Устройство относится к стабилизационным платформам и может быть использовано для ориентации антенных устройств.
Известно "Устройство стабилизации платформы антенны при помощи комбинированного метода с использованием гидросистемы и системы карданного подвеса" (патент США N 3.893.123), содержащее поворотную платформу, установленную на двухосном карданном подвесе. Недостатком известного устройства является уравновешивание подвижных масс с помощью дополнительных грузов, что способствует увеличению общей инерционной массы устройства и снижение его динамической точности.
Этого недостатка лишено известное устройство "Вращающаяся антенна со стабилизированной плоскостью", содержащее поворотную платформу, состоящую из подвижной и неподвижной частей, установленную на двухосном карданном подвесе, при этом на неподвижной части установлен привод, двигатель которого кинематически соединен с центральным зубчатым колесом. Центры масс подвижных частей известного устройства сведены к точке пересечения осей карданного подвеса. Данное устройство принято за прототип.
Недостатком известного устройства является то, что привод поворотной платформы имеет люфт в зубчатом зацеплении. Люфт в зубчатой передаче, а также циклическая погрешность зубчатых колес влияют на точность следящего привода вращения объекта ориентации, в частности, антенны. Известно, что чем меньше люфт в зубчатых зацеплениях и чем меньше их модуль, тем выше точность передачи и, соответственно, привода в целом. В высоконагруженных устройствах, требующих высокой точности позиционирования объекта, конструктивная схема известного устройства не приемлема. В этом случае модуль однопарного зубчатого зацепления привода с центральным колесом должен иметь большое значение от 5 мм и выше. При этом существенно возрастает циклическая погрешность зубчатых колес и снижается точность ориентации объекта.
Люфт в зацеплении можно выбрать механически посредством подпружиненных разрезных зубчатых колес. Благодаря этому может быть исключена составляющая бокового зазора зубчатого зацепления. Однако усилие пружин должно быть рассчитано на максимальную внешнюю нагрузку. В связи с этим даже при малых моментах внешней нагрузки необходимо расходовать мощность на преодоление трения в зубчатой паре, соответствующее полной нагрузке. При этом возрастает износ зубчатого зацепления, долговечность устройства снижается. Такое решение не является оптимальным.
Целью настоящего изобретения является повышение точности ориентации объекта и надежности устройства.
Указанная цель достигается тем, что в устройстве, содержащем поворотную платформу, состоящую из подвижной и неподвижной частей, установленную на двухосном карданном подвесе, привод установленный на неподвижной части платформы, двигатель которого кинематически соединен с центральным зубчатым колесом, расположенным на подвижной части поворотной платформы, привод выполнен гидравлическим многодвигательным, гидродвигатели установлены на неподвижной части поворотной платформы и кинематически соединены с центральным зубчатым колесом, причем гидродвигатели попарно и в противофазе подключены к выходам электрогидравлических усилителей и входам датчиков перепада давления, выходы которых подключены к первому и второму выходам первых сумматоров непосредственно и через второй сумматор с коэффициентом суммирования 1/n, где n - число пар двигателей, при этом выходы парных сумматоров подключены через электронный усилитель к выходам электрогидравлических усилителей, а третьи входы первых сумматоров подключены к выходу устройства формирования закона управления, вход которого подключен к выходу третьего сумматора, первый вход которого подключен к выходу устройства измерения скорости, а второй вход - к устройству задания скорости.
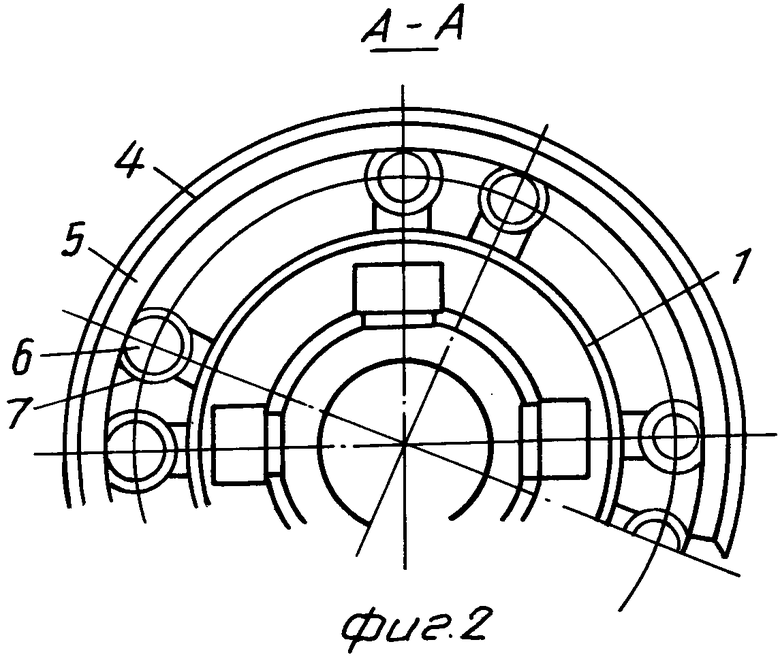
На фиг. 1 изображено устройство, продольный разрез; на фиг. 2 - поперечный разрез; на фиг. 3 - принципиальная схема, подключение двигателей; на фиг. 4 - структурная схема управления платформой.
