферы для коррекции ионосферной задержки («модель Клобучара» (Антонович К.М. Использование спутниковых радионавигационных систем в геодезии. В 2 т. Т.2. Монография / К.М.Антонович; ГОУ ВПО «Сибирская государственная геодезическая академия». - М.: ФГУП «Картоцентр», 2006. - 360 с.).

AMP - амплитудный коэффициент.
Коррекция Tiono определяется для L1 частоты. Для частоты L2 коррекция определяется коэффициентом γ



t=4.32 * 104λi+GPS time (сек)
0≤t<86400: иначе, если t≥86400, то вычесть 86400 секунд;
если t<0, то добавить 86400 секунд.
Обозначение элементов, используемых при вычислении ионосферной задержки:
- Элементы, передаваемые спутником в навигационном сообщении:
αn - коэффициенты кубического уравнения, представляющие амплитуду вертикальной задержки (4 коэффициента по 8 бит каждый);
βn - коэффициенты кубического уравнения, представляющие период ионосферной модели (4 коэффициента по 8 бит каждый).
- Элементы, генерируемые наземным вычислителем:
Е - угол места спутника (полуциклы);
А - азимут спутника (полуциклы);
u - геодезическая широта пользователя (полуциклы) WGS-84;
λu - геодезическая долгота пользователя (полуциклы) WGS-84.
- Вычисляемые элементы:
χ - фаза (радианы);
F - фактор наклона;
t - локальное время (сек);
ϕm - геомагнитная широта земной проекции точки пересечения линии визирования с ионосферным слоем (средняя высота слоя предполагается 350 км) (полуциклы);
λi - геодезическая долгота земной проекции точки пересечения линии визирования с ионосферным слоем (полуциклы);
ψ - центральный земной угол между позицией пользователя и земной проекцией точки пересечения линии визирования с ионосферным слоем (полуциклы).
При двухчастотных измерениях можно оценить ионосферную задержку и получить псевдодальность, свободную от влияния ионосферы.


где
А - А=40.3·ТЕС является неизвестным параметром;
ТЕС - плотность содержания электронов в ионосфере;
PL1 - псевдодальность, измеренная на частоте L1;
PL2 - псевдодальность, измеренная на частоте L2;
fL1 - частота несущей L1;
fL1 - частота несущей L2.
Псевдодальность, свободная от влияния ионосферы, содержит ошибки часов спутника, эфемерид и тропосферы. Кроме того, она значительно более шумная, чем псевдодальности, измеренные на L1 и L2 (примерно в 3 раза больше).
При двухчастотных фазовых измерениях появляется возможность оценки ионосферного опережения фазы (Антонович К.М. Использование спутниковых радионавигационных систем в геодезии. В 2 т. Т.1. Монография /К.М.Антонович; ГОУ ВПО «Сибирская государственная геодезическая академия». - М.: ФГУП «Картоцентр», 2006. - 360 с.).

где
fL1 - частота несущей L1;
fL2 - частота несущей L2;
λL1 - длина волны L1;
λL2 - длина волны L2;
ФL1 - фаза несущей, измеренная на частоте L1;
ФL2 - фаза несущей, измеренная на частоте L2;
NL1 - целая неоднозначность на частоте L1;
NL2 - целая неоднозначность на частоте L2.
Оценка ионосферной задержки по фазовым измерениям оказывается точной (порядка 1 см), но содержит целые неоднозначности, определение которых является достаточно сложной задачей. Шумные оценки ионосферной задержки по кодам можно сгладить по оценкам дифференциальной задержки (между эпохами) из фазовых измерений. Полученные сглаженные оценки обычно имеют дециметровый уровень точности, после того, как спутник поднялся до угла места 300.
