Изобретение относится к измерительной технике и предназначено для использования в системах автоматического контроля предельно допустимых смещений вращающихся деталей, в частности вала турбомашины.
Известно устройство для сигнализации аварийного состояния турбомашины, описанное в авт. св. N 1321843 от 04.07.85 г., кл. F 01 D 21/04, содержащее два датчика линейных перемещений, расположенные диаметрально противоположно относительно периферийной части вала турбомашины и подключенные через блок сравнения к сигнализатору аварийного состояния. Недостатком этого устройства является его низкая надежность, т.к. отказ любого из схемных элементов приводит к полной неработоспособности устройства.
Известно устройство допускового контроля параметров по патенту N 1798719 от 06.02.91 г., кл. Q 01 R 23/00, содержащее счетчик импульсов, два элемента ИЛИ, два регистра, два коммутатора, блок управления, четыре блока памяти, два блока вычитания, блок диагностики, два блока сравнения кодов, формирователь выходных команд, выход которого является выходом устройства, и два измерительных канала, каждый из которых включает N датчиков контролируемых параметров, выходами соединенных с информационными входами N преобразователей текущих значений параметров в код, при этом информационные выходы преобразователей первого измерительного канала через первый регистр подключены к информационным входам третьего блока памяти и к первым группам входов первого блока вычитания и первого блока сравнения, информационные выходы преобразователей текущих значений параметров в код второго измерительного канала через второй регистр подключены к информационным входам четвертого блока памяти и к первым группам входов второго блока вычитания и второго блока сравнения, синхронизирующие выходы преобразователей текущих значений параметров в код первого и второго измерительных каналов через первый и второй элементы ИЛИ подключены к соответствующим входам блока управления, первый и второй входы которого через первый и второй коммутаторы подключены к входам опроса преобразователей текущих значений параметров в код соответственно первого и второго измерительных каналов, третий и четвертый выходы блока управления соединены с входами разрешения записи первого и второго регистров соответственно, пятый выход блока управления соединен с входами выбора кристаллов третьего и четвертого блоков памяти и блока диагностики, шестой выход блока управления соединен с входами разрешения чтения третьего и четвертого блоков памяти, выходы которых подключены к вторым входам первого и второго блоков вычитания соответственно, седьмой выход блока управления соединен входами выбора кристаллов первого и второго блоков памяти и синхронизирующим входом блока диагностики, выход которого подключен к третьему входу формирователя выходных команд, первый и второй входы которого соединены с выходами соответствующих блоков сравнения, восьмой выход блока управления подключен к синхронизирующему входу формирователя выходных команд и счетному входу счетчика импульсов, выходы которого соединены с адресными входами блока памяти, формирователя выходных команд, коммутатора и блока диагностики, первый и второй входы которого соединены с выходами соответствующих блоков вычитания, выходы первого и второго блоков памяти соединены с вторыми входами первого и второго блоков сравнения соответственно, а выход переполнения счетчика импульсов соединен со своим входом установки нуля.
Это устройство предназначено для контроля за предельно допустимыми значениями N-го числа параметров и может быть использовано в системах сигнализации аварийного состояния турбомашин. Однако оно имеет общие элементы для обработки измерительной информации, формируемой всеми датчиками, такие как блоки памяти, блок управления, счетчик импульсов, блок диагностики и пр., отказ любого из которых нарушает работоспособность устройства, что является его недостатком.
Настоящее изобретение направлено на повышение надежности устройства.
Решение поставленной задачи обеспечивается тем, что в устройство для контроля осевого перемещения вала, содержащее элемент ИЛИ и три измерительных канала, каждый из которых включает два датчика линейных перемещений и два преобразователя аналог-код, введены три блока обработки измерительной информации и ключ, вход которого соединен с источником единичного сигнала, а каждый измерительный канал дополнен двумя сумматорами напряжений и их датчики линейных перемещении расположены симметрично оси контролируемого вала, под углом 180o, причем входы запуска блоков обработки измерительной информации объединены на выходе ключа, и их выходы через элемент ИЛИ соединены с выходом устройства, выходы первых преобразователей аналог-код, входящих в первый и второй измерительные каналы, соединены с информационными входами первого блока обработки измерительной информации, синхронизирующий выход которого подключен к входам опроса этих преобразователей, выходы второго и первого преобразователей аналог-код, входящих в первый и третий измерительные каналы, соединены с информационными входами второго блока обработки измерительной информации, синхронизирующий выход которого подключен к входам опроса этих двух преобразователей, а выходы вторых преобразователей аналог-код, входящих в состав второго и третьего измерительных каналов, и их входы опроса соединены соответственно с информационными входами и синхронизирующим выходом третьего блока обработки измерительной информации, и в пределах каждого измерительного канала первый и второй выходы первого датчика линейных перемещений соединены с первыми входами сумматоров напряжений, вторые входы которых подключены к первому и второму выходам второго датчика линейных перемещений, а выходы сумматоров соединены с информационными входами преобразователей аналог-код.
