Изобретение относится к области измерительной техники, конкретно к той ее части, которая занимается вопросами навигации подвижных объектов: самолетов, ракет, кораблей, космических аппаратов и др., путем измерения проекций ускорений при помощи линейных акселерометров и измерителей угловых скоростей с последующим преобразованием их показаний.
Широко известны способы инерциальной навигации подвижных объектов при помощи линейных акселерометров и измерителей угловых скоростей, установленных на объекте, путем измерения проекций линейного ускорения и угловой скорости в каждой точке траектории движения объекта, причем для определения составляющих вектора линейной скорости объекта значения показаний акселерометров интегрируют по времени при помощи вычислителя и часов, измеряющих ньютоново время, а для определения составляющих радиус-вектора объекта выполняют повторное интегрирование полученных результатов [1, 2]. При этом необходимо учитывать показания измерителей угловой скорости объекта и начальные значения искомых параметров.
Можно сказать, что известные способы инерциальной навигации подвижных объектов представляют собой цепочку последовательных по времени преобразований. Для определения составляющих вектора линейной скорости и составляющих радиус-вектора объекта вначале измеряют проекции ускорения при помощи акселерометров и измерителей угловой скорости, а затем интегрируют значения показаний акселерометров по времени при помощи вычислителя и часов, измеряющих ньютоново время, причем интегрируют после получения значений проекций ускорения. Полученные значения, пропорциональные составляющим вектора скорости объекта, повторно интегрируют в том же вычислителе после получения значений, пропорциональных составляющим вектора скорости объекта. Возникает запаздывание по времени появления искомых навигационных параметров - сигналов, пропорциональных составляющим вектора линейной скорости и радиус-вектора объекта. Кроме этого известным способам инерциальной навигации подвижных объектов необходимы дополнительные устройства - интеграторы и часы, измеряющие ньютоново время.
Известные способы инерциальной навигации подвижных объектов осуществляются при помощи различных устройств: акселерометров, интеграторов (вычислителей). В ряду известных акселерометров выделяются дискретные акселерометры, а среди них практический интерес вызывают электромеханические компенсационные, работающие в режиме автоколебаний [3-5]. Принцип измерения линейного ускорения при помощи такого акселерометра заключается в том, что ускорение преобразуют в отклонение подвижной системы акселерометра с последующим преобразованием отклонения в электрический сигнал и после его усиления в последовательность временных интервалов, сформированных с помощью источника стабилизированного тока и элементов нелинейного звена в виде широтно-модулированного сигнала, который преобразуют в момент импульсной обратной связи, под действием которого подвижная система совершает автоколебательное движение, смещение положения динамического равновесия которого зависит от величины и знака измеряемого ускорения, и диапазон измеряемого ускорения ограничен величиной стабилизированного тока, а широтно-модулированный сигнал преобразуют в сигнал, модулированный счетными импульсами, поступающими от генератора импульсов стабилизированной частоты fc, с последующим определением показаний акселерометра в виде числа счетных импульсов n1i и n2i, соответствующих временным интервалам положительного и отрицательного импульсов широтно-модулированного сигнала, их разности Δni=n1i-n2i, суммы ni=n1i+n2i=fсTi и отношения Δni/ni=Nai, причем величину и знак измеряемого ускорения ai определяют с помощью показаний акселерометра и по формуле Nai=Kaiai, (i=1...∞), где Kai=ml/KдмI0 - коэффициент преобразования акселерометра, ml - маятниковый момент подвижной системы акселерометра, Kдм и I0 - коэффициент передачи датчика момента и ток, поступающий от стабилизированного источника. Особенностью такого акселерометра является то, что по его показаниям одновременно с измерением ускорения Nai=Δni/ni=Kaiai можно измерить ньютоново время - время изменения измеряемого ускорения ni=n1i+n2i=fcTi.