Поворотная платформа содержит неподвижную часть 1, на которой посредством подшипников 2,3 установлена подвижная часть 4, предназначенная для крепления объекта ориентации.
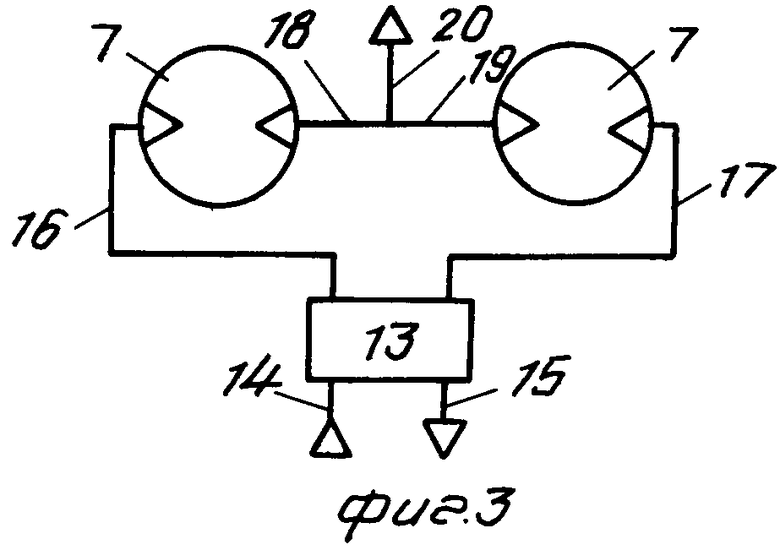
На подвижной части 4 закреплено центральное зубчатое колесо 5, с которым подвижно соединены зубчатые колеса 6, установленные на выходных валах двигателей 7. Неподвижная часть 1 поворотной платформы посредством шарнирных опор 8 установлена на раме-крестовине 9 карданного подвеса. Рама-крестовина 9 посредством шарниров 10 и опор 11 закреплена на основании 12. Двигатели 7, например, выполнены как реверсируемые гидродвигатели, управление которыми осуществляется посредством электрогидравлических усилителей 13. Электрогидравлические усилители 13 управляют парами гидродвигателей. К электрогидроусилителю подведены гидравлические магистрали напора 14 и слива 15. Каналы управления 16 и 17 соединяют электрогидроусилитель с двумя гидродвигателями таким образом, что канал 16 соединен с полостью прямого вращения первого двигателя, а канал 17 - с полостью обратного вращения второго двигателя. При этом каналы обратного вращения 18 первого двигателя и прямого вращения 19 второго двигателя соединены со сливной магистралью 20.
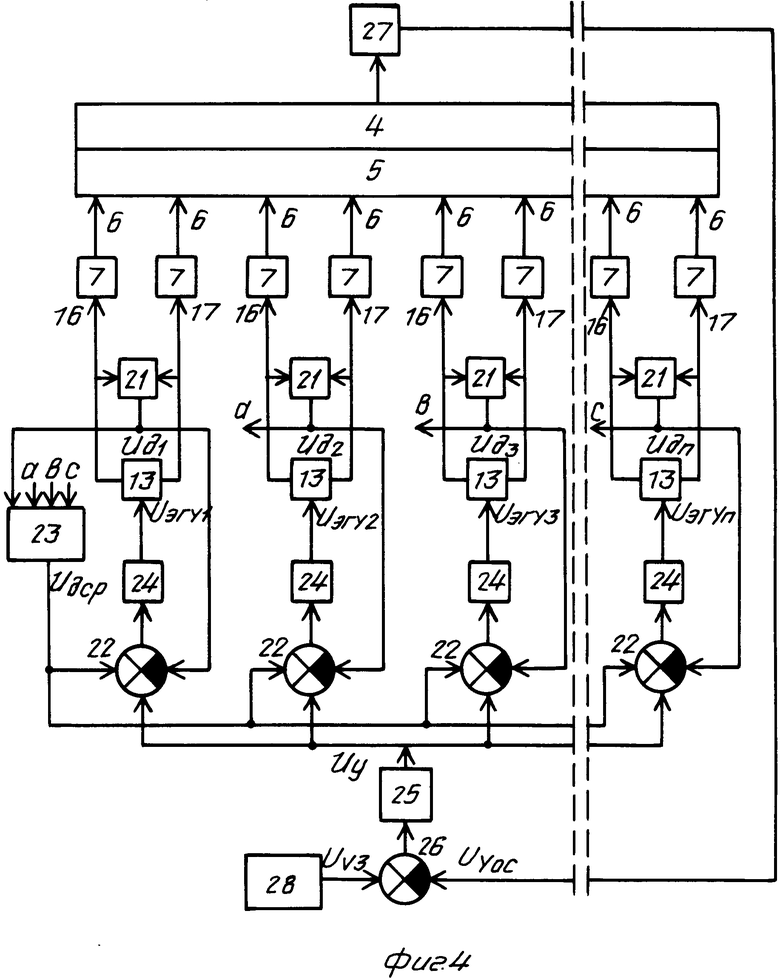
Для каждой пары гидродвигателей 7 между каналами 16 и 17 параллельно электрогидроусилителю подключен датчик перепада давления 21 (выходной сигнал Uд1), выход которого подключен к первому и второму входам первого сумматора 22 непосредственно и через второй сумматор 23 (выходной сигнал Uдср). Выходы парных сумматоров 22 через электронные усилители 24 подключены ко входам электрогидроусилителей 13 (сигнал (Uэгуi). Выход формирователя закона управления 25 (сигнал Uy) подключен к третьим входам парных сумматоров 22. Закон управления (пропорциональный, интегральный и т. д. ) определяется параметром конкретного устройства пространственной ориентации объекта, параметрами гидродвигателей, а также требуемой статической и динамической точностью отработки заданного закона скорости перемещения объекта. На вход формирователя закона управления 25 подается с выхода третьего сумматора 26 сигнал ошибки по скорости, формируемый как разность между действительной скоростью движения объекта (сигнал Uvoc), с устройства измерения скорости 27 и заданной скоростью движения (сигнал Uvз) с устройства задания скорости 28.