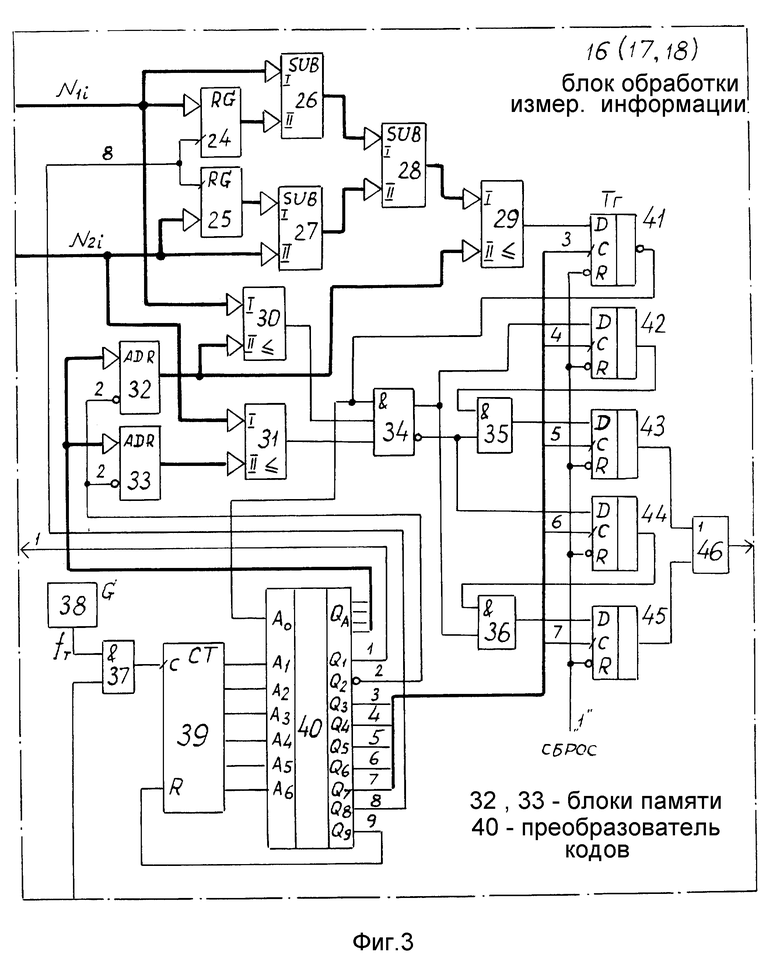
Кроме того, для решения поставленной задачи в каждый из блоков обработки измерительной информации включены два регистра, три вычитателя кодов, три субблока сравнения, два субблока памяти, четыре элемента И, генератор тактовой частоты, счетчик импульсов, преобразователь кодов, пять D-триггеров и элемент ИЛИ, выход которого является выходом блока, при этом первый информационный вход блока соединен с первым входом второго субблока сравнения, с первым входом первого вычитателя кодов и через первый регистр - с вторым входом этого вычитателя, второй информационный вход блока соединен с первым входом третьего субблока сравнения, с вторым входом второго вычитателя кодов и через второй регистр - с первым входом этого вычитателя, первый и второй входы третьего вычитателя кодов соединены с выходами первого и второго вычитателей соответственно, а его выход подключен к первому входу первого субблока сравнения, второй вход которого и второй вход второго субблока сравнения объединены на выходе первого субблока памяти, выход второго субблока памяти соединен с вторым входом третьего субблока, сравнения, выход первого субблока сравнения соединен с информационным входом первого D-триггера, инверсным выходом подключенного к первому входу первого элемента И и к входу младшего адресного разряда преобразователя кодов, другие адресные входы которого соединены с выходами счетчика импульсов, выходы субблоков памяти соединены с вторым и третьим входами первого элемента И, прямой выход которого подключен к информационному входу второго D-триггера и второму входу третьего элемента И, а его инверсный выход - к информационному входу четвертого D-триггера и второму входу второго элемента И, первый вход которого соединен с выходом второго D-триггера, а выход - с информационным входом третьего D-триггера, выход четвертого D-триггера через третий элемент И соединен с информационным входом пятого D-триггера, выход которого и выход третьего D-триггера, соединены с входами элемента ИЛИ, вход запуска блока и выход генератора тактовой частоты через четвертый элемент И подключены к счетному входу счетчика импульсов, первая группа выходов преобразователя кодов соединена с адресными входами субблоков памяти, первый выход этого преобразователя подключен к синхронизирующему выходу блока обработки измерительной информации, его второй выход - к входам разрешения чтения субблоков памяти, третий - седьмой выходы - к синхронизирующим входам первого - пятого D-триггеров соответственно, восьмой выход преобразователя кодов соединен с входами разрешения записи регистров, а его девятый выход - с входом обнуления счетчика импульсов.