Тропосферные задержки дают ошибки в расстояниях до спутника от 2,5 м в зените до 26 м при до угле места 50. Для оценки тропосферной задержки можно использовать модель Блэка. Формула тропосферной задержки Блэка представляет собой сумму интегралов гидростатической и влажной составляющих преломления показателей по пути луча:
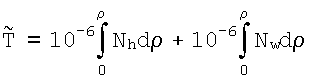
Гидростатическая часть тропосферной задержки представляется выражением:
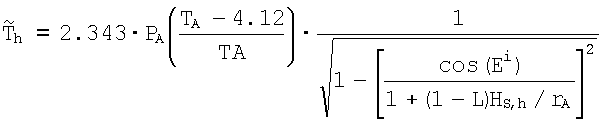 ,
,
а влажная составляющая
 ,
,
где
Nh - гидростатический показатель преломления;
Nw - влажный показатель преломления;
ρ - геометрическая дальность по прямой от пользователя до спутника;
 - гидростатическая часть тропосферной задержки;
- гидростатическая часть тропосферной задержки;
РА - давление в атмосферах;
ТА - температура в градусах Кельвина;
Ei - угол места спутника в градусах;
L - L=0,85;
HS,h - высота HS,h=14898(TA - 4,12);
HS,w - высота HS,h=13000 м над пользователем;
rA - радиус-вектор до станции;
kw - коэффициент климатических условий.
Для абсолютного позиционирования по фазовым измерениям существуют математические модели, позволяющие уменьшить ошибки позиционирования, возникающие в результате прохождении спутникового сигнала через ионосферу и тропосферу. Однако остаются ошибки бортовых эфемерид (2-3 м) и ошибки часов спутника (до 3 м). Для минимизации этих ошибок используются точные орбиты (файлы точных эфемерид и файлы точного времени спутников). Точные эфемериды и точные поправки часов спутников являются продуктами пост-обработки. Они представляются Международной GPS службой (МГС) и другими службами после наблюдений и имеют объявленную точность меньше 5 см в положении и 0.1 нс по времени.
Международная GPS служба (МГС) является международной научной организацией (официально начала действовать с 1 января 1994 года), которая собирает, архивирует, распределяет данные наблюдений ГЛОНАСС/GPS приемниками и использует их для расчета высокоточных эфемерид спутников, параметров вращения Земли, координат и скоростей станций слежения и спутников, а также информацию об ионосфере и тропосфере. МГС состоит из сети станций наблюдений, расположенных по всему миру, Центров данных, Центров анализа, Координатора анализа, Центрального бюро и Руководящего совета. Точные данные орбит можно получать через систему Интернет 9 непосредственно с сайта МГС (www.igscb.jpl.nasa.gov) без ограничения в доступе. Поскольку они вычисляются по данным, собранным со всех станций мировой сети, то они являются наилучшими из доступных точных орбит.
Успешное решение заявленным способом основывается на непрерывном измерении фазы несущей от как можно большего числа спутников. Это типичная ситуация при измерениях на самолетах. При наличии хорошего качества непрерывных двухчастотных фазовых измерений метод АПФ обеспечивает точность в кинематическом режиме 10-40 см. В статическом режиме точность значительно зависит от времени наблюдений: 24 часа - 2 см, 8 часов - 4 см, 2 часа - 10 см.
После решения навигационной задачи прямоугольные координаты преобразуются в геодезические координаты: В, L, Н (геодезические: В - широта, L - долгота, Н - высота над эллипсоидом) в координатной системе WGS-84.
Таким образом, заявленным способом достигается повышение точности траекторных определений координат местоположения ЛА на больших протяженных трассах при проведении летных исследований, где отсутствуют наземные радионавигационные станции. Кроме того, в отличие от дифференциального фазового режима обработки, требующего развертывания базовых станций с известными геодезическими координатами, метод АПФ использует данные только одного двухчастотного приемника, расположенного на удаленном объекте, что позволяет обрабатывать данные полетов самолетов на трассах большой протяженности с точностью 10-40 см. Заявленный способ может быть использован для определения точностных характеристик и исследования систем сопровождения авиационных объектов.
