1
Изобретение относится к области измерительной техники и предназначается для экспериментального определения всех компонент воздействия воздушного потока на асимметричные модели сложной формы при их равномерном вращении в аэродинамической трубе вокруг оси, перпендикулярной к направлению потока.
Известны многокомпонентные аэродинамические весы для исследования вращающихся моделей, содержащие фундаментный корпус, плавающую платформу, устройство, поддерживающее модель, и тензодинамометрическую измерительную систему.
Однако для таких весов характерны большая погрешность динамических измерений аэродинамических сил и моментов вследствие недостаточной жесткости тензодинамометрической системы весов, из-за наличия люфтовых соединений элементов и зубчатых зацеплений в силовой цепи, передающей крутящий момент от вала двигателя к испытываемой модели, а также вследствие влияния момента сил трения в опорных подшипниках и инерционного момента относительно оси вращения на измерение аэродинамического момента относительно этой же оси.
Цель изобретения - уменьшение погрешности динамических измерений компонент аэродинамического воздействия при исследовании асимметричных моделей сложной формы.
Это достигается благодаря тому, что предлагаемые весы спабл ены гидросистемой, включающей гидродвигатель, соединенный с гидронасосом, дифференциальный датчик давления, датчик углового ускорения и мостовую схему развязки момента относительно оси вращения, причем выходные цепи датчиков давления и углового ускорения вместе с выходом мостовой схемы образуют суммирующую схему.
Кроме того, весы имеют поворотный столик, соединенный с гидродвигателем при помощи пружиппо-карданпого вала, упругие шарниры которого выполнены в виде прорезных пружин, а плавающая платформа - в виде утолщенного по концам полого цилиндра и соединена с фундаментным корпусом шестью стержневыми динамометрами с двухстепенными упругими шарнирами вблизи концов.
Для установки большего числа тензодатчиков поперечное сечение средней части каждого динамометра имеет Н-образную форму.
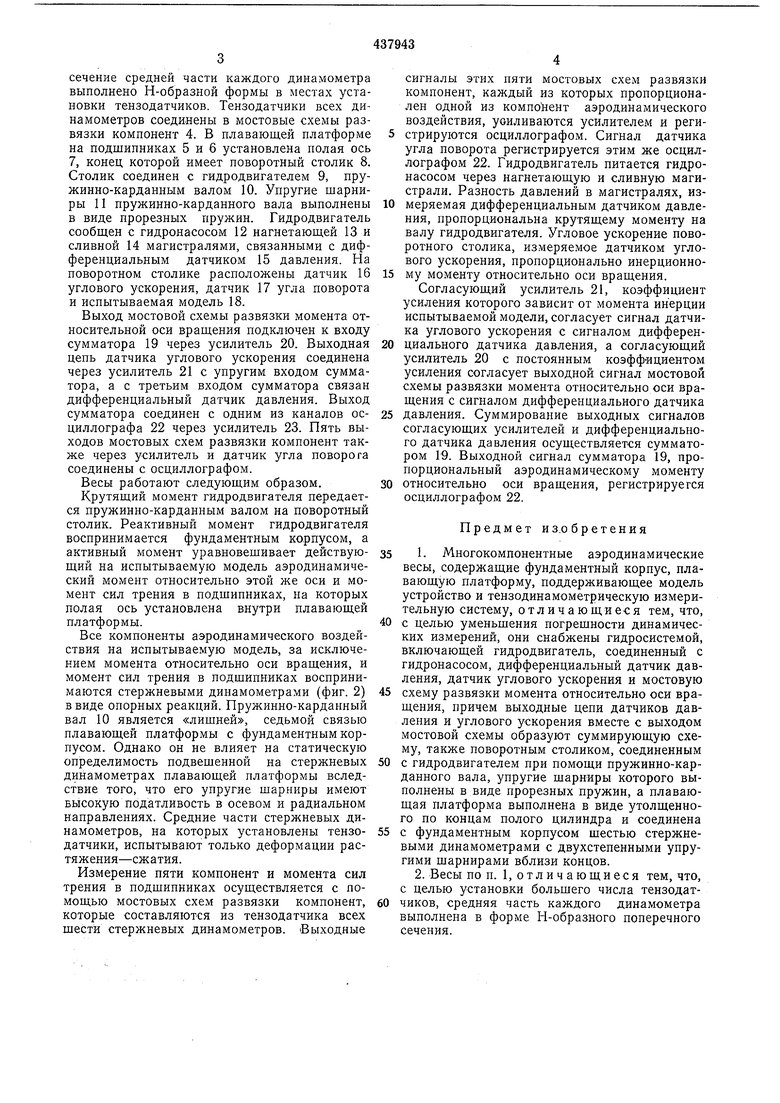
На фиг. 1 показана схема весов; на фиг. 2- стержневой динамометр с разрезами по А-А и Б-Б.
Весы содержат плавающую платформу 1, выполненную в виде утолщенного по концам полого цилиндра и соединенного с фупдаментным корпусом 2 шестью стержневыми динамометрами 3, которые вблизи концов имеют упругие двухстепенные шарниры. Поперечное
сечение средней части каждого динамометра выполнено Н-образной формы в местах установки тензодатчиков. Тензодатчики всех динамометров соединены в мостовые схемы развязки компонент 4. В плавающей платформе на подшипниках 5 и 6 установлена полая ось 7, конец которой имеет поворотный столик 8. Столик соединен с гидродвигателем 9, пружинно-карданным валом 10. Упругие шарниры 11 пружинно-карданного вала выполнены в виде прорезных пружин. Гидродвигатель сообщен с гидронасосом 12 нагнетающей 13 и сливной 14 магистралями, связанными с дифференциальным датчиком 15 давления. На поворотном столике расположены датчик 16 углового ускорения, датчик 17 угла поворота и испытываемая модель 18.