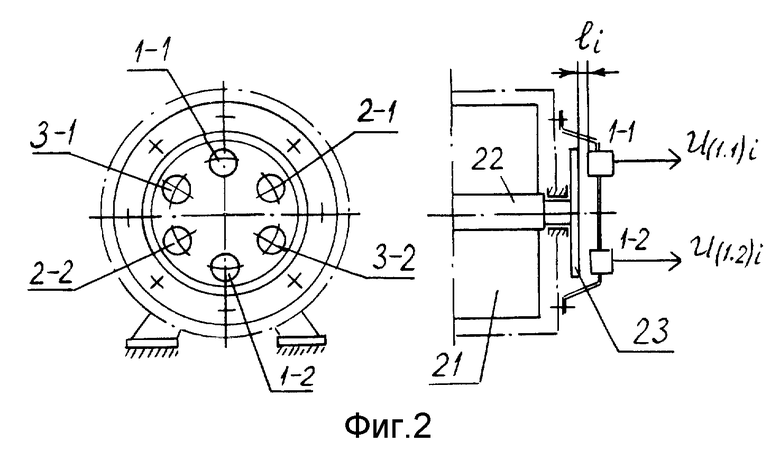
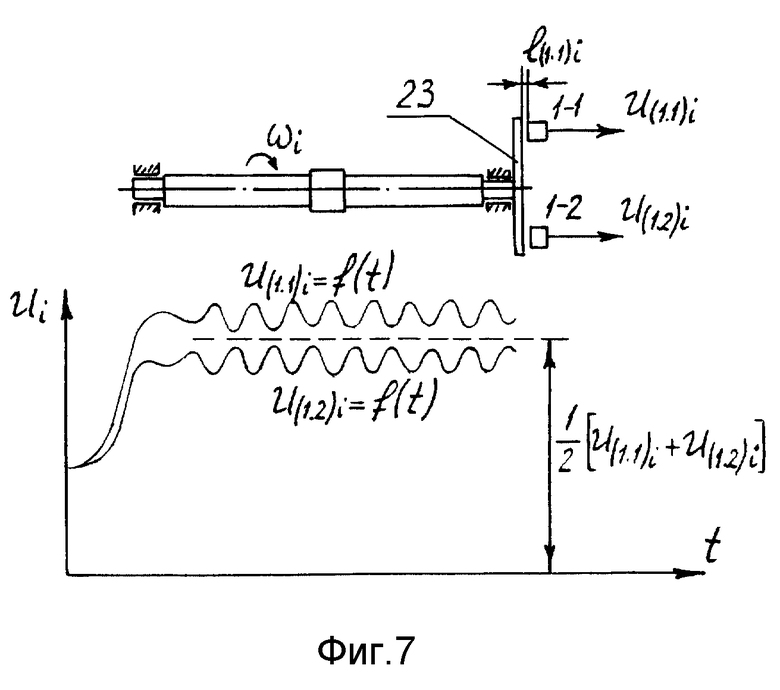
На фиг. 1 приведена функциональная электрическая схема заявляемого устройства; на фиг. 2 - схема расположения датчиков линейных перемещений; на фиг.3 и 4 - схемы блока обработки измерительной информации и преобразователя аналог-код соответственно; на фиг.5 - функциональная схема датчика линейных перемещений и эскиз преобразователя перемещений; на фиг. 6 - принципиальная электрическая схема сумматора напряжений; на фиг. 7 - графики измерительных сигналов, формируемые датчиками каждого из измерительных каналов; на фиг. 8 - временная диаграмма, поясняющая принцип действия устройства; на фиг. 9 - зависимость величины кодового сигнала от осевого смещения вала и на фиг. 10 - структурная схема алгоритма обработки измерительной информации и формирования аварийного сигнала.
Устройство содержит (фиг. 1) датчики 1-1, 1-2, 2-1, 2-2 и 3-1, 3-2 линейных перемещений соответственно первого, второго и третьего измерительных каналов, сумматоры 4. . .9 напряжений, преобразователи 10...15 аналог-код, блоки 16, 17, 18 обработки измерительной информации, элемент ИЛИ 19 и ключ 20.
Датчики 1-1...3-2 линейных перемещений расположены на неподвижной части контролируемой турбомашины 21 (фиг.2), на вал 22 которой насажен ферромагнитный диск 23, образующий с торцевыми поверхностями датчиков некоторый зазор li. Величина этого зазора определяется осевым смещением вала 22. Датчики одного измерительного канала (1-1, 1-2 и т.д.) установлены симметрично оси вала 22 под углом 180o, выдерживаемый с возможно большей точностью.
Каждый из блоков 16, 17, 18 обработки измерительной информации содержит (фиг.3) регистры 24 и 25, вычитатели 26...28 кодов, субблоки 29...31 сравнения, субблоки 32, 33 памяти, элементы И 34...37, генератор 38 тактовой частоты fт счетчик 39 импульсов, преобразователь 40 кодов, D-триггеры 41...45 и элемент ИЛИ 46.
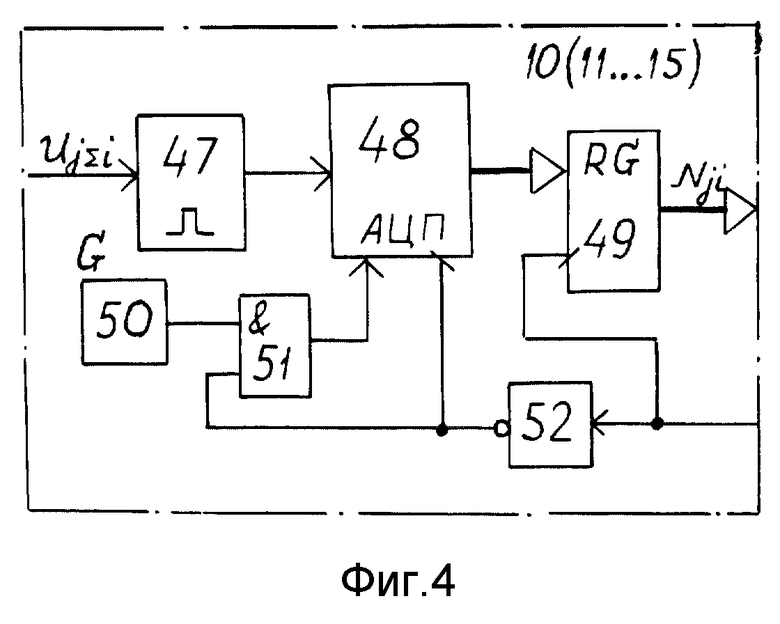
В состав преобразователей 10...15 входят (фиг.4) блоки 47 нормализации входного сигнала, аналого-цифровые преобразователи (АЦП) 48, регистры 49, генераторы 50 тактовой частоты, элементы И 51 и элементы НЕ 52.