Для подтверждения принципа измерения и преобразования ускорения в относительный цифровой код получена математическая модель, которая для подвижной системы (ПС) акселерометра, работающего в режиме автоколебаний, характеризуется взаимодействием совокупности моментов и может быть представлена в операторной форме в виде равенства:

где J - момент инерции ПС; μ - коэффициент демпфирования ПС; с - коэффициент остаточной угловой жесткости подвеса ПС; β - угол отклонения ПС. Здесь Мвх(р)=mlaвх и Мк=КдмIдм - моменты, характеризующие входное и компенсирующее воздействия соответственно, где ai - проекция линейного ускорения, которую измеряет прибор, ml - так называемый маятниковый момент ПС акселерометра, Kдм, Iдм - коэффициент передачи и ток датчика момента (ДМ), Мн(р) - момент неучтенных сил.
Для режима динамического равновесия автоколебаний ПС характерно действие среднего значения тока ДМ Iдм=Icp=I0(n1i-n2i)/(n1i+n2i)=I0Δni/ni за период Ti автоколебаний, в пределах которого и происходит измерение входного воздействия.
Подставляя приведенные выше соотношения в равенство (1), получим уравнение динамики для акселерометра, работающего в режиме автоколебаний при наличии ускорения и возмущений:

причем для режима динамического равновесия, опуская тем самым составляющую периодических колебаний. Как показали аналитические и экспериментальные исследования [1, 2], периодическая составляющая автоколебаний чувствительного элемента (ЧЭ) влияет на потребление электрической энергии и несет незначительную информационную нагрузку, а основным носителем измерительной информации является низкочастотная составляющая, соответствующая характеру изменения входных воздействий и состоянию динамического равновесия подвижной системы (ПС), что позволило дополнительно исключить влияние постоянной времени датчика момента (ДМ). Равенство (2) помогает получить выражение выходной характеристики Ni=Δni/ni=ϕ(ai), устанавливающей связь показаний акселерометра и ускорения, в развернутом виде:

Правая часть полученного равенства представляет собой сумму приведенных моментов, характеризующих действие линейного аi, ускорения, моментов  , соответствующих собственному движению ПС, и моментов неучтенных сил Мн(р), в том числе таких, которые связаны с изменениями условий окружающей среды. Выходная характеристика (3) примет вид:
, соответствующих собственному движению ПС, и моментов неучтенных сил Мн(р), в том числе таких, которые связаны с изменениями условий окружающей среды. Выходная характеристика (3) примет вид:
где  - коэффициент преобразования ускорения.
- коэффициент преобразования ускорения.
Полученное равенство и вышеизложенный способ измерения и преобразования ускорения, положенный в основу акселерометра, работающего в режиме автоколебаний, показывают, что известные способы измеряют линейное ускорение путем определения разности Δni=n1i-n2i, суммы ni=n1i+n2i и отношения импульсов Nai=Δni/ni=ϕ(aвх), соответствующих входному воздействию. Учитывая, что сумма импульсов ni=n1i+n2i=fc(τ1i+τ2i) пропорциональна длительности периода автоколебаний Ti=τ1i+τ2ii, по формуле (4) определяют среднее значение ускорения за период автоколебаний, причем в относительных единицах. Если перейти к абсолютным единицам в импульсах или времени, то возникает возможность измерять и определять изменения ускорения во времени, то есть составляющие вектора скорости и радиус-вектора по направлению оси чувствительности акселерометра, что показывает дополнительные функциональные возможности способа измерения ускорения, реализованного в акселерометре, работающем в режиме автоколебаний.
Целью изобретения является упрощение способа определения навигационных параметров, в том числе составляющих вектора скорости и радиус-вектора по направлению оси чувствительности акселерометра, сокращение времени подготовки навигационной информации и сокращение количества применяемых технических средств за счет расширения функциональных возможностей линейных акселерометров, работающих в режиме автоколебаний.