Выход мостовой схемы развязки момента относительной оси вращения подключен к входу сумматора 19 через усилитель 20. Выходная цепь датчика углового ускорения соединена через усилитель 21 с упругим входом сумматора, а с третьим входом сумматора связан дифференциальный датчик давления. Выход сумматора соединен с одним из каналов осциллографа 22 через усилитель 23. Пять выходов мостовых схем развязки компонент также через усилитель и датчик угла поворота соединены с осциллографом.
Весы работают следующим образом.
Крутящий момент гидродвигателя передается пружинно-карданным валом на поворотный столик. Реактивный момент гидродвигателя воспринимается фундаментным корпусом, а активный момент уравновешивает действующий на испытываемую модель аэродинамический момент относительно этой же оси и момент сил трения в подшипниках, на которых полая ось установлена внутри плавающей платформы.
Все компоненты аэродинамического воздействия на испытываемую модель, за исключением момента относительно оси вращения, и момент сил трения в подщипниках воспринимаются стержневыми динамометрами (фиг. 2) в виде опорных реакций. Пружинно-карданный вал 10 является «лишней, седьмой связью плавающей платформы с фундаментным корпусом. Однако он не влияет на статическую определимость подвещенной на стержневых динамометрах плавающей платформы вследствие того, что его упругие шарниры имеют высокую податливость в осевом и радиальном направлениях. Средние части стержневых динамометров, на которых установлены тензодатчики, испытывают только деформации растяжения-сжатия.
Измерение пяти компонент и момента сил трения в подшипниках осуществляется с помощью мостовых схем развязки компонент, которые составляются из тензодатчика всех шести стержневых динамометров. Выходные
сигналы этих пяти мостовых схем развязки компонент, каждый из которых пропорционален одной из компонент аэродинамического воздействия, усиливаются усилителем и регистрируются осциллографом. Сигнал датчика угла поворота регистрируется этим же осциллографом 22. Гидродвигатель питается гидронасосом через нагнетающую и сливную магистрали. Разность давлений в магистралях, измеряемая дифференциальным датчиком давления, пропорциональна крутящему моменту на валу гидродвигателя. Угловое ускорение поворотного столика, измеряемое датчиком углового ускорения, пропорционально инерционному моменту относительно оси вращения.
Согласующий усилитель 21, коэффициент усиления которого зависит от момента инерции испытываемой модели, согласует сигнал датчика углового ускорения с сигналом дифференциального датчика давления, а согласующий усилитель 20 с постоянным коэффициентом усиления согласует выходной сигнал мостовой схемы развязки момента относительно оси вращения с сигналом дифференциального датчика
давления. Суммирование выходных сигналов согласующих усилителей и дифференциального датчика давления осуществляется сумматором 19. Выходной сигнал сумматора 19, пропорциональный аэродинамическому моменту
относительно оси вращения, регистрируегся осциллографом 22.
Предмет из обретения
1. Многокомпонентные аэродинамические весы, содержащие фундаментный корпус, плавающую платформу, поддерживающее модель устройство и тензодинамометрическую измерительную систему, отличающиеся тем, что,
с целью уменьшения погрешности динамических измерений, они снабжены гидросистемой, включающей гидродвигатель, соединенный с гидронасосом, дифференциальный датчик давления, датчик углового ускорения и мостовую
схему развязки момента относительно оси вращения, причем выходные цепи датчиков давления и углового ускорения вместе с выходом мостовой схемы образуют суммирующую схему, также поворотным столиком, соединенным
с гидродвигателем при помощи пружинно-карданного вала, упругие шарниры которого выполнены в виде прорезных пружин, а плавающая платформа выполнена в виде утолщенного по концам полого цилиндра и соединена
с фундаментным корпусом шестью стержневыми динамометрами с двухстепенными упругими шарнирами вблизи концов.
2. Весы по п. 1, отличающиеся тем, что, с целью установки большего числа тензодатчиков, средняя часть каждого динамометра выполнена в форме Н-образного поперечного сечения.
5. /7
/r Kja-n
/ / / / 9 15 № 15 72
21
16 6 3
I I
/
25 22
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2012 |
|
RU2498243C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ШАРНИРНОГО МОМЕНТА РУЛЕВЫХ ОРГАНОВ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ИСПЫТАНИИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243526C1 |
| АЭРОДИНАМИЧЕСКИЕ ВЕСЫ | 2012 |
|
RU2517778C2 |
| МНОГОКАНАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО АЭРОДИНАМИЧЕСКИХ ВНУТРИМОДЕЛЬНЫХ ВЕСОВ | 2011 |
|
RU2469283C1 |
| АЭРОДИНАМИЧЕСКИЕ ВЕСЫ | 1971 |
|
SU301552A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ С СИСТЕМОЙ КОНТРОЛЯ И НАСТРОЙКИ | 2003 |
|
RU2240749C1 |
| МНОГОКАНАЛЬНОЕ ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2249190C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |

0-0
A -f(
PU.Z.I