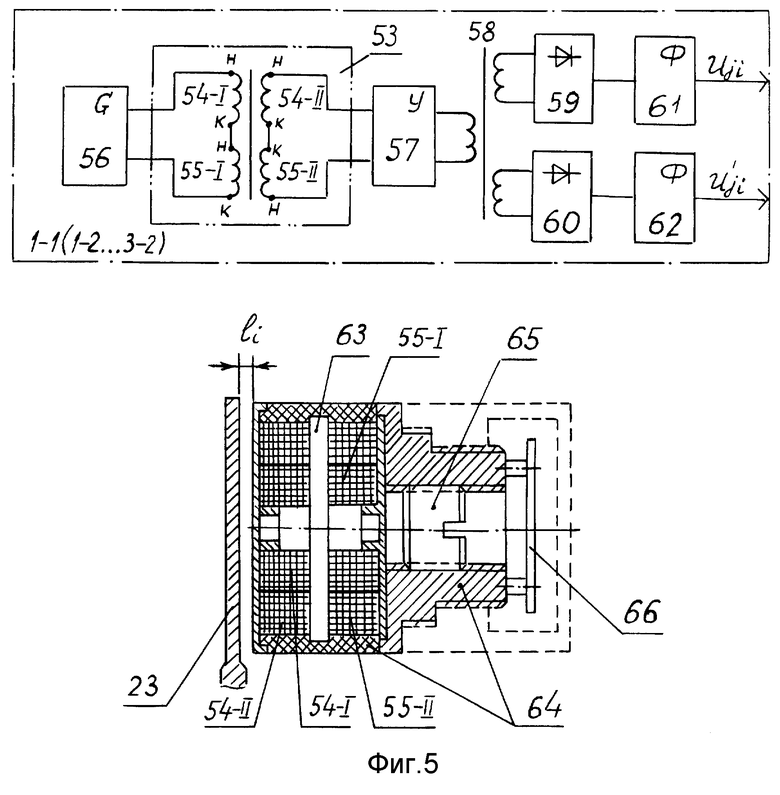
Основу датчиков 1-1. . . 3-2 составляют преобразователи 53 перемещений (фиг.5), например, индуктивно-трансформаторного типа, имеющие 4 обмотки: две первичные 54-I, 55-I и две вторичные 54-II, 55-II.
Кроме того, в состав каждого из датчиков входят генератор 56 синусоидальных колебаний, усилитель 57 переменного напряжения, разделительный трансформатор 58, двухполупериодные детекторы 59, 60 и RC-фильтры 61, 62.
Обмотки преобразователя 53 перемещений уложены на общем магнитопроводе 63 внутри цилиндрического корпуса 64. Первичные обмотки 54-I, 55-I включены последовательно согласно, а вторичные - 54-II и 55-II - встречно. Подвижный экран 65 предназначен для настройки преобразователя на заданное нормированное значение выходного напряжения. Элементы 56...62 датчика собраны на отдельной плате 66.
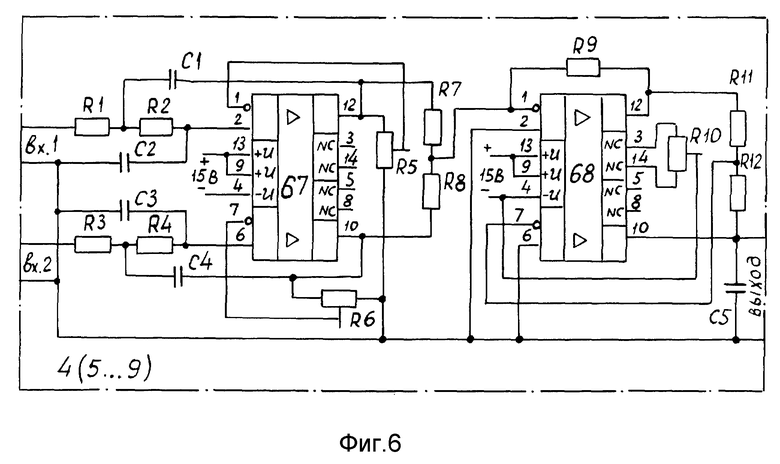
Каждый из сумматоров 4...9 напряжения выполнен на двухканальных операционных усилителях 67 и 68, например, типа 140УД20Б (фиг. 6). Первый из них является собственно сумматором напряжений постоянного тока, поступающих на их входы вх.1 и вх.2, а второй играет роль масштабного усилителя.
Устройство работает следующим образом.