Указанная цель достигается тем, что в качестве акселерометров используют линейные акселерометры, работающие в режиме автоколебаний, по показаниям которых Δni=n1i-n2i, ni=n1i+n2i=fcTi и Nai=Δni/ni, пропорциональных ускорению и периоду автоколебаний Ti, одновременно с ускорением объекта измеряют интервал времени ni=n1i+n2i=fcTi изменения ускорения, что позволяет определить составляющие вектора скорости и радиус-вектора по направлению осей чувствительности акселерометров на этом интервале, причем для определения составляющих вектора скорости Nνi=KνiVi и радиус-вектора Nri=Kriri значения показаний Nai и ni акселерометра за каждый период автоколебаний Ti перемножают: Nνi=Naini,  результаты для конкретного участка траектории суммируют в соответствии с формулами:
результаты для конкретного участка траектории суммируют в соответствии с формулами:


где i=1...k - любая точка траектории движения объекта, в том числе конечная и соответствующая измерению на интервале i-го периода автоколебаний;
Vi, Vk, ri и rk - составляющие вектора скорости и радиус-вектора в любой i-й и конечной точках траектории соответственно;
 - коэффициенты преобразования по составляющим вектора скорости и радиус-вектора соответственно; Kai и Ka - текущее и среднее значения коэффициента преобразования по ускорению соответственно; fc - частота счетных импульсов. В предлагаемом способе по окончании каждого периода Ti=τ1i+τ2i измерения показаниями акселерометра являются импульсы: n1i, n2i, Δni=n1i-n2i и ni=n1i+n2i, которые используются для определения ускорения
- коэффициенты преобразования по составляющим вектора скорости и радиус-вектора соответственно; Kai и Ka - текущее и среднее значения коэффициента преобразования по ускорению соответственно; fc - частота счетных импульсов. В предлагаемом способе по окончании каждого периода Ti=τ1i+τ2i измерения показаниями акселерометра являются импульсы: n1i, n2i, Δni=n1i-n2i и ni=n1i+n2i, которые используются для определения ускорения  и позволяют одновременно с ускорением определить составляющие вектора скорости Δni=Kaiaini=KaifcVi и радиус-вектора
и позволяют одновременно с ускорением определить составляющие вектора скорости Δni=Kaiaini=KaifcVi и радиус-вектора  направлению оси чувствительности акселерометра, при этом не требуются интеграторы, вычислитель и измеритель времени, что упрощает устройство для осуществления предлагаемого способа. Синхронизация измеряемых навигационных параметров не требует дополнительных средств и времени, осуществляется автоматически в темпе измерения ускорения, что указывает на возможности сокращения времени подготовки навигационной информации.
направлению оси чувствительности акселерометра, при этом не требуются интеграторы, вычислитель и измеритель времени, что упрощает устройство для осуществления предлагаемого способа. Синхронизация измеряемых навигационных параметров не требует дополнительных средств и времени, осуществляется автоматически в темпе измерения ускорения, что указывает на возможности сокращения времени подготовки навигационной информации.
Известные способы измерения линейных ускорений реализуются при помощи известных устройств - акселерометров, работающих в режиме автоколебаний [2-4]. Среди указанных устройств в наибольшей степени предлагаемому соответствует акселерометр [2], принципиальная схема которого представлена на чертеже. На схеме показаны: чувствительный элемент (ЧЭ) и нелинейное звено (НЗ). В состав ЧЭ входит инерционный элемент (ИЭ) 1, датчик угла (ДУ), состоящий из подвижной системы чувствительного элемента (ПС ЧЭ) 2 и датчика перемещений подвижной системы (ДП ПС) 3, датчик момента (ДМ) 7, которые механически и электрически связаны между собой и образуют замкнутый контур управления вместе с элементами, реализующими нелинейное звено (НЗ). Подвижные части ДУ, ДМ и ИЭ называют подвижной системой (ПС) ЧЭ. В состав НЗ входят усилитель-преобразователь (УП) 4, компаратор 5 и электронный ключ (ЭК) 6, а также в состав устройства входят источник стабилизированного тока I0 (ИСТ0) 8 заданного диапазона, генератор счетных импульсов (ГСИ) 9 стабилизированной частоты fc, суммирующий (ССИ) 10 и реверсивный (РСИ) 11 счетчики импульсов, инвертор 12 и умножители 13, 14, 15 блоков ускорения, перемещения и скорости соответственно.