Поскольку в предложенном устройстве привод является многодвигательным, то количество пар зубчатых зацеплений, участвующих одновременно в передаче крутящего момента подвижной части 4 больше, чем у прототипа. Такое решение позволяет в высоконагруженных устройствах понизить модуль зубчатого зацепления в 2. . . 3 раза.
Противофазное включение пар двигателей обеспечивает постоянный выбор бокового зазора в зубчатых зацеплениях, а уменьшение модуля снижает величину циклической погрешности передачи, что в сумме повышает точность ориентации объекта. Использование многодвигательного привода замкнутого на общее зубчатое колесо увеличивает нагрузочную способность и надежность зубчатой передачи, так как увеличивается число пар зубчатых зацеплений в передаче.
Устройство работает следующим образом.
При подаче гидравлического питания к электрогидравлическому усилителю и соответствующего электрического сигнала от системы управления в каналах 16 и 17 возникает управляемый поток рабочей жидкости. Вращение выходных валов двигателей происходит в том случае, когда перепад давлений в полостях гидродвигателей, и следовательно в каналах 16,17 ΔР > 0. Прямое вращение происходит когда давление в канале 16 больше, чем в канале 17, а обратное когда давление в канале 17 больше, чем в канале 16.
Поскольку в канале с меньшим давлением всегда имеется подпор рабочей жидкости, т. е. давление в канале - больше нуля, то один из двигателей всегда стремится работать в направлении противоположном одному, заданному. Этим обеспечивается постоянное силовое поджатие зубчатых колес друг к другу. При реверсе не требуется выбирание люфта, что положительно сказывается на динамической и статической составляющих ошибки управления ориентации объекта, точность устройства увеличивается. Таким образом, при подаче сигналов управления пары двигателей замыкаются посредством зубчатых колес 6 на центральное колесо 5 и приводят во вращение подвижную часть 4 поворотной платформы, обеспечивая необходимую безлюфтовую ориентацию объекта по горизонту.
При совместной работе пар двигателей на одну общую нагрузку для повышения надежности необходимо обеспечить одинаковую нагрузку на всех парах двигателей (нагрузка измеряется датчиком перепада давления 21). Сигнал управления Uy = F (Uvз-Uvoc) одинаковый для всех приводов, пар двигателей 7, поступает на третьи входы первых сумматоров 22 и является основным для формирования управляющих сигналов Uэгуiэлектрогидроусилителей.
ΔUэгуi = Kгуi (Uy + ΔUдi) i = [1, n] ; где Кгуi - коэффициент электронного усилителя 24;
ΔUдi = Uдcр - Uдi - корректирующий сигнал по нагрузке i пары двигателей 7;
Ucp = Ucp= 
 U∂iUдi - среднее значение перепада давления на входах всех пар двигателей 7.