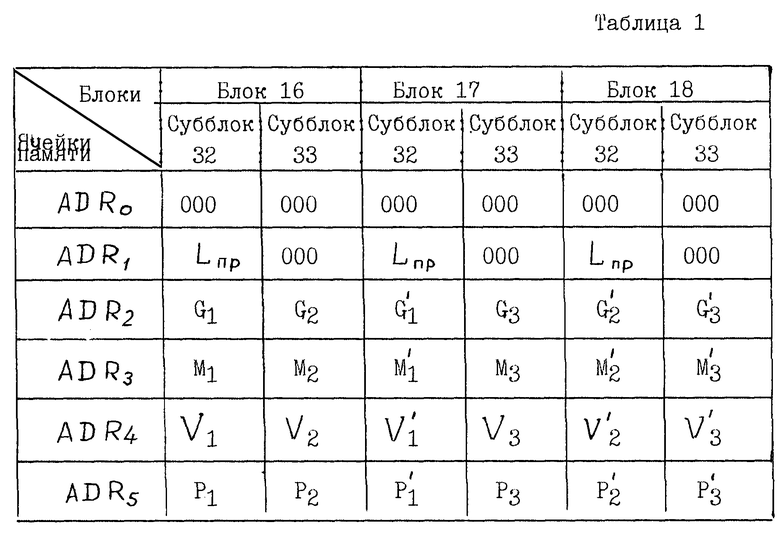
В исходном состоянии вал 22 турбомашины не вращается и не нагружен осевыми усилиями. Его положение между механическими упорами произвольно. Датчики 1-1. ..3-2 включены, т.е. их генераторы 56 вырабатывают синусоидальные сигналы стабильной частоты и стабилизированного напряжения, поступающие на первичные обмотки 54-I, 55-I преобразователей 53 перемещений. Разностные сигналы выходных обмоток 54-II, 55-II усиливаются элементами 57 и через разделительные трансформаторы 58 транслируются на двухполупериодные детекторы 59, 60 и фильтры 61, 62, где они преобразуются в аналоговые сигналы стандартного напряжения (0 - 6 В), текущие значения которого в общем случае зависят от величины зазора li. Поскольку в исходном состоянии расстояние между диском 23 и торцами всех шести датчиков практически одинаково, то сигналы на их выходах близки по величине. Ключ 20 разомкнут, т.е. на его выходе сформирован сигнал низкого уровня (логический "0"). В блоках 16, 17, 18 регистры 24, 25, счетчики 39 и D-триггеры 41...45 обнулены, элементы И 34. ..37 закрыты. На инверсном выходе D-триггера 41 установлен электрический сигнал высокого уровня (логическая "1"). В субблоки 32 и 33 памяти загружены данные, предназначенные для оценки достоверности измерительной информации, считываемой с выходов преобразователей 10...15 аналог-код, и контроля за предельно допустимыми смещениями вала 22. Вариант загрузки 32 и 33 приведен в табл. 1, где:
Lпр - предельно допустимое приращение контролируемого параметра относительно предыдущего измерительного цикла. Его кодовое значение определяется погрешностью измерения и преобразования измерительных сигналов.
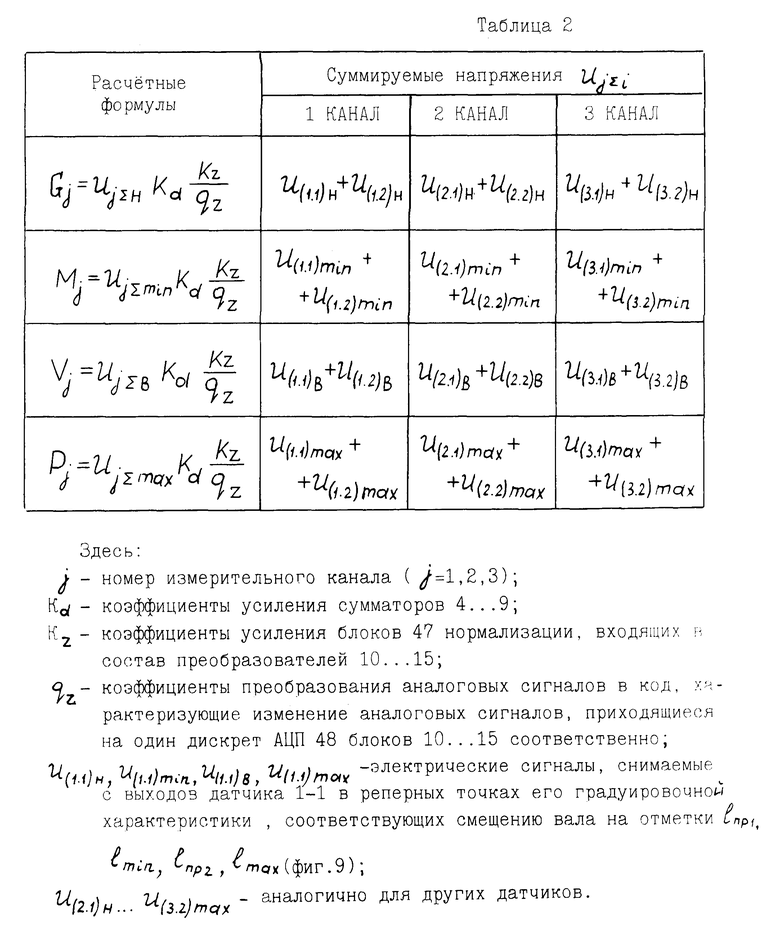
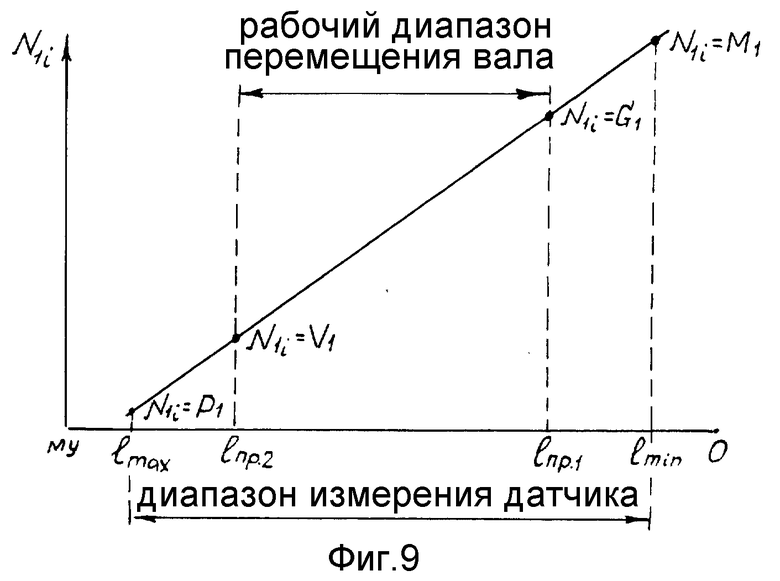
G1, G2...G'3 - нижние предельно допустимые значения контролируемого параметра, соответствующие минимально допустимому зазору между диском 23 и торцами датчиков, например, l пр.1 Вычисляются с учетом градуировочных характеристик датчиков 1-1...3-2 по соотношениям, приведенным в табл. 2.