При наличии входного воздействия в виде ускорения ai ИЭ 1 отклоняется на угол β и на ДУ 2 и 3 возникает сигнал в виде напряжения Uду=Кдуβ, которое после усиления в УП 4 в виде сигнала Uуп=КупUду=КдуКупβ поступает на вход компаратора 5, выход которого связан с управляющими входами ЭК 6 и счетчиков 10 и 11 (см. чертеж). При помощи ЭК 6 источник ИСТ0 подключается к ДМ 7. Образуется электрическая цепь импульсной обратной связи за счет формирования импульсов тока ±Iдм, поступающих на обмотку ДМ 7. Одновременно функционирует информационный канал и ГСИ 9 подключается к счетным входам ССИ 10 и РСИ 11. На выходе счетчиков выделяется сумма ni=n1i+n2i=fcTi и разность Δni=n1i-n2i числа импульсов, пропорциональных периоду автоколебаний Ti и входному воздействию, а на выходе умножителя 13 получают информацию в виде Nai=Δni/ni. Значения параметров ni=n1i+n2i=fcTi, Δni=n1i-n2i и Nai=Δni/ni являются показаниями акселерометра, пропорциональными входному воздействию и периоду автоколебаний Ti.
Таким образом, при наличии входного воздействия ai за каждый период автоколебаний Ti на выходе прибора возникают показания ni=n1i+n2i=fcTi, Δni=n1i-n2i, Nai=Δni/ni, Nνi=Naini и  , которые используются для определения ускорения и позволяют одновременно с ускорением определить составляющие вектора скорости и радиус-вектора по направлению оси чувствительности акселерометра.
, которые используются для определения ускорения и позволяют одновременно с ускорением определить составляющие вектора скорости и радиус-вектора по направлению оси чувствительности акселерометра.
Поставленная цель изобретения - упрощение способа определения навигационных параметров, в том числе составляющих вектора скорости и радиус-вектора по направлению оси чувствительности акселерометра, сокращение времени подготовки навигационной информации и сокращение количества применяемых технических средств за счет расширения функциональных возможностей линейных акселерометров, работающих в режиме автоколебаний - достигнута. Полученные выражения (4)-(6) показывают, что при измерении ускорения акселерометром, работающим в режиме автоколебаний, расширяются функциональные возможности способа измерения ускорения, одновременно существенно упрощается процедура определения навигационных параметров: составляющих скорости и радиус-вектора. При помощи измеренных импульсов Δni=(n1i-n2i), ni=(n1i+n2i) и арифметических действий умножения и сложения удалось заменить операции интегрирования перемножением измеренных величин.
Источники информации
1. Андреев В.Д. Теория инерциальной навигации. Автономные системы. - М.: Наука, 1966, с 15-21, 54-62.
2. Ишлинский А.Ю. Механика. Идеи, задачи, приложения. - М.: Наука, 1985, с 369-375.
3. Коновалов С.Ф. и др. Гироскопические системы. 4.3. (Акселерометры, датчики угловой скорости и др.). - М.: ВШ, 1980, стр.4.
4. Скалон А.И. Обобщенный анализ характеристик прецизионных датчиков механических величин, работающих в режиме автоколебаний. // Измерительная техника. - 1990. - С.7-9.
5. Жуков В.Н., Рыбаков В.И., Хегай Д.К. Принципы построения высокочувствительных миниатюрных датчиков систем управления МКА. // Изв. вузов приборостроение. 2004, №3, с.36.
6. Кутуров А.Н., Кулешов В.В. Преобразователь ускорений с относительным цифровым кодом. // Изв. вузов приборостроение. 2003, №9, с 34-37.