U∂iUдi - среднее значение перепада давления на входах всех пар двигателей 7.
За счет дополнительного корректирующего сигнала ΔUдi обеспечивается выравнивание условий работы пар двигателей ΔUдi->>0 при Кгуi->>∞, а Uд1 ->>Uд2->>Uд3 = . . . = Uдn при общей для многодвигательного устройства обратной связи по скорости.
Технико-экономическая эффективность предлагаемого технического решения заключается в повышении точности устройства за счет снижения циклической погрешности зубчатых зацеплений привода в 2-3 раза, а также за счет постоянного выбирания бокового зазора в зубчатых зацеплениях за счет попарного реверсного включения двигателей. Кроме того, достигается повышение надежности устройства и его долговечности, благодаря тому, что силовое выбирание люфта происходит пропорционально сигналу управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2184281C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ ОПТИЧЕСКИХ КАНАЛОВ | 2024 |
|
RU2831620C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2133386C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД | 2001 |
|
RU2212576C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЦЕНТРИРОВАНИЯ ПРИЦЕЛЬНОГО УСТРОЙСТВА И ПОВОРОТНОГО ЭЛЕМЕНТА | 2002 |
|
RU2234040C2 |
| АВТОНОМНЫЙ РУЛЕВОЙ ГИДРОПРИВОД | 1985 |
|
SU1839993A1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Многокомпонентные аэродинамические весы | 1972 |
|
SU437943A1 |
| Устройство для измерения углов отклонения подвижного объекта | 1991 |
|
SU1810756A1 |
Использование: стабилизация поворотных платформ антенных устройств. Сущность изобретения: на подвижной части 4 закреплено центральное зубчатое колесо 5, с которым подвижно соединены зубчатые колеса 6. Зубчатые колеса установлены на выходных валах реверсивных гидравлических двигателей 7. Электрогидравлические усилители (ЭГУ) управляют парами гидродвигателей. Два канала управления соединяют ЭГУ с двумя гидродвигателями таким образом, что один канал соединен с полостью прямого вращения первого двигателя, а другой канал - с полостью обратного вращения второго двигателя. Для каждой пары гидродвигателей между каналами параллельно ЭГУ подключен датчик перепада давления. Устройство обратной связи осуществляет внешнюю электрическую обратную связь по положению выходного звена. 4 ил.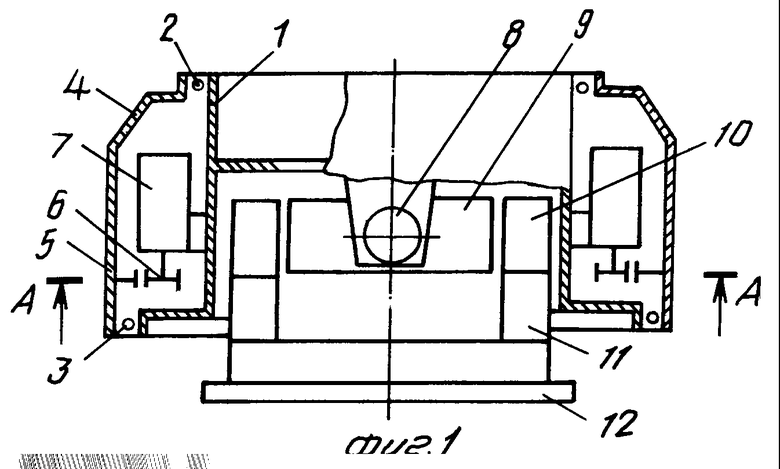
УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА, содержащее поворотную платформу, состоящую из подвижной и неподвижной частей, установленную на двухосном карданном подвесе, привод, установленный на неподвижной части поворотной платформы, двигатель которого кинематически соединен с центральным зубчатым колесом, расположенным на подвижной части поворотной платформы, отличающееся тем, что, с целью повышения точности ориентации объекта и надежности устройства, привод выполнен гидравлическим многодвигательным, гидродвигатели установлены на неподвижной части поворотной платформы и кинематически соединены с центральным зубчатым колесом, причем гидродвигатели попарно и в противофазе подключены к выходам электрогидравлических усилителей и входам датчиков перепада давления, выходы которых подключены к первому и второму выходам первых сумматоров непосредственно и через второй сумматор с коэффициентом суммирования 1/n, где n - число пар гидродвигателей, при этом выходы первых сумматоров подключены через электронный усилитель к выходам электрогидравлических усилителей, а третьи входы первых сумматоров подключены к выходу устройства формирования закона управления, вход которого подключен к выходу третьего сумматора, первый вход которого подключен к выходу устройства измерения скорости, а второй вход - к устройству задания скорости.