M1, M2. . . M'3 и P1, P2...P'3 - значения кодовых сигналов, формируемых преобразователями 10...15 на нижнем и верхнем диапазонах измерения датчиков 1-1...3-2 соответственно.
V1, V2...V'3 - верхние предельно допустимые значения контролируемого параметра, соответствующие максимально допустимому зазору lпр.2 между диском 23 и торцами датчиков. Также определяется по соотношениям табл. 2.
Субблоки 29, 30 и 31 сравнения имеют два устойчивых состояния. Если кодовая информация, поступающая на их 1-ые входы, превышает по величине кодовые уставки, считываемые на их вторые входы с субблоков 32 и 33 памяти, то на их выходах устанавливаются логические 1. И наоборот, если кодовые уставки равны или превышают измерительные коды, то на их выходах появляются сигналы низкого уровня.
В каждый из преобразователей 40 кодов записана подпрограмма формирования управляющих команд, которая останавливается подачей сигнала низкого уровня на его вход A0.
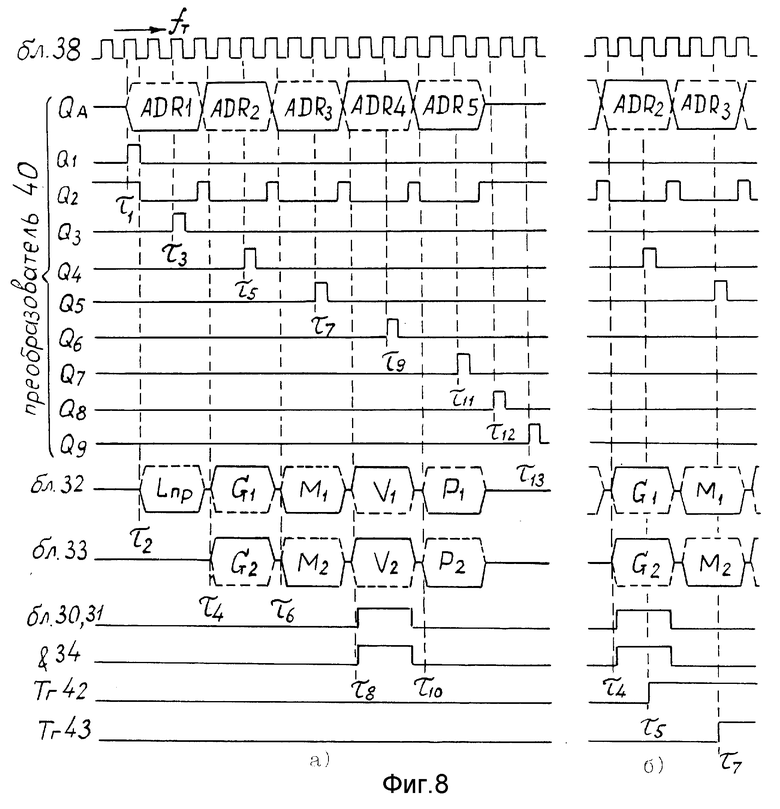
Устройство запускается в работу замыканием ключа 20 после того, как вал 22 турбомашины раскрутится до заданного значения угловой скорости и стабилизируются действующие на него разнополярные осевые усилия. При этом вал сместится в положение, в котором наступит равновесие этих сил. Коли все элементы турбомашины исправны, то новое положение вала будет находится в пределах его допустимого диапазона перемещений, т.е. между отметками lпр.1- lпр.2 (фиг. 9). На выходах датчиков 1-1...3-2 устанавливаются электрические сигналы из постоянных и переменных составляющих, причем последние обусловлены в основном прогибом вала 22 и биением подшипниковых узлов турбомашины. Поскольку датчики одного измерительного канала расположены диаметрально противоположно оси вала, то возбуждаемые ими переменные составляющие находятся в противофазе и взаимно компенсируются в сумматорах 4...9, не оказывая в дальнейшем какого-либо влияния на точность обработки измерительной информации. После замыкания ключа 20 в блоках 16, 17 и 18 открываются элементы И 37 и импульсы напряжения с тактовой частотой fт, вырабатываемые генераторами 38, начинают поступать в счетчики 39, считывая содержимое преобразователей 40, которые запрограммированы на формирование следующей серии управляющих команд (фиг.8, а):
- первые импульсы напряжения, возбуждаемые на их выходах Q1 в момент времени τ1, адресуются на входы опроса преобразователей 10...15 аналог-код, где они переписывают содержимое АЦП 48 в регистры 49, которое соответствует текущему значению Nji измеряемого параметра, равному
где j - номер измерительного канала (j = 1, 2, 3);
i - номер измерительного цикла;
UjΣi - сумма напряжений, формируемых датчиками одного измерительного канала и суммируемых соответственно элементами 4...9;
Kd - коэффициенты усиления сумматоров 4...9;
Kz - коэффициенты усиления блоков 47 нормализации;
qz - коэффициенты преобразования аналоговых сигналов и код, характеризующие изменение напряжения, приходящееся на один дискрет АЦП 48;
- информационные коды Nji, сформированные двумя взаимно несвязанными каналами, транслируются на вторые входы вычитателей 26, 27, которые вычисляют приращения контролируемого параметра за интервал времени, равный длительности измерительного цикла:
Δji= Nji-Nj(i-1) (2)
- вычитатели 28 определяют абсолютные разности Lji вычисленных приращений и полученные результаты считывают на первые входы субблоков 29 сравнения кодов:
- одновременно в момент времени τ1 на выходах QA преобразователей 40 устанавливаются единичные коды AD R1, которые поступают на адресные входы субблоков памяти 32 и 33;
- в момент времени τ2 на вторых выходах Q2 преобразователей 40 формируются сигналы низкого уровня, по которым содержимое первых ячеек памяти субблоков 32 в виде пороговых уставок Lпр выводится на вторые входы субблоков сравнения 29;
- если все три измерительные каналы исправны, то выделяемые вычитателями 28 разности Lji приращений близки нулю и на выходах субблоков 29 будут оставаться нулевые сигналы;