Изобретение относится к измерительной технике, а именно к навигации подвижных объектов: самолетов, ракет, кораблей, космических аппаратов. Способ инерциальной навигации заключается в использовании линейных акселерометров, работающих в режиме автоколебаний, по показаниям которых Δni=n1i-n2i, ni=n1i+n2i=fcTi и Nai=Δni/ni=Кaiai, (i=1...∞), пропорциональных ускорению и периоду автоколебаний Тi, где Кai=ml/КдмI0 - коэффициент преобразования акселерометра, ml - маятниковый момент подвижной системы акселерометра, Кдм и I0 - коэффициент передачи датчика момента и ток, поступающий от стабилизированного источника; одновременно с ускорением объекта измеряют интервал времени ni=fcTi, на котором измеряют ускорение, при помощи показаний акселерометра определяют составляющие вектора скорости и радиус-вектора по направлению оси чувствительности акселерометра на этом интервале, причем для определения составляющих вектора скорости Nνi и радиус-вектора Nri, значения показаний Nai и ni акселерометра за каждый период автоколебаний Тi перемножают, а результаты для конкретного участка траектории суммируют. Технический результат - сокращение времени подготовки навигационной информации и сокращение количества применяемых технических средств за счет расширения функциональных возможностей линейных акселерометров. 2 н.п. ф-лы, 1 ил.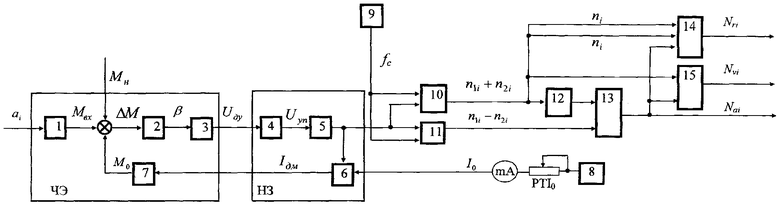
 =Кriri, где Kvi=Kaifс, Kri=Kaif2 c - коэффициенты преобразования по составляющим вектора скорости и радиус-вектора как производные коэффициента преобразования Kai по ускорению, fc - частота счетных импульсов, Vi=aiТi, ri=aiТ2 i - составляющие вектора скорости и радиус-вектора в любой точке траектории, соответствующей каждому i-му периоду автоколебаний и измерений, а результаты для конкретного участка траектории суммируют в соответствии с формулами
=Кriri, где Kvi=Kaifс, Kri=Kaif2 c - коэффициенты преобразования по составляющим вектора скорости и радиус-вектора как производные коэффициента преобразования Kai по ускорению, fc - частота счетных импульсов, Vi=aiТi, ri=aiТ2 i - составляющие вектора скорости и радиус-вектора в любой точке траектории, соответствующей каждому i-му периоду автоколебаний и измерений, а результаты для конкретного участка траектории суммируют в соответствии с формулами
 ,
,  , где i=1...k - любая точка траектории движения объекта, в том числе конечная, и соответствующая измерению на интервале каждого i-го периода автоколебаний, Vi,
, где i=1...k - любая точка траектории движения объекта, в том числе конечная, и соответствующая измерению на интервале каждого i-го периода автоколебаний, Vi,  , ri, и
, ri, и  - составляющие вектора скорости и радиус-вектора в любой i-й и конечной точках траектории соответственно,
- составляющие вектора скорости и радиус-вектора в любой i-й и конечной точках траектории соответственно,  ,
,  - текущее и среднее значения коэффициентов преобразования по составляющим вектора скорости и радиус-вектора соответственно, Кai и Ка - текущее и среднее значения коэффициента преобразования по ускорению соответственно.
- текущее и среднее значения коэффициентов преобразования по составляющим вектора скорости и радиус-вектора соответственно, Кai и Ка - текущее и среднее значения коэффициента преобразования по ускорению соответственно.
| Андреев В.Д | |||
| Теория инерциальной навигации | |||
| Автономные системы | |||
| - М.: Наука, 1966, с.15-21, 54-62 | |||
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| US 4387513 A, 14.06.1983 | |||
| US 6634207 В1, 21.10.2003. | |||