Изобретение относится к области авиации и может быть использован также для определения значений координат местоположения, составляющих вектора фазовых центров антенн навигационной аппаратуры пользователей спутниковых радионавигационных систем. Достигаемый технический результат - повышение точности измерений траекторных параметров летательных аппаратов (ЛА). Заявленный способ основан на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем, и включает измерение фазового сдвига между принятыми сигналами антенной ЛА от каждого космического аппарата спутниковой навигационной системы (СНС). После полета путем абсолютного позиционирования по фазовым измерениям за счет использования точных эфемерид и точного времени спутника, определяемыми Международной службой GPS (МТС) через систему Интернет вычисляют позиции спутника по элементам кеплеровской орбиты, которые содержатся в данных эфемерид, а алгоритм определения координат ЛА реализуют в виде последовательности вычислений, включающей в себя учет запаздывания ионосферной задержки по модели Клобучара и тропосферой задержки по модели Блэка, фиксирование целочисленного решения по кодовым последовательностям приемника СНС, определение методом наименьших квадратов координат ЛА по фазовым измерениям приемника СНС с разрешением фазовой неоднозначности, используя алгоритм с плавающим решением, преобразуют полученные прямоугольные координаты местоположения ЛА в геодезическую систему координат. 1 з.п. ф-лы, 4 ил., 1 табл.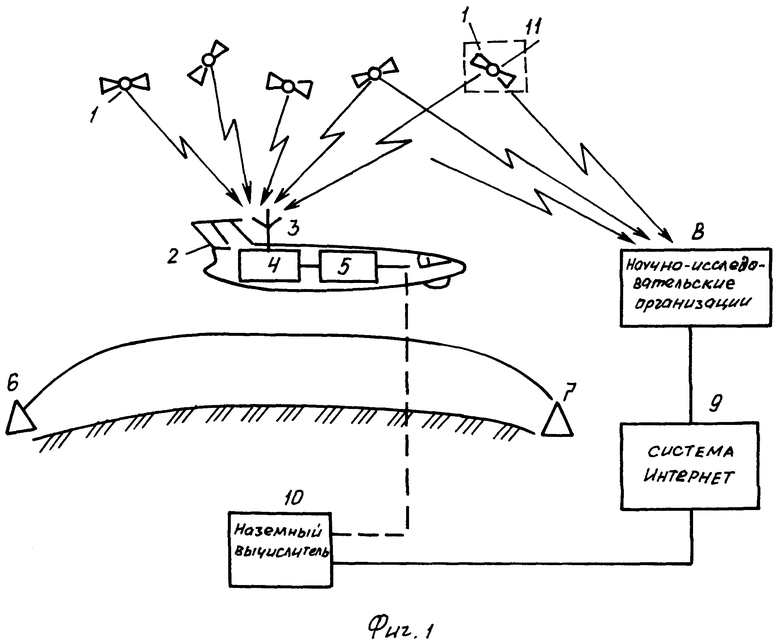
1. Способ высокоточных измерений траекторных координат летательного аппарата (ЛА) в летных исследованиях на трассах большой протяженности, основанный на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем, включающий проведение измерения фазового сдвига между принятыми сигналами каждого космического аппарата спутниковой навигационной системы (СНС) и сигналами приемника ЛА, в наземном вычислителе определение текущего положения ЛА путем решения уравнений, составленных по измерениям фазовых сдвигов сигналов космических аппаратов спутниковой навигационной системы (СНС), решение навигационной задачи определения геодезических координат: В, L, Н (геодезические В - широта, L - долгота, Н - высота над эллипсоидом) в координатной системе WGS-84, отличающийся тем, что после полета с помощью наземного вычислителя путем абсолютного позиционирования по фазовым измерениям за счет использования точных эфемерид и точного времени спутника, определяемыми Международной службой GPS (MГC) через систему Интернет, вычисляют позиции спутника по элементам кеплеровской орбиты, которые содержатся в данных эфемерид, а алгоритм определения координат ЛА реализуются в виде последовательности вычислений, включающей в себя учет запаздывания ионосферной задержки по модели Клобучара и тропосферой задержки по модели Блэка, фиксирование целочисленного решения по кодовым последовательностям приемника СНС, определение методом наименьших квадратов координат ЛА по фазовым измерениям приемника СНС с разрешением фазовой неоднозначности, используя алгоритм с плавающим решением, преобразование полученных прямоугольных координат местоположения ЛА в геодезическую систему координат.
2. Способ высокоточных измерений траекторных координат летательного аппарата в летных исследованиях на трассах большой протяженности по п.1, отличающийся тем, что для обеспечения сходимости в алгоритме плавающего решения необходимой точности проводят статические измерения сигналов СНС перед взлетом и после посадки ЛА.
| US 7164383 В2, 16.01.2007 | |||
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2305859C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280589C2 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| ЕР 1916503 А2, 30.04.2008 | |||
| US 74333795 В2, 07.10.2008 | |||
| WO 03078916 А1, 25.09.2003. | |||