- при появлении какого-либо дефекта в одном из измерительных каналов вышеуказанная разность приращений контролируемого параметра по отношению к другим каналам будет заметной и превысит кодовую уставку Lпр - в этом случае элемент 29 соответствующего блока 16...18 выдает единичный сигнал, который по третьей команде преобразователя 40 (момент времени τ3 ) переписывается в D-триггер 41, обесточивая его инверсный выход, закрывая тем самым элемент И 34, и через вход A0 преобразователя 40, блокируя формирование на его выходах всех последующих команд;
- следующие две команды (моменты времени τ4 и τ5) ) предназначены для вывода из субблоков памяти 32, 33 пороговых уставок G1, G2 и их сравнения с информационными кодами Nji
- если контролируемый параметр li находится в пределах рабочего диапазона перемещений (lпр2 > li > lпр1), то коды Nji меньше пороговых уставок G1, G2 и на выходах субблоков 30, 31 сравнения, а также на прямых выходах элементов И 34 остаются нулевые сигналы, вследствие чего при опросе D-триггеров 42 командами Q4 их состояние не изменяется;
- если (lпр2 > li > lпр1), то информационные коды Nji меньше уставок M1, M2, соответствующих нижнему lmin диапазону измерения датчиков 1-1...3-2 (выводятся из субблоков 32, 33 в момент времени τ6), и при опросе D-триггеров 43 командами Q5 их состояние также остается неизменным;
- в момент времени τ8 из субблоков памяти 32, 33 считывается 2-ая пара пороговых уставок V1, V2, причем если (lпр2 > li > lпр1), то значения информационных кодов Nji больше V1, V2 и на выходах субблоков 30, 31 сравнения будут сформированы единичные сигналы;
- в этом случае откроются элементы И 34 и на их инверсных выходах установятся нулевые сигналы, которые блокируют переключение D-триггеров 44 командами Q6, а затем и D-триггеров 45;
- команды Q8 (момент времени τ12) адресуются на входы разрешения записи регистров 24, 25 для считывания в них информационных кодов Nji - в следующем измерительном цикле они будут иметь индекс i-1;
- по командам Q9, возбуждаемым в момент времени τ13, счетчики 39 возвращаются в исходное состояние, а затем вновь считывают содержимое преобразователей 40, организуя очередной (i+1) измерительный цикл.
Если в турбомашине появляется какая-либо неисправность, то баланс осевых сил, действующих на вал 22, нарушается и он начинает перемещаться в какую-либо сторону в зависимости от характера дефекта. При выбеге вала за пределы рабочего диапазона, например, в сторону уменьшения зазора li, информационные коды Nji превысят по величине пороговые уставки (G1, G2, вследствие чего в момент времени τ4 (фиг. 8, б) на выходах субблоков 30, 31 сравнения устанавливаются единичные сигналы, которые открывают элементы И 34, следующим образом видоизменяя состояние схемы устройства:
- при опросе D-триггеров 42 командами Q4 они переводятся в единичное состояние и подготавливают к работе элементы И 35;
при считывании из субблоков памяти 32, 33 кодов M1, M2 (для подтверждения достоверности измерительной информации) на выходах блоков 30, 31 сравнения формируются сигналы низкого уровня, которые переключают элементы И 34, 35 (элементы И 34 закрываются, а 35 - открываются);
- при опросе D-триггеров 43 командами Q5 они устанавливаются в единичное состояние и сигналы высокого уровня с их выходов через элементы ИЛИ 46, 19 транслируются на выход устройства, сигнализируя об аварийном состоянии турбомашины.
Аналогичным образом схема устройства реагирует на смещение вала 22 за пределы рабочего диапазона в сторону увеличения зазора li. В этом случае информационные коды, Nji будут меньше пороговых уставок V1, V2 и на выходах блоков 30, 31 сравнения в момент времени τ8 устанавливаются сигналы низкого уровня. Поэтому при опросе D-триггеров 44 командами Q6 они переводятся в единичное состояние, задействуя в работу элементы И 36, а затем и D-триггеры 45, которые формируют на выходе устройства аварийный сигнал в виде логической 1.
Для варианта реализации устройства на базе средств вычислительной техники на фиг.10 приведена структурная схема алгоритма обработки информационных кодов Nji, формируемых преобразователями 10...15, и выделения аварийного сигнала, составленного в точном соответствии с вышерассмотренной схемой устройства. Предполагается, что обработка измерительной информации осуществляется с помощью трех независимо работающих ЭВМ (на фиг.1 им эквивалентны соответственно блоки 16, 17 и 18), каждая из которых в течение одного измерительного цикла предусматривает считывание в ее оперативную память информационных кодов Nji, вычисление приращений  по уравнениям (2), (3), определение их разности Lji по соотношению (4) для оценки достоверности введенной информации и выполнение логических операций сравнения, по результатам которых формируется сигнал (AC=1) аварийного состояния турбомашины (S=2 означает операцию суммирования).
по уравнениям (2), (3), определение их разности Lji по соотношению (4) для оценки достоверности введенной информации и выполнение логических операций сравнения, по результатам которых формируется сигнал (AC=1) аварийного состояния турбомашины (S=2 означает операцию суммирования).
Таким образом, предлагаемое устройство обладает повышенной надежностью, т. к. отказ одного-двух любых его схемных элементов не приводит к потере его работоспособности в части выявления аварийного состояния турбомашины. Кроме того, надежность устройства повышена за счет двойного контроля достоверности измерительной информации: в начале каждого измерительного цикла проверяется идентичность приращений информационных кодов, а аварийный сигнал формируется только лишь в том случае, если показания датчиков линейных перемещений находятся в заранее выбранных пределах их измерительных диапазонов.
Экономический эффект от использования данного предложения заключается в возможности создания высоконадежных устройств, предназначенных для контроля за работой турбомашин. В частности, на предприятии-заявителе предлагаемое техническое решение будет использовано в системах аварийного отключения ЖРД по осевым перемещениям вала турбонасосного агрегата, где недопустимо как формирование "ложных" аварийных сигналов, так и отказ аппаратуры из-за появления локальных дефектов в ее функциональных элементах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ЖИДКОСТИ | 1991 |
|
RU2012848C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1993 |
|
RU2079876C1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1798719A1 |
| СПОСОБ ВЫКЛЮЧЕНИЯ ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЕЙ СОСТАВНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2079690C1 |
| БЫСТРОРАЗЪЕМНОЕ СОЕДИНЕНИЕ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 1996 |
|
RU2129684C1 |
| Устройство для измерения параметров жидкости | 1990 |
|
SU1830460A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1800380A1 |

Использование: в измерительной технике в системах автоматического контроля предельно допустимых осевых перемещений вращающихся деталей, в частности вала турбомашины. Сущность изобретения: устройство содержит три пары датчиков 1-1,1-2. ..3-2 линейных перемещений, сумматоры 4,5...9 напряжений, преобразователи 10, 11...15 аналог-код, три блока 16,17,18 обработки измерительной информации, элемент ИЛИ 19 и ключ 20. Датчики 1-1,1-2, а также 2-1,2-2 и 3-1,3-2 расположены симметрично оси контролируемого вала под углом 180o, вследствие чего переменные составляющие измерительных сигналов взаимно компенсируются при их суммировании элементами 4...9, не оказывая в дальнейшем какого-либо влияния на точность обработки измерительной информации, результатом которой является выдача аварийного сигнала при перемещении вала за пределы допустимых значений. Устройство обладает повышенной надежностью как за счет аппаратурного резервирования, так и за счет двойного контроля достоверности измерительной информации, считываемой в блоки 16,17,18. В начале каждого измерительного цикла проверяется идентичность приращений измерительных кодов по отношению к предыдущему циклу, а аварийный сигнал формируется только лишь в том случае, если показания датчиков линейных перемещений находятся в заранее выбранных пределах их измерительных диапазонов. 1 з.п. ф-лы, 2 табл., 10 ил.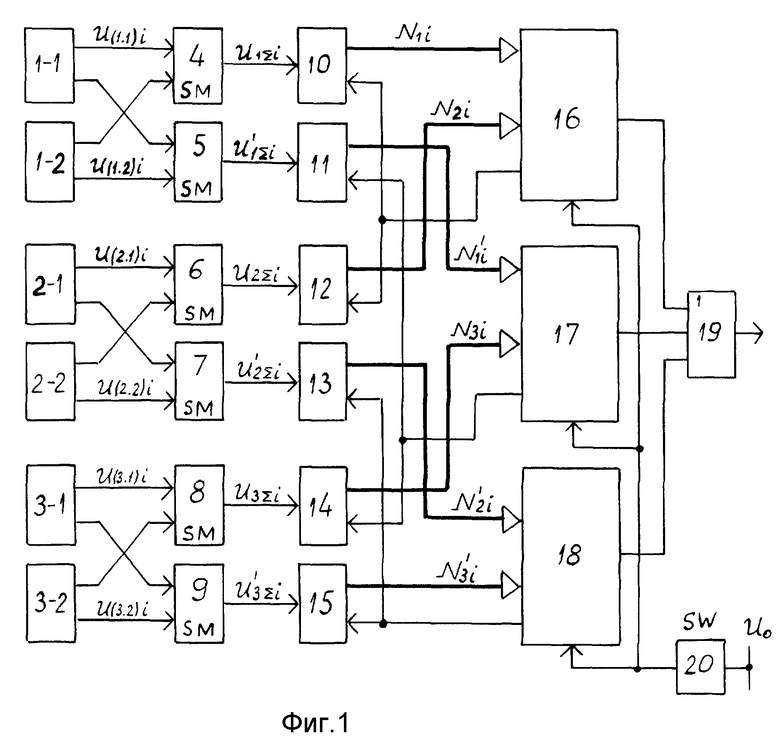
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ сигнализации аварийного состояния турбомашины | 1985 |
|
SU1321843A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1798719A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

